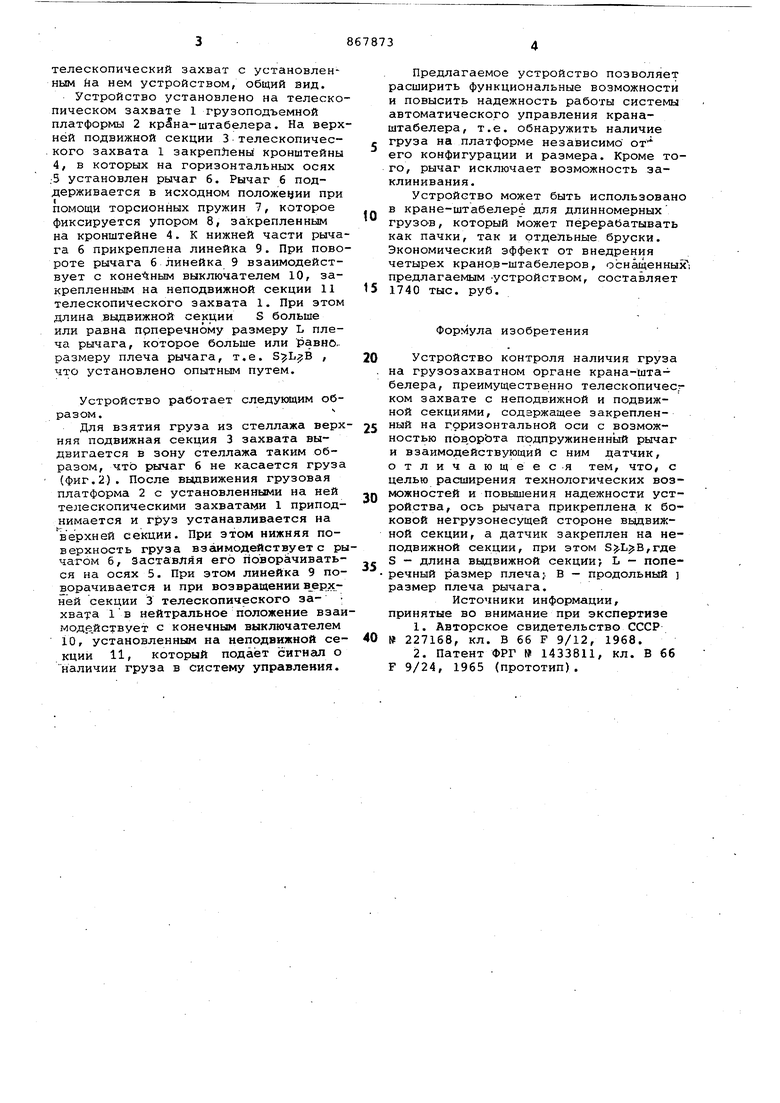
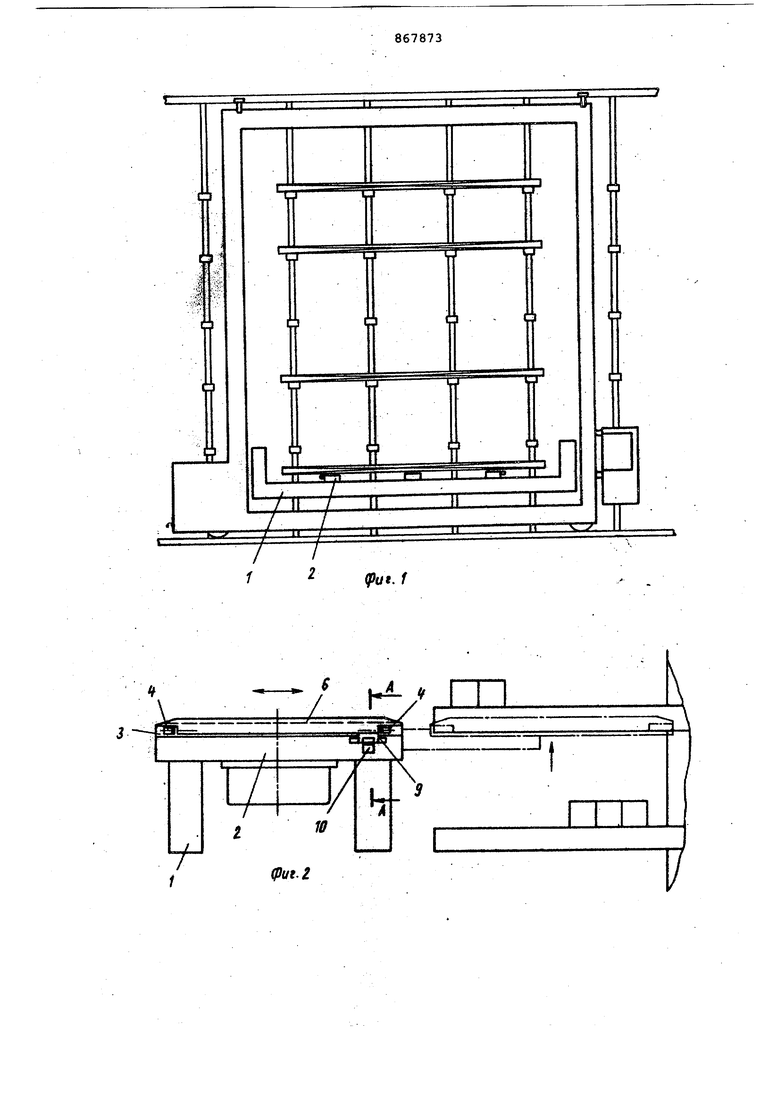
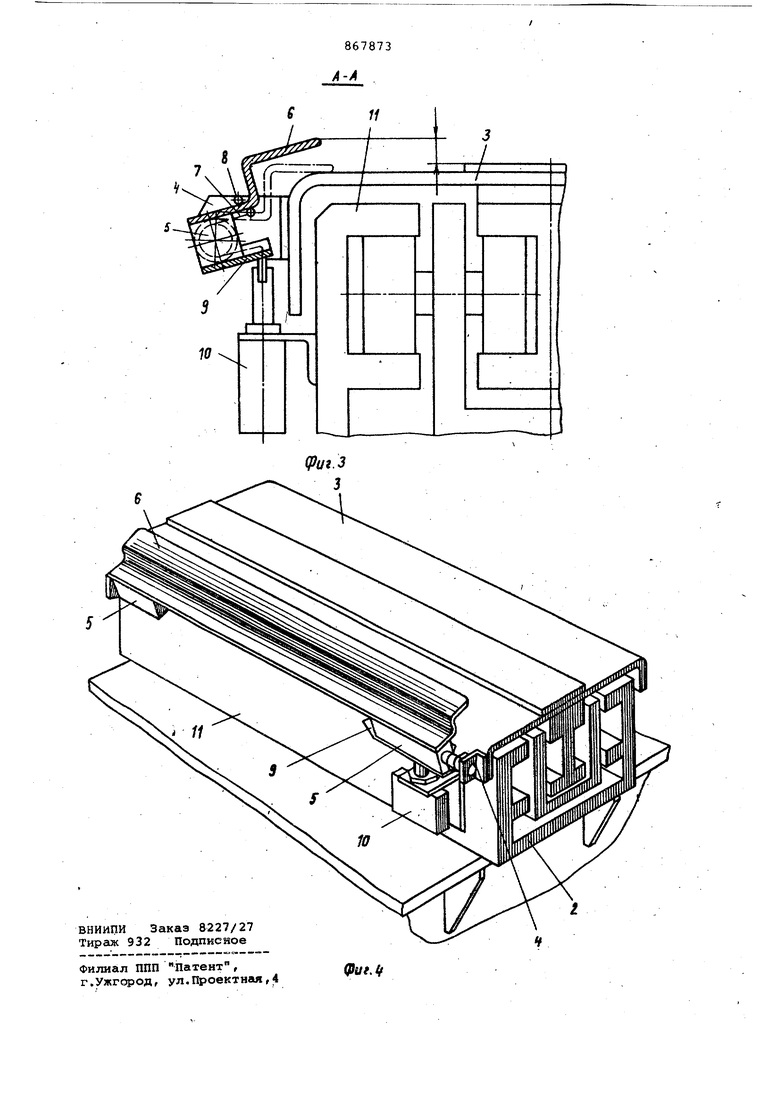
Изобретение относится к промьшленному транспорту, в частности к ; устройствам контроля наличия груза, установленным на грузозахватных органах кранов-штабелеров. Известно устройство контроля наличия груза, установленное на вилочном захвате, представляющее собой 1дуп-датчик, содержащий подпружиненный рычаг, поворотный о т взаимодействия с грузом (поддоном) приблизительйЬ ра 15 в одном направлении и. на 135 8 другом направлении и связанный гиб кой тягой с подпружиненным ползуном, рзаимодействующим с микропереклвзчатёлем 1. Недостатком указанного устройства является наличие электрической связи между подвижными частями. Кроме того, для надежности работы устройства необходимо, чтобы перерабатываемый груз имел плоское ровное дно, что не лсегда достижимо. Известно устройство контроля наличия груза на грузозахватном органе погрузчика,преимущественно телейкопи i ecKOM захвате снеподвижной и подвиж ной секциями,- содержащее закреплен-, МЕЛИ на горизонтальной оси с возможностью поворота подпружиненный рычаг ,и вэаимодействуквдий- с ним датчик 2. Недостатком данного устройства яв.ляются наличие электрической связи (кабельной или др.) между перемещаю1Ф1МИСЯ относительно друг друга частями крана ( грузоподъемника с и .; колонны) , а также приближение точки приложения нагрузки к оси рычага, что значительно снижает надежность работы устройства. Кроме того, при неполном заполнении полки стеллажа устройство может не сработать. Цель изобретения - расширение технологических возможностей, повышение надежности устройства. Указанная цель достигается тем, что ось рычага прикреплена к боковой негрузонесущей стороне выдвижной секции , а датчик закреплен на непо-, движной. секции, при этом , где S - длина выдвижной секции; L - по перечный размеЬ плеча рычага; В продольный размер плеча рычага. На фиг. 1 - изображен кран-штабелер, общий вид на фиг. 2 - предлагаемое устройство, общий вид; на фиг. 3,- разрез А-А на фиг. 2; на фиг.4 -
телескопический захват с установленным йа нем устройством, общий вид.
Устройство установлено на телескопическом захвате 1 грузоподъемной платформы 2 кр5на-штабелера. На верхней подвижной секции 3 телескопического захвата 1 закреп зены кронштейны 4, в которых на горизонтальных осях ,5 установлен рычаг 6. Рычаг 6 поддерживается в исходном положеции при помощи торсионных пружин 7, которое фиксируется упором 8, закрепленным на кронштейне 4. К нижней части рычага б прикреплена линейка 9. При повороте рычага б линейка 9 взаимодействует с коне ным выключателем 10, закрепленным на неподвижной секции 11 телескопического захвата 1. При этом длина выдвижной секции S больше или равна поперечному размеру L плеча рычага, которое больше или равно, размеру плеча рычага, т.е. , что установлено опытным путем.
Устройство работает следующим образом.
Для взятия груза из стеллажа верхняя подвижная секция 3 захвата выдвигается в зону стеллажа таким образом, что рычаг б не касается груза (фиг.2). После выдвижения грузовая платформа 2 с установленными на ней телескопическими захватами 1 приподнимается и груз устанавливается на верхней секции. При этом нижняя поверхность груза взаимодействуете рычагом 6, заставляя его поворйчиваться на осях 5. При этом линейка 9 поворачивается и при возвращении секции 3 телескопического за- хвата 1в нейтральное положение взаимод.ействует с конечным выключателем 10, установленным на неподвижной секции 11, который подаёт сигнал о наличии груза в систему управления.
Предлагаемое устройство позволяет расширить функциональные возможности и повысить надежность работы системы автоматического управления кранаштабелера, т.е. обнаружить наличие J груза на платформе независимо от
его конфигурации и размера. Кроме того, рычаг исключает возможность заклинивания.
Устройство может быть использовано в кране-штабелерё для длинномерных грузов, который может перерабатывать как пачки, так и отдельные бруски. Экономический эффект от внедрения четырех кранов-штабелеров, оснащенных предлагаемым -устройством, составляет 5 1740 тыс. руб.
Формула изобретения
Устройство контроля наличия груза на грузозахватном органе крана-штабелера, преимущественно телескопическом захвате с неподвижной и подвижной секциями, содаржагцее закрепленный на грризонтальной оси с возможностью пов.орЬта подпружиненный рычаг и взаимодействующий с ним датчик, отличающееся тем, что, с целью расширения технологических возможностей и повышения надежности устройства, ось рычага прикреплена к боковой негрузонесущей стороне выдвижной секции, а датчик закреплен на неподвижной секции, при этом ,где
S - длина выдвижной секции; L - поперечный размер плеча;. В - продольный размер плеча рычага.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР (f 227168, кл. В 66 F 9/12, 1968.
2.Патент ФРГ № 1433811, кл. В 66 F 9/24, 1965 (прототип).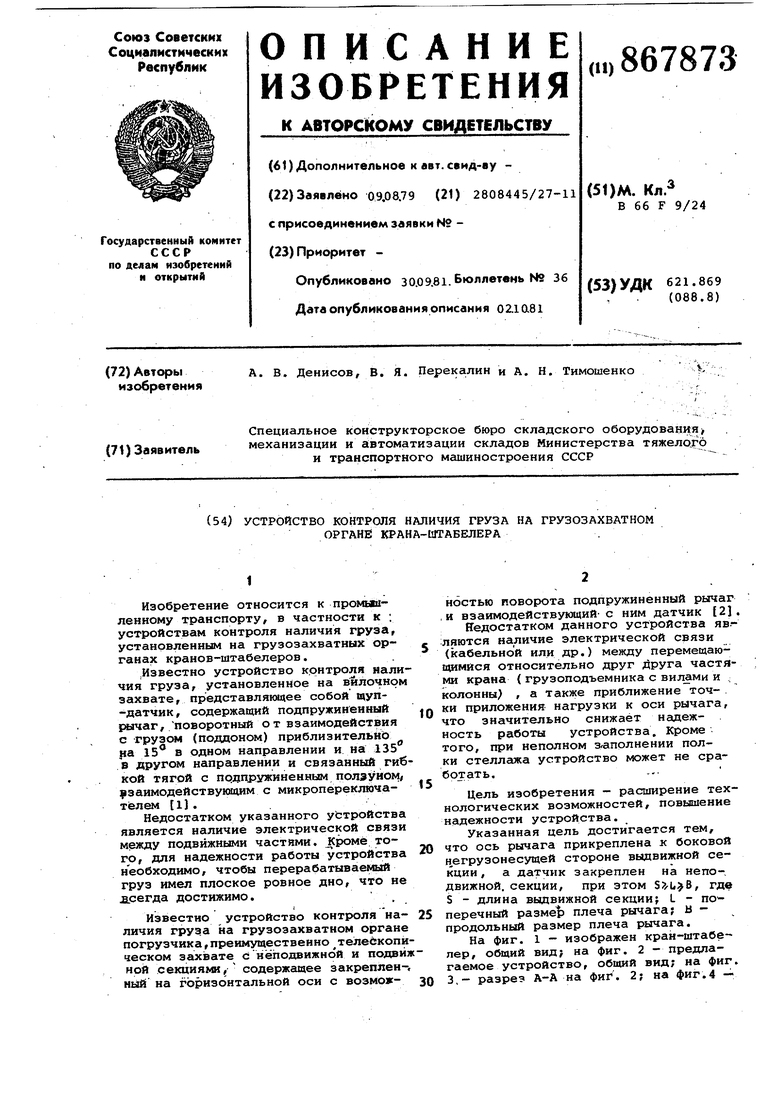
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1594079A1 |
| Телескопический захват для грузоподъемных машин | 1975 |
|
SU649640A1 |
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1974 |
|
SU567648A1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Грузозахватное устройство погрузочно-разгрузочной машины | 1980 |
|
SU870351A1 |
| Устройство для загрузки и разгрузки стеллажей | 1981 |
|
SU977335A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1011468A1 |
| Автоматизированный склад для хранения штучных грузов | 1983 |
|
SU1152890A1 |
Т
иг.2
