I
Изобретение относится к промышлен ному транспорту, к конструкциям грузоподъемных площадок кранов-штабеле- ров, а именно к устройствам для управления приводом телескопического захвата.
Цель Изобретения - повышение удобства при эксплуатации.
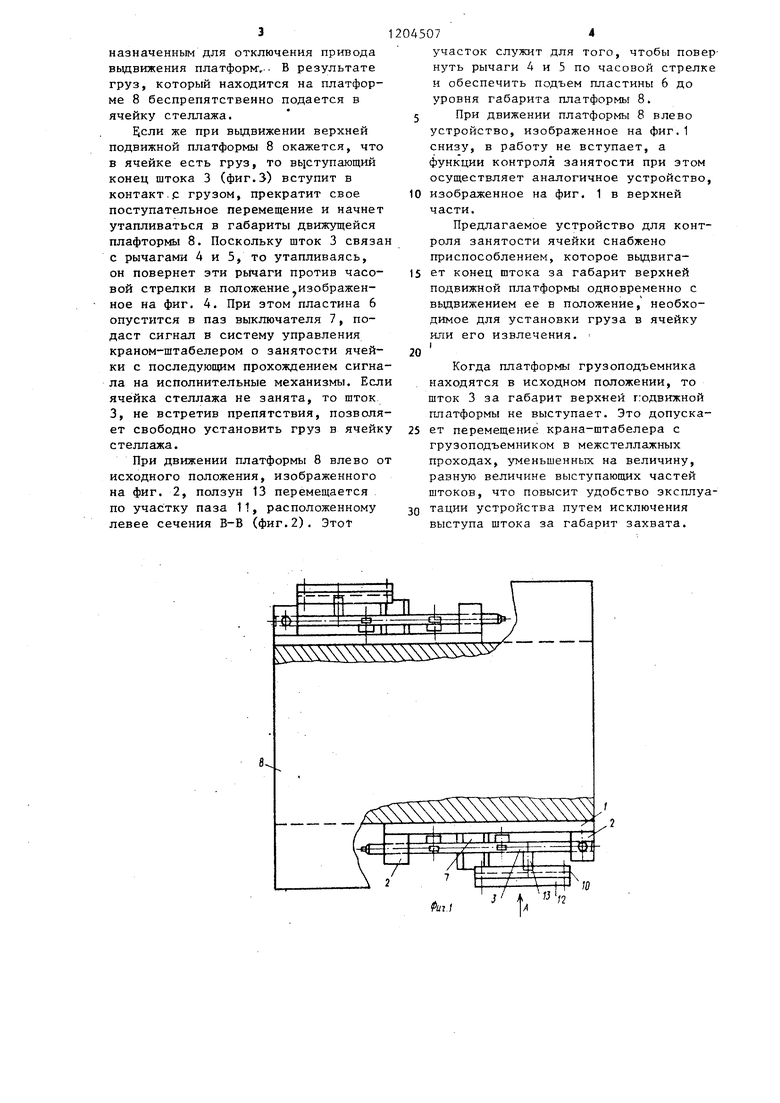
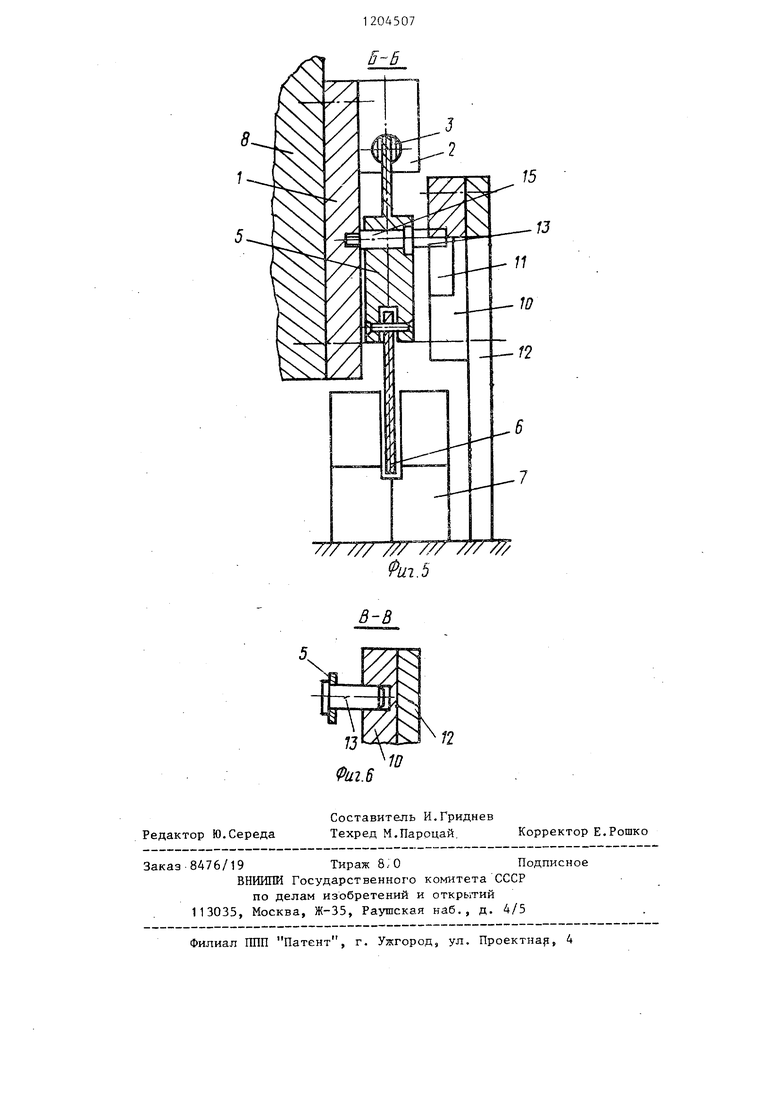
На фиг. 1 изображено предлагаемое устройство (для грузЬподъемника двустороннего действия)S вид в плане, на фиг. 2 - вид устройства по стрелке А на фиг. 1, исходное положение, на фиг. 3 - то же, для случая когда шток полностью выдвинут; на фиг. 4 - то же, когда шток утоштен в результате взаимодействия с препятствием, на фиг, 5 - сечение Б-Б на фиг, 2; на фиг. 6 - сечение В-В на фиг. 2.
Устройство содержит основание 1, выполненное, например, в виде плиты, прикрепленное к грузонесущей платформе захв.ата. На основании 1 в направляющих втулках 2 установлен шток 3, с выступающей частью (фиг.З) Шток 3 кинематически связан посредством углообразных рычагов 4 и 5 с пластиной 6, имеющей возможность для взаимодействия с выключателем 7 привода вьщвижения верхней и промежуточной платформ грузоподъемника (привод выдвижения платформы, а также проьк жуточная и неподвижная платформы грузоподъемника условно .не показаны) .
Основание 1 устройства прикреплено к верхней подвижной платформе 8, например, при помощи винтов 9. Рычаг 5 выполнен трехплечим и кроме наличия кинематической связи со штоком 3 и пластиной 6, дополнительно кинема.тически связан с неподвижной частью грузоподъемника. Эта связь осуществляется при помощи неподвижного копира 10 с направляющим пазом 11. Копир 10 установлен на неподвижной платформе грузоподъемника при помощи кронштейна 12. В пазу 11 расположен ползун 13, выполнен:яый например в виде ролика и прикрепленный к третьему плечу углообразного рычага 5.
Для удержания штока 3 от самопроизвольного перемещения он снабжен подпружиненным фиксатором 14. Паз 11 имеет профиль, обеспечивающий управление штоком 3, при перемеще04507 2
HMV , верхней подвижной платформы 8 грузоподъемника к.ак вправо, так и влево от исходного положения, что необходимо для обеспечения двухсто- 5 роннего обслуживания стеллажей,
расположенных по обе стороны грузоподъемника. Один из вариантов профиля паза изображен пунктиром (фиг.2-4). На фиг. 5 позицией 15 10 обозначена ось рычага 5.
Устройство работает следующим образом.
Стеллажный кран-штабелер с грузом, установленным на верхней подвижной платформе 8 (на чертежах груз условно не показан) грузоподъемника при подходе к ячейке стеллажа, включает привод выдвижения платформ грузоподъемника (привод грузоподъемника на чертежах условно не показан). Верхняя подвижная платформа 8 с грузом начинает вьщвиже- ние в направлении стрелки Г (фиг..3)1 Одновременно с выдвижением верхней подвижной платформы 8 выдвигается шток 3 устройства для контроля занятости .ячейки стеллажа. Это происходит по следующей причине.
Платформа 8 при вьщвижении несет на себе основание 1 устройства для контроля занятости ячейки, а также шток 3, углообразные рычаги 4 и 5 и пластину 6. Основание 1 и шток 3 двигаются вместе с платформой 8 поступательно, а рычаги 4 и 5, связанные одним концом со штоком З.и несущие пластину 6, кроме поступательного перемещения получают вращение вокруг осей 15. Это происходит потому, что рычаг 5, который имеет дополнительное плечо, несущее ползун 13, взаимодействует посредством этого ползуна с пазом 11 неподвижного копира 10. Упомянутое взаимодействие ползуна 13 с пазом 11 на участке, расположенном правее сечения В-В (фиг.2) и наклоненным вниз, приводит к повороту рычага 5 по часовой стрелке и к выдвижению штока 3. Вместе с рычагом 5 посредством штока 3 синхронно поворачивается рычаг 4. В результате поворота рычагов 4 и 5 пластина 6 приподнимается, и втягивается в габарит платформы В по высоте, заник ая положение, изображенное на фиг. 3. Это позволяет исключить взаимодействие пластины 6 с выключателем 7, предназначенным для отключения привода выдвижения платформ ,.. В результате груз, который находится на платформе 8 беспрепятственно подается в ячейку стеллажа.
сли же при вьщвижении верхней подвижной платформы 8 окажется, что в ячейке есть груз, то вцступающий конец штока 3 (фиг.З) вступит в контакт..с грузом, прекратит свое поступательное перемещение и начнет утапливаться в габариты движущейся плафтормь 8. Поскольку шток 3 связа с рычагами 4 и 5, то утапливаясь, он повернет эти рь1чаги против часовой стрелки в положение изображенное на фиг. 4. При этом пластина 6 опустится в паз выключателя 7, подаст сигнал в систему управления краном-штабелером о занятости ячейки с последующим прохождением сигнала на исполнительные механизмы. Если ячейка стеллажа не занята, то шток 3, не встретив препятствия, позволяет свободно установить груз в ячейку стеллажа.
При движении платформы 8 влево от исходного положения, изображенного на фиг. 2, ползун 13 перемещается по участку паза 11, расположенному левее сечения В-В (фиг.2). Этот
2045074
участок служит для того, чтобы повернуть рычаги 4 и 5 по часовой стрелке и обеспечить подъем пластины 6 до уровня габарита платформы В. 5 При движении платформы 8 влево устройство, изображенное на фиг.1 снизу, в работу не вступает, а функции контроля занятости при этом осуществляет аналогичное устройство, 10 изображенное на фиг. 1 в верхней части.
Предлагаемое устройство для контроля занятости ячейки снабжено приспособлением, которое вьщвига- 15 ет конец штока за габарит верхней подвижной платформы одновременно с выдвижением ее в положение, необходимое для установки груза в ячейку
или его извлечения.
20
Когда платформы грузоподъемника находятся в исходном положении, то шток 3 за габарит верхней г:одвижной платформы не выступает. Это допуска25 ет перемещение крана-штабелера с грузоподъемником в межстеллажных проходах, уменьшенных на величину, равную величине выступающих частей штоков, что повысит удобство эксплуа30 тации устройства путем исключения вьютупа штока за габарит захвата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1082706A1 |
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1974 |
|
SU567648A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1062138A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1518229A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |

1 / гп ш
} I « И
Фиг.
/7/77//// /// //////
«%2.5
Фиг.6
Редактор Ю,Середа
Составитель И.Гриднев
Техред М.Паррцай. Корректор Е.Рошко
8476/19 Тираж 8;ОПодписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектна, 4
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1974 |
|
SU567648A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
