1
Изобретение относится к области станкостроения, а именно, к автооператорам для подачи изделий с одного рабочего места на другое.
Известен автооператор, предназначенный для нодачи изделий с одного рабочего места на другое, в котором перенос изделия осуществляется механической рукой 1.
Иедостатком указанного автооператора является перенос изделий на незначительные расстояния, ограниченные длиной механической руки, что усложняет конструкцию и снижает надежность.
Иаиболее близким решением из известных к предлагаемому является автооператор, содержащий каретку, установленную на горизонтальной направляющей с возможностью возвратно-поступательного перемещения от бесконечного тягового органа с жестко закрепленным на нем поводком, шарнирно соединенным с ползуном, установленным в направляющей на каретке с возможностью вертикального перемещения и разгрузочного приспособления 2.
Недостаток указанного автооператора заключается в том, что он обеспечивает разгрузку изделий дополнительным приспособлением, имеющим свой привод, вследствие чего усложняется конструкция автооператора и снижается надежность его работы.
Цель изобретения - упрощение конструкции и повышение надежности.
Это достигается тем, что разгрузочное приспособлепие выполнено в виде двуплечего рычага, шарнирно установленного на каретке, а одно из плеч этого рычага кинематически связано с ползуном.
Такое выполнение устройства обеспечивает разгрузку изделий без дополнительного привода, а за счет рабочего и холостого хода каретки, что упрощает конструкцию автооператора и повышает надежность его работы.
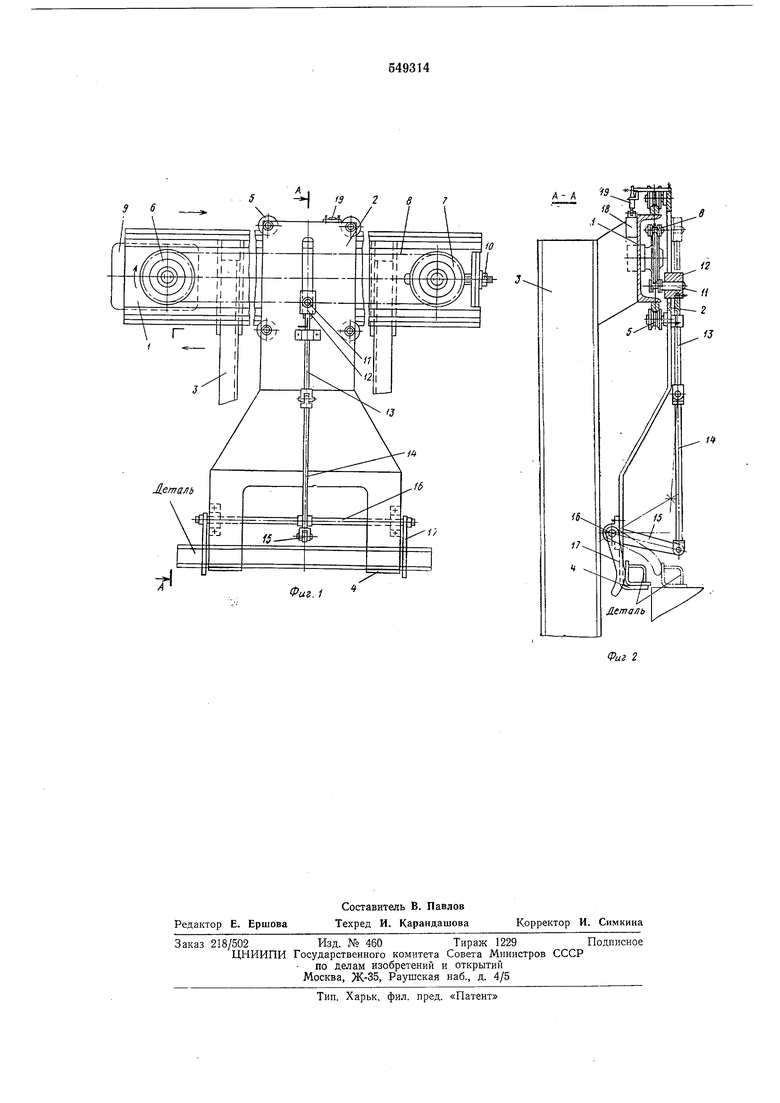
На фиг. 1 изображено предлагаемое устройство, общий вид; на фпг. 2 - разрез А- А фиг. 1.
Автооператор имеет балку / с направляющими для перемещепия каретки 2, смонтированную на двух вертикальных колоннах 3. Ложемент 4 для переносимого изделия выполнен заодно с кареткой. Каретка снабжена четырьмя роликами 5 для ее перемещения по направляющим балки /.
На балке 1 размещена передача с приводпой звездочкой 6, натяжной звездочкой 7 и цепью 8. Соответственно по сторонам балки установлены привод 9 и натяжное устройство W. На цепи закреплеп палец J1, входящий в камень 12, имеющий возможность перемещаться в пазу каретки. Камень через тяги 13 и 14 связан с рычагом 15, установленным на
одной оси 16 с двуплечими рычагами-сталкивателями 17 изделия. Для обеспечения работы оператора в автоматическом режиме на балке установлен конечный выключатель 18, а на каретке установлен упор 19, действующий на конечный выключатель ири проходе его кареткой только со стороны натяжной звездочки 7 и не действующий, на выключатель при нроходе каретки со стороны приводной звездочки 6.
Устройство работает следующим образом.
Каретка 2 находится на исходной позиции - позиции загрузки. Загрузку оператора могут производить любые автоматические устройства, например накопитель, имеющий движение рамы, на которой располагаются детали, состоящее из комбинации возвратно-поступательных движений в вертикальной и горизонтальной плоскостях.
Когда на ложемент 4 уложена деталь, механизм-загрузчик дает команду на включение привода 9.
Привод имеет вращение в одну сторону. Палец //, закрепленный на цепи 8 и воздействующий через камень 12 и паз на каретку, увлекает ее за собой. Палец, подойдя к звездочке 6 (это будет соответствовать позиции разгрузки), начнет ее огибать с цепью и переместится таким образом в вертикальной плоскости на величину диаметра звездочки.
Это перемещение пальца приводит в движение камень в пазу каретки, соответственно перемещение тяг 13 и 14, вызовет поворот рычага 15 и рычагов-сбрасывателей 17, которые сбросят деталь с ложементов каретки 4. Одновременно с переходом пальца на верхнюю ветвь цепи произойдет реверс движения каретки - она пойдет назад к позиции загрузки. При движении назад каретка минует конечный выключатель 18. Упор 19 при ходе назад не действует на выключатель.
Дойдя до звездочки 7, палец вновь перейдет на нижнюю ветвь, рычаги-сталкиватели 17 уйдут за ложемент, ложемент готов принять новую деталь. Одновременно с этим произойдет реверс в движении каретки.
В своем ходе вперед каретка дойдет до позиции загрузки, где будет остановлена конечным выключателем 18 при помощи упора 19. Далее автоматический цикл работы автооператора повторится.
Благодаря использованию движения поводка вверх при огибании цепью звездочки и его перехода с нижней ветви на верхнюю упрощается конструкцня, что в свою очередь повышает надежность работы автооператора.
Формула изобретения
Автооператор, содержащий каретку, установленную на горизонтальной направляющей с возмож юстью возвратно-поступательного перемещения от бесконечного тягового органа с жестко закрепленным на нем поводком, шарнирно соединенным с нолзуном, установленным в направляющей, и разгрузочное приспособление, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, разгрузочное приспособление выполнено в виде- двуплечего рычага, шарнирно установленного на каретке, а одно из плеч этого рычага кинематически связано с ползуном.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 312735, кл. В 23q 7/04, 1963.
2.Дьяченко В. П. «Л ашины непрерывного транспорта, Машгиз, М., 1961, стр. 165,
фиг. 87. - 3 2 в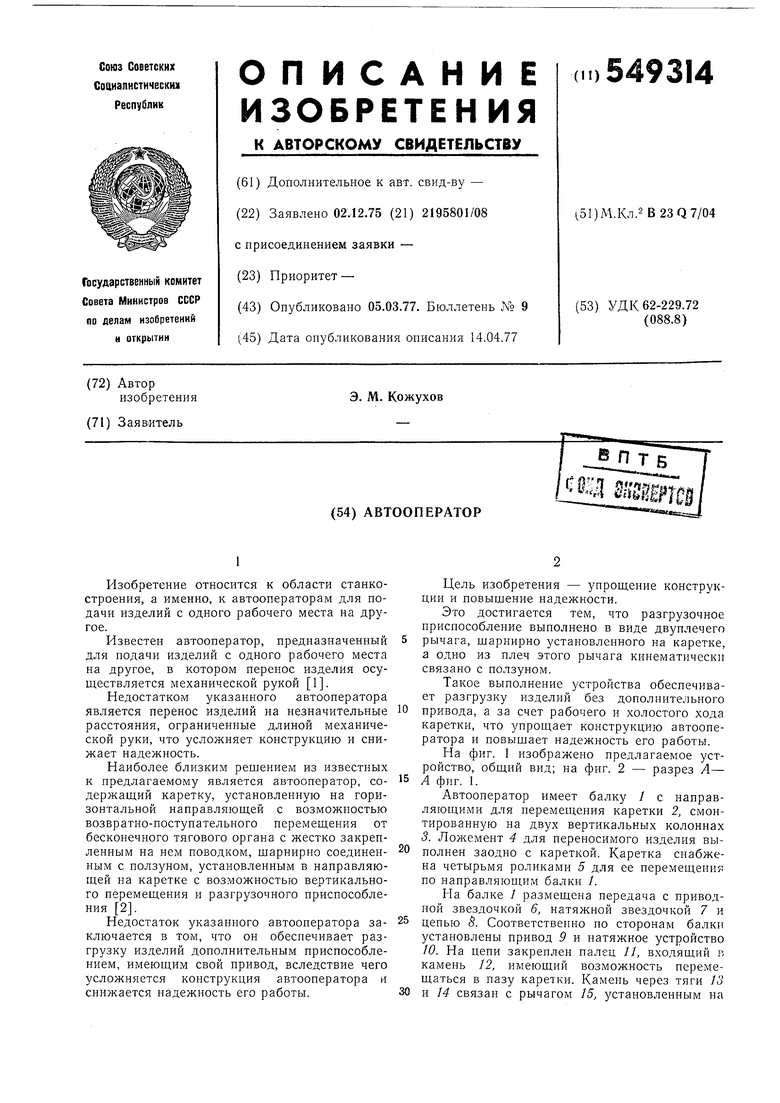
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1988 |
|
SU1616800A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| АГРЕГАТ ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ В ВАННАХ | 1991 |
|
RU2022893C1 |
| Автоматическая линия для гальванической обработки изделий | 1986 |
|
SU1381204A1 |
| Поточная линия для изготовления деталей типа тел вращения | 1980 |
|
SU1016210A1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| Устройство для изготовления ремней | 1990 |
|
SU1715708A1 |
| Транспортная тележка | 1980 |
|
SU882897A1 |
| Устройство для погрузки и разгрузки тары | 1982 |
|
SU1036633A1 |
| КОНВЕЙЕРНАЯ СИСТЕМА ДЛЯ НАКОПЛЕНИЯ ТРАНСПОРТИРОВКИ ЗАКРЕПЛЕННОГО НА ТРОЛЛЕЯХ ШТУЧНОГО ГРУЗА | 1969 |
|
SU241990A1 |