Изобретение относится к средствам механизации погрузочно-разгрузочных работ.
Р1звестны краны-штабелеры, содержащие грузозахватную каретку и телескопическую колонну, состоящую из секций с направляющими вдоль их оси и направляющих роликов с опорами. В таких кранах грузозахватная каретка поднимается или опускается не на всю длину колонны, что снижает эксплуатационные возможности и увеличивает габарит крана.
Предлагаемый кран-щтабелер отличается от известных тем, что на колонне смонтировано стопорное устройство, выполненное в виде двуплечего рычага, взаимодействующего с подпружиненными упорами и опорными роликами, установленными на неподвижной секции, при движении грузозахватной каретки и с жесткими упорами и опорными роликами, установленными на каретке, при движении подвижной секции.
Оси направляющих роликов могут быть смонтированы в наклонных пазах опор, закрепленных на каретке и секциях.
Эти отличия обеспечивают повыщение производительности и расщирение диапазона действия.
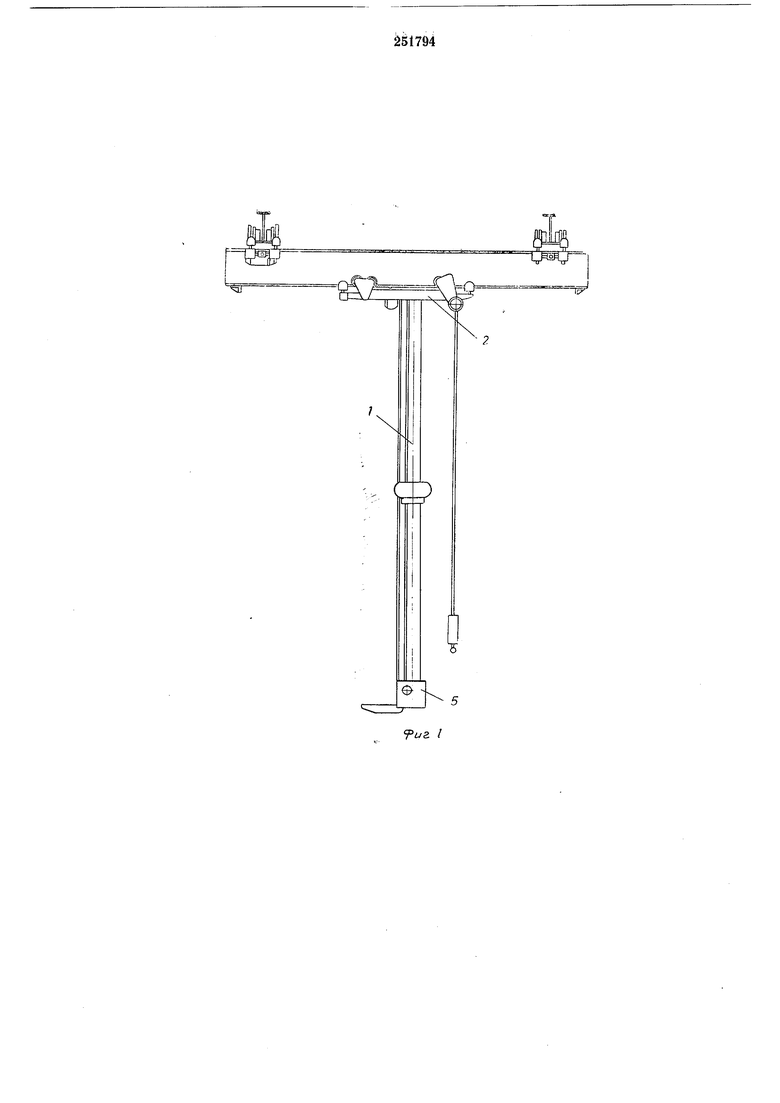
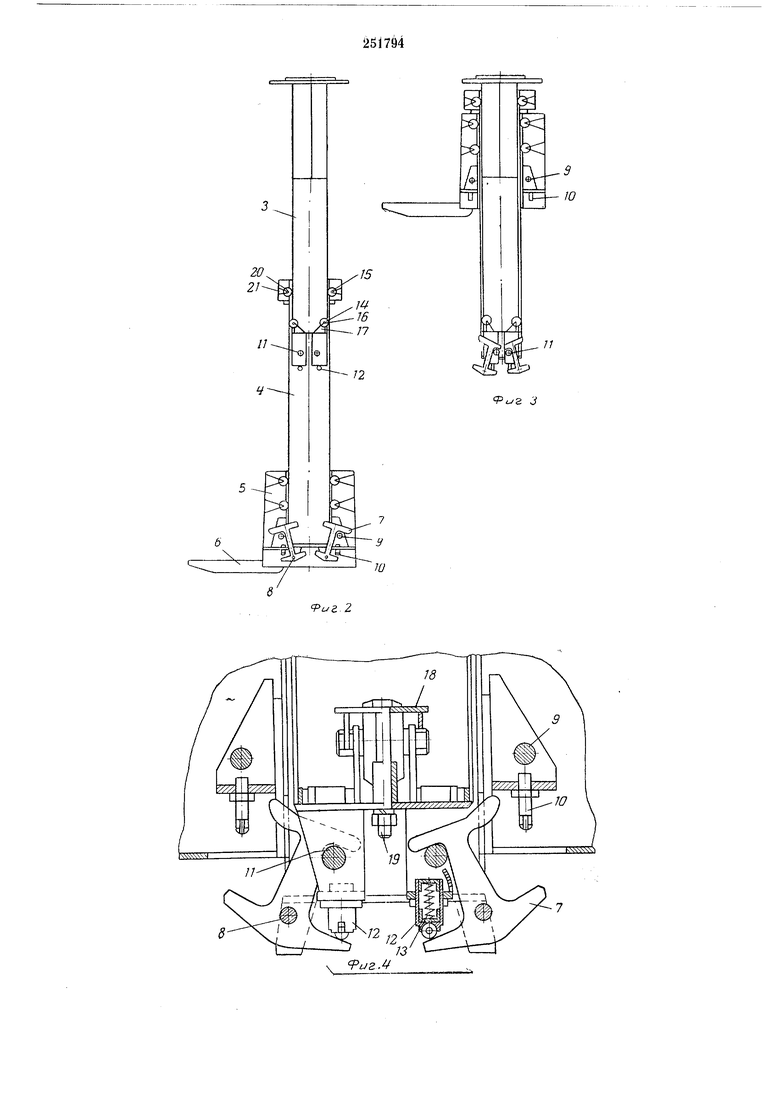
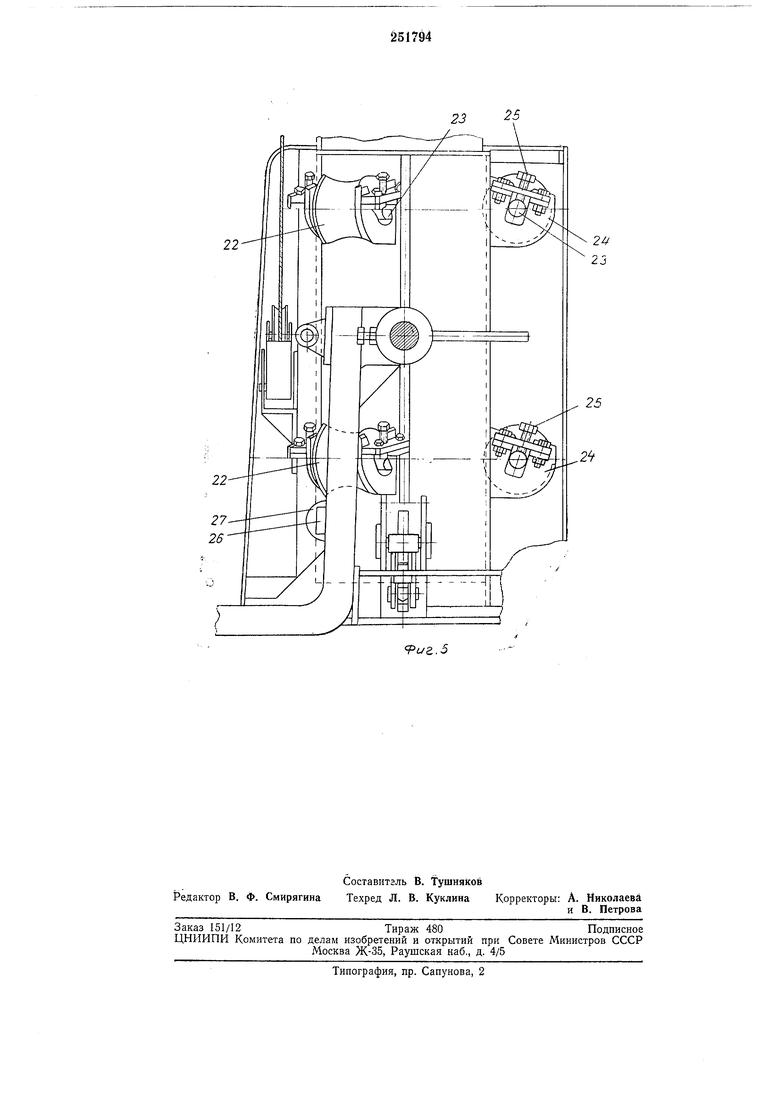
колонна с вдвинутой подвижной секцией; ла фиг. 4 - стопорение подвижной секции с неподвижной; на фиг. 5 - расположение направляющих роликов на каретке.
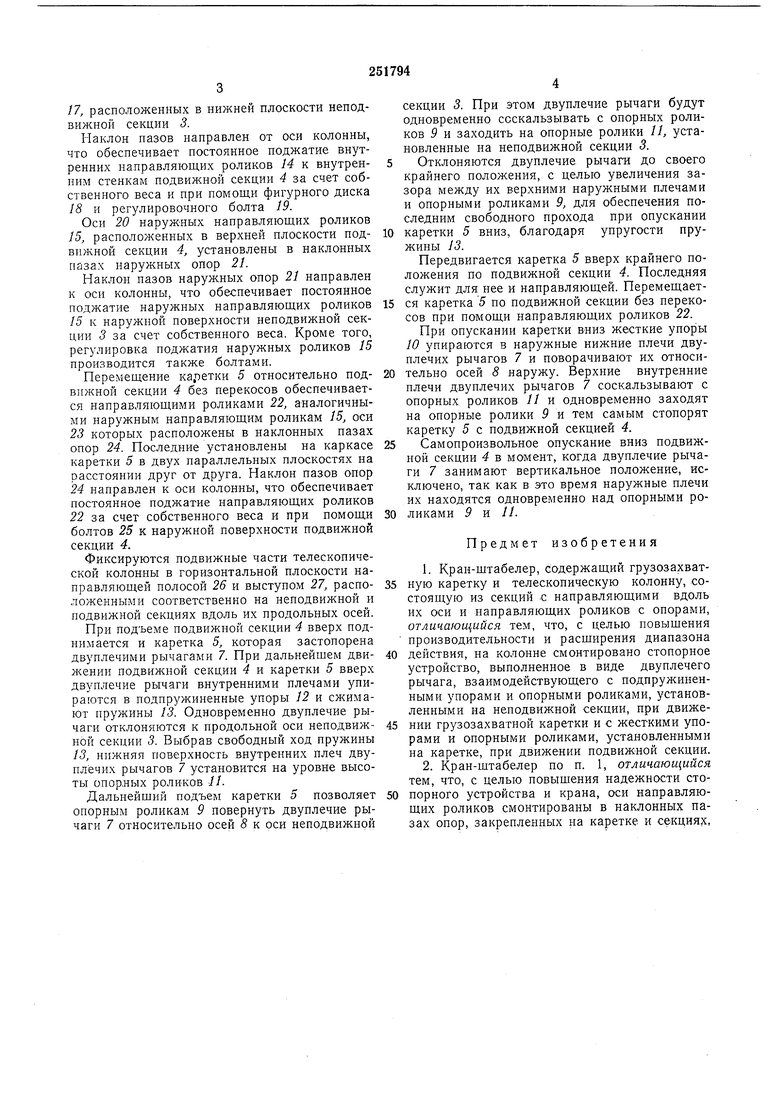
Кран-щтабелер включает в себя телескопическую колонну 1, которая прикреплена к передвижной тележке 2 и состоит из отдельных секций, входящих одна в другую. Неподвижная секция 3 прикреплена к передвижной тележке 2, а подвижная секция 4 перемещается по неподвижной секции вместе с кареткой 5, на которой установлен вилочный захват 6.
Автоматическое стопорное устройство представляет собой систему, состоящую из двуплечих рычагов 7, качающихся в вертикальной плоскости на осях 8, закрепленных на подвижной секции 4, из опорных роликов 9 и жестких регулируемых упоров 10, установленных в нижней плоскости каретки, из опорных роликов //, аналогичных роликам Я регулируемых подпружиненных упоров 12 с пружинами 13, установленных на неподвижной секции 3.
Дви кение подвижных частей {подвижной секции 4 и каретки 5) телескопической колонны без перекосов относительно неподвижной секции 3 обеспечивается внутренними направляющими профильными роликами 14 и наружными направляющими роликами 15. Оси 16 внутренних направляющих роликов 14 уста17, расположенных в нижней плоскости неподвижной секции 3.
Наклон пазов направлен от оси колонны, что обеспечивает постоянное поджатие внутренних направляюш,их роликов 14 к внутренним стенкам подвижной секции 4 за счет собственного веса и при помощи фигурного диска 18 и регулировочного болта 19.
Оси 20 наружных направляющих роликов 15, расположенных в верхней плоскости подвижной секции 4, установлены в наклонных пазах наружных опор 21.
Наклон пазов наружных опор 21 направлен к оси колонны, что обеспечивает постоянное поджатие наружных направляющих роликов 15 к наружной поверхности неподвижной секции 3 за счет собственного веса. Кроме того, регулировка поджатия наружных роликов 15 производится также болтами.
Перемещение ка.оетки 5 относительно подвижной секции 4 без перекосов обеспечивается направляющими роликами 22, аналогичными наружным направляющим роликам 15, оси
23которых расположены в наклонных пазах опор 24. Последние установлены на каркасе каретки 5 в двух параллельных плоскостях на расстоянии друг от друга. Наклон пазов опор
24направлен к оси колонны, что обеспечивает постоянное поджатие направляющих роликов 22 за счет собственного веса и при помощи болтов 25 к наружной поверхности подвижной секции 4.
Фиксируются подвижные части телескопической колонны в горизонтальной плоскости направляющей полосой 26 и выступом 27, расположенными соответственно на неподвижной и подвижной секциях вдоль их продольных осей.
При подъеме подвижной секции 4 вверх поднимается и каретка 5, которая застопорена двуплечими рычагами 7. При дальнейшем движении подвижной секции 4 и каретки 5 вверх двуплечие рычаги внутренними плечами упираются в подпружиненные упоры 12 и сжимают пружины 13. Одновременно двуплечие рычаги отклоняются к продольной оси неподвижной секции 5. Выбрав свободный ход пружины 13, нижняя поверхность внутренних плеч двуплечих рычагов 7 установится на уровне высоты опорлых роликов 11.
Дальнейший подъем каретки 5 позволяет опорным роликам 9 повернуть двуплечие рычаги 7 относительно осей 8 к оси неподвижной
секции 5. При этом двуплечие рычаги будут одновременно соскальзывать с опорных роликов 9 и заходить на опорные ролики //, установленные на неподвижной секции 5. Отклоняются двуплечие рычаги до своего крайнего положения, с целью увеличения зазора между их верхними наружными плечами и опорными роликами 9, для обеспечения последним свободного прохода при опускании
каретки 5 вниз, благодаря упругости пружины 13.
Передвигается каретка 5 вверх крайнего положения по подвижной секции 4. Последняя служит для нее и направляющей. Перемещается каретка 5 по подвижной секции без перекосов при помощи направляющих роликов 22.
При опускании каретки вниз жесткие упоры 10 упираются в наружные нижние плечи двуплечих рычагов 7 и поворачивают их относительно осей 8 наружу. Верхние внутренние плечи двуплечих рычагов 7 соскальзывают с опорных роликов // и одновременно заходят на опорные ролики 9 и тем самым стопорят каретку 5 с подвижной секцией 4.
Самопроизвольное опускание вниз подвижной секции 4 в момент, когда двуплечие рычаги 7 занимают вертикальное положение, исключено, так как в это время наружные плечи их находятся одновременно над опорными роликами 9 vi 11.
Предмет изобретения
1.Кран-штабелер, содержащий грузозахватную каретку и телескопическую колонну, состоящую из секций .с направляющими вдоль их оси и паправляющих роликов с опорами, отличающийся тем, что, с целью повышения производительности и расширения диапазона
действия, на колонне смонтировано стопорное устройство, выполненное в виде двуплечего рычага, взаимодействующего с подпружиненными упорами и опорными роликами, установленными на неподвижной секции, при движеНИИ грузозахватной каретки и с жесткими упорами и опорными роликами, установленными на каретке, при движении подвижной секции.
2.Кран-штабелер по п. 1, отличающийся тем, что, с целью повышения надежности стопорного устройства и крана, оси направляющих роликов смонтированы в наклонных пазах опор, закрепленных на каретке и секциях,
r
iH
| название | год | авторы | номер документа |
|---|---|---|---|
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Автоматизированный склад | 1980 |
|
SU992344A1 |
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Перегрузочное устройство для штучных грузов | 1982 |
|
SU1049392A1 |
| Автоматизированный участок механической обработки корпусных деталей | 1986 |
|
SU1368161A1 |
| Кран-штабелер для загрузки иРАзгРузКи КОНТЕйНЕРОВ | 1978 |
|
SU819016A1 |
| Кран-штабелер | 1983 |
|
SU1134528A1 |
| Кран для погрузочно-разгрузочныхОпЕРАций HA пОдВЕСНОМ КОНВЕйЕРЕ | 1979 |
|
SU806587A1 |
Z{}.
21k.
/4 16 /7
S.
/7
J
22
25
2
.-5
