Фиг, 1
рительные приборы 31 и 32. блок 33 селекции, компаратор 34 и индикатор 35. Блок 9 деления содержит ключи ,Ф12и13 низкой частоты, нуль-орган 14, триггер (Т) 15 и элемент 16 задержки. Усиленные усилителями 3 и 4 сигналы с датчиков 1 и 2, пропорциональные скорости движения ленты и обратно пропорциональные расстоянию между датчиком и лентой, через демодуляторы 5 и 6 поступают на входы Ф 7 и 8, где усредняются и затем передаются в блок 9 деления. Сигнал с демодулятора 5 устанавливает Т 15, который управляет работой ключей 10 и 11. Длительность управляющего сигнала 15 определяется элементом 16 задержки. Ключи 10 и 11 связывают выходы
Ф 7 и 8 с входами Ф 12 и 13 во время паузы между сигналами Т 15. Пропорционально увеличению паузы возрастает усредненный сигнал на выходе Ф 12 и 13, и следовательно, оба измерительных канала инвариантны относительно скорости ленты. Сигналы с Ф 12 и 13, прокалиброванные блоками 17 и 18, подаются на входы БС 23 и 24, где вычитаются из постоянного опорного сигнала с источников 27 и 28. Результирующий сигнал через блоки 29 и 30 и блоки 19-22 поступает на БС 26 и 25, которые определяют величину смещения ленты на наружной кромке натяжного барабана. Сигнал максимального смещения ленты формируется в блоке 33 и индицируется индикатором 35. 3 ил.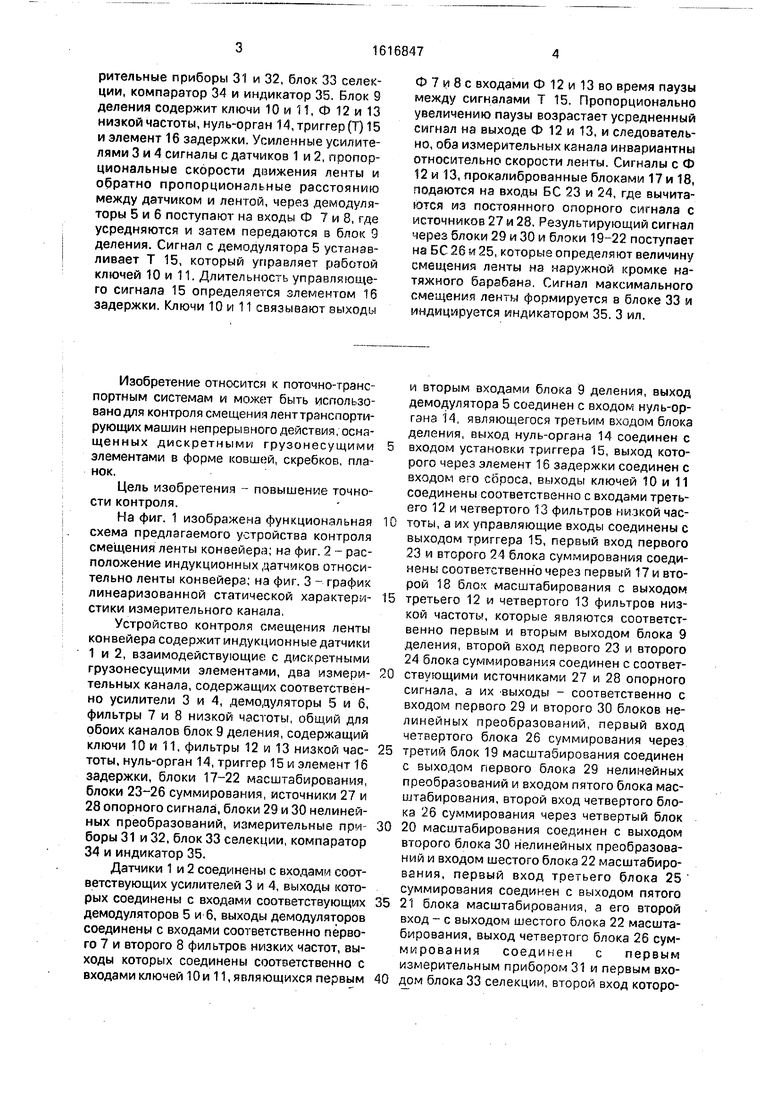



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля смещения ленты конвейера | 1990 |
|
SU1740282A1 |
| Устройство контроля скорости ленты конвейера | 1989 |
|
SU1752687A1 |
| Устройство контроля колебаний ленты вертикального ленточного конвейера | 1989 |
|
SU1676953A1 |
| Устройство контроля работоспособности ленточного конвейера | 1989 |
|
SU1759758A1 |
| Способ контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1685834A1 |
| Способ контроля работоспособности ленточного конвейера и устройство для его осуществления | 1988 |
|
SU1555240A1 |
| Устройство контроля грузонесущей способности конвейера | 1989 |
|
SU1752688A1 |
| Устройство контроля грузонесущей способности ленточного конвейера | 1989 |
|
SU1680603A1 |
| Устройство для обнаружения повреждений короткозамкнутого ротора асинхронного двигателя | 1984 |
|
SU1182447A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1987 |
|
SU1479394A1 |

Изобретение относится к поточно-транспортным системам и предназначено для контроля смещения лент транспортирующих машин непрерывного действия. Цель - повышение точности контроля. Устройство содержит индукционные датчики 1 и 2, взаимодействующие с дискретными грузонесущими элементами, и два измерительных канала. Каждый из них содержит последовательно соединенные усилители 3, 4, демодуляторы 5 и 6, фильтры (Ф) 7 и 8 низкой частоты и блок 9 деления (общий для обоих каналов), блоки 17-22 масштабирования, блоки суммирования (БС) 23 и 26, источники 27, 28 опорного сигнала, блоки 29, 30 нелинейных преобразований, измерительные приборы 31, 32, блок 33 селекции, компаратор 34 и индикатор 35. Блок 9 деления содержит ключи 10, 11, Ф 12 и 13 низкой частоты, нуль-орган 14, триггер (Т) 15 и элемент 16 задержки. Усиленные усилителями 3 и 4 сигналы с датчиков 1 и 2, пропорциональные скорости движения ленты и обратно пропорциональные расстоянию между датчиком и лентой, через демодуляторы 5 и 6 поступают на входы Ф 7 и 8, где усредняются и затем передаются в блок 9 деления. Сигнал с демодулятора 5 устанавливает Т 15, который управляет работой ключей 10 и 11. Длительность управляющего сигнала 15 определяется элементом 16 задержки. Ключи 10 и 11 связывают выходы Ф 7 и 8 с входами Ф 12 и 13 во время паузы между сигналами Т 15. Пропорционально увеличению паузы возрастает усредненный сигнал на выходе Ф 12 и 13 и следовательно оба измерительных канала инвариантны относительно скорости ленты. Сигналы с Ф 12 и 13, прокалиброванные блоками 17 и 18, подаются на входы БС 23 и 24, где вычитаются из постоянного опорного сигнала с источников 27 и 28. Результирующий сигнал через блоки 29, 30 и блоки 19-22 поступает на БС 26 и 25, которые определяют величину смещения ленты на наружной кромке натяжного барабана. Сигнал максимального смещения ленты формируется в блоке 33 и индицируется индикатором 35. 3 ил.
Изобретение относится к поточно-транспортным системам и может быть использовано для контроля смещения лент транспортирующих машин непрерывного действия, осна- щенных дискретными грузонесущими 5 элементами в форме ковшей, скребков, планок.
Цель изобретения - повышение точности контроля.
На фиг. 1 изображена функциональная 10 схема предлагаемого устройства контроля смещения ленты конвейера; на фиг. 2 - расположение индукционных ,цатч /1ков относительно ленты конвейера; на фиг. 3 - график линеаризованной статической характера- 15 стики измерительного канала,
Устройство контроля смещения ленты конвейера содержит индукционные датчики 1 и 2, взаимодействующие с дискретными грузонесущими элементами, два измери- 20 тельных канала, содержащих соответственно усилители 3 и 4, демодуляторы 5 и 6, фильтры 7 и 8 низкой частоты, общий для обоих каналов блок 9 деления, содержащий ключи 10 и 11, фильтры 12 и 13 низкой час- 25 тоты. нуль-орган 14, триггер 15 и элемент 16 задержки, блоки 17-22 масштабирования, блоки 23-26 суммирования, источники 27 и 28 опорного сигнала, блоки 29 и 30 нелинейных преобразований, измерительные при 30 боры 31 и 32, блок 33 селекции, компаратор 34 и индикатор 35.
Датчики 1 и 2 соединены с входами соответствующих усилителей 3 и 4, выходы которых соединены с входами соответствующих 35 демодуляторов 5 и 6, выходы демодуляторов соединены с входами соответственно первого 7 и второго 8 фильтров низких частот, выходы которых соединены соответственно с входами ключей 10 и 11, являющихся первым 40
и вторым входами блока 9 деления, выход демодулятора 5 соединен с входом нуль-ор- гэна 14, являющегося третьим входом блока деления, выход нуль-органа 14 соединен с входом установки триггера 15, выход которого через элемент 16 задержки соединен с входом его сброса, выходы ключей 10 и 11 соединены соответственно с входами третьего 12 и четвертого 13 фильтров низкой частоты, а их управляющие входы соединены с выходом триггера 15, первый вход первого
23и второго 24 блока суммирования соединены соответственно через первый 17 и второй 18 блох масштабирования с выходом третьего 12 и четвертого 13 фильтров низкой частоты, которые являются соответственно первым и вторым выходом блока 9 деления, второй вход первого 23 и второго
24блока суммирования соединен с соответствующими источниками 27 и 28 опорного сигнала, а их -выходы - соответственно с входом первого 29 и второго 30 блоков нелинейных преобразований, первый вход четвертого блока 26 суммирования через третий блок 19 масштабирования соединен с выходом первого блока 29 нелинейных преобразований и входом пятого блока масштабирования, второй вход четвертого блока 26 суммирования через четвертый блок
20масштабирования соединен с выходом второго блока 30 нелинейных преобразований и входом шестого блока 22 масштабирования, первый вход третьего блока 25 суммирования соединен с выходом пятого
21блока масштабирования, а его второй вход - с выходом шестого блока 22 масштабирования, выход четвертого блока 26 суммирования соединен с первым измерительным прибором 31 и первым входом блока 33 селекции, второй вход которого соединен с выходом третьего блока 25 суммирования и вторым измерительным прибором 32, выход блока 33 селекции через компаратор 34 соединен с индикатором 35.
Уcтpoйctвo работает следующим образом.
При движении ленты конвейера индукционные датчики 1 и 2 поступают во взаимодей- ствие с дискретными груяонесущими элементами и генерируют пульсирующие аналоговые сигналы, амплитуда которых пропорциональна скорости движения ленты и обратно пропорциональна расстоянию между датчиком и лентой. Усиленные усилителями 3 и 4 сигналы подаются на демодуляторы 5 и б, пройдя операцию однополупериодного выпрямления, поступают на вход соотзетствен- но фильтра 7 и 8 низких частот, которые осуществляют операцию их усреднения.
Аналоговые сигналы в виде напряжения U{t) постоянного тока на выходе фильтров 7 и 8 низкой частоты представляют функцию двух переменных величин; смещения дм скорости V ленты
U{t) (t);V(t). Параметр V const характеризует пределы пропорциональности сигналов датчиков от изменения величины смещения д . Уравнение статической хар:; ктеристики измерительной цепи датчик - фильтр низкой частоты для зоны пропорциональности имеет вид
и Kj( V ) б-Ь 0,5 и ( V ) , где Kf(V)-коэффициент пропорциональности при значении скорости ленты, равном V; умакс У - максимально возможный сигнал на выходе фильтра низкой частоты при изменении смещений ленты,
Поскольку коэффициент пропорциональности K(V) является переменной величиной И зааисит от скорости V ленты (уменьшается при ее снижении), то это означает, что в измерительных цепях обоих датчиков возникает мультипликативная погрешность, обусловленная нестабильностью скорости ленты, которая на практике может быть весьма значительной: скорость ленты может снижаться в некоторых случаях до 20% от номинальной величины. Пренебрежение зависимостью изменения величины г-К ji от скорости V снижзет точность измерения. Для устранения мультипликативной погрешности измерения смещения ленты необходимо осуществлять операцию деления выходных сигналов U7(t) и U8(t) фильтров 7 и 8 низкой частоты на текущую величину скорости V. Применять для этой цепи типовый блок деления в дан0
5
0
5
0
5
0
5
0
5
ном устройстве нецелесообразно по двум причинам, а именно ввиду сложности этих блоков и значительной погрешности выполнения ими операции деления. Функцию деления 3 данном устройстве можно реализоеать более простыми техническими средствами, а именно посредством применения элементов разрывающих цепи сигна- лоз, формируемых фильтрами 7 и 8 низкой частоты на период времени, пропорциональный скорости ленты. При этом эквивалентный уровень сигналов в цепях за этими злемектам1 , в качестве которых применены ключи 10 и 11, уменьшается прямо пропорционально времени разомкнутого состояния ключей по отношению к времени полупериода изменения сигналов датчиков. Длина этого полупериода обратно пропорциональна скорости ленты,поскольку определяется временем взаимодействия д1-1скретного грузонесущего органа с индукционным датчиком. Переменная составляющая сигналов, которая возникает ввиду коммутирования цепей ключами 10 и 11, устраняется фильтрами 12 и 13 низкой частоты.
Для выполнения операции деления, необходимой для устранения мультипликативной погрешности изменения смещения ленты, в предлагаемое устройство введен блок 9 деления, содержащий, кзк уже отмечалось два фильтра 12 и 13 низкой частоты, которые соответственно через ключи 10 и 11 соединеяы с фильтрами 7 и 8 низкой частоты. Блок деления содержит также нуль-орган 14 триггер 15 и элемент 16 задержки. При появлении выходного сигнала демодулятора 5 срабатывает нуль-орган и гк.редним фронтом своего сигнала устанавливает триггер 15, сиг- нал. которого управляет работой ключей 10 и 11, Длительность управляющего сигнала триггера т const определяется элементом 16 задержки, выходной сигнал которого сбрасывает триггер, причем длительность управляющего сигнала триггера должна быть меньше полупер1 Юда сигнала датчика при максимальной скорости ленты. Ключи 10 и 11 связывают выходы ф1 льтров 7 и 8 с входами фильтров 12 и 13 во время паузы между сигналами триггера. При наличии сигнала триггера, в течение интервала времени Ту , фильтры 12 и 13 отключены от фильтров 7 и 8. что. приводит к снижению сигналов-на вихсде фильтров 12 и 13. Чем меньше скорость движения ленты, тем паузы Тп Va между импульсами триггера более продол- мсгтельны и значит пропорциональны увеличению паузы Гп , возрастает усредненнцй сигнал на выходе фильтров 12 и 13 и, следовательно, оба измерительных канала мнва- относительно скорости ленты. В целом статическая характеристика датчика является нелинейной, а между смещенмем (5 ленты и сигналами фильтров 12 и 13 низ- кой частоты нет прямо пропорциональной зависимости. Форма характеристики зависит от типа примеи)1емого датчика. Нелинейность статической характеристики снижает точность измерения смеа1ения д ленты. С целью повышения точности необходимо расширение пределов пропорциональности статической характер-йстикк. Это может быть обеспечено применением в обоих измерительных каналах блоков нел.кейных преобразований, которые настроены для выполнения операции линеаризации статической характеристики. Прокалиброванные блоками 17 и 18 масштабирования с1/ гналы фильтров 12 и 13 подаются на вход соотвэт- ственно блоков 23 и 24 суммирования, которые осуществляют вычитание мх мз постоянного опорного сигнала, формкруе ло- го соответственно источниками 27 и 28 опорного сигнала и которые приняты такси
величины, чтобы обеспечивалось прохожде- ние статической характеристики U г (;р((5)(кр1/1вая 1 на фиг.3) через качало координат. Следов ательно, при отсутствии смешения ленты ( 6 0), на выходе блоков 23 г 24 суммирования сигналы равны нулю., яр-л этом необходимая для калибровки E i3;vjepi«- тельного канала крутизна статической характеристики (коэффиц /1ект передачи) обеспечивается соответствуюьцей настрой- кой блоков 17 и 18 масштабирования. Га как и (р(д) - нелинейная функцг я, э требуется чтобы U К 5- б (кривая 2 на , 3); то статическая характера/готика блоков 29 и 30 нелинейных г.реобразованяй,. гггзсколь- ку
(u )u f(u )(a) Kef б
должна иметь вид
f(u )- 44.
и - напряжение на выходе блока нелинейных преобразований, Форма статической характеристики f(u ) блока нелинейных преобразований показана штриховой линией 3 на фиг. 3, которая су- щественно увеличивает зону пропорциональности статической характеристики u К J (5 измерительной цепи датчик-выход блока нелинейных преобразований .
Сигнал блока 29 нелинейных преобразований масштабируется блоками 19 и 21 масштабирования, а блока 30 нелинейных преобразований - блоками 20 и 22 масшта
бирования. Блок 19 масштабирования изменяет входной сигнал в Ki раз
к, - Y2 - Уз
а блок 20 масштабирования изменяет входной сигнал в Кг раз
К,-Уз-vi
У2 -Yi
Блок 21 масштабирования меняет входной
сигнал в Кз раз
Кз
. V2 Y2 - YI
а блок 22 масштабирования изменяет входной сигнал в К раз
Смгнэлы блоков 19 и 20 масштабирования суммируются блоком 26 суммирования, а блох 25 суммирования осуществляет вычитание В13 сигнала блока 2t масштабирования сигнала блока 22 масштабирования. Следовательно, сигнал на выходе блока 26 сумм::лрования определяет величину смещения ленть по наружной кромке приводного барабана, а сигнал на выходе блока 25 сум- миройзния определяет величину смещения ленты по наружной кромке натяжного бара- бэна. Сигналы блоков 26 и 25 суммирования (Юдаются на вход измерительных приборов 31 и 32 соответстаенно, а также на входы бгюка 33 селекции, который выделяет наибольший из них по модулю и затем подает его на вход компаратора 34. При достиже- НИИ сигналом на выходе блока селекции предельно допустимого значения (порога срабатывания), определяющего максимально допустимое смещение ленты относительно в.чешней кромки барабанов, компаратор формирует выходной сигнал, который индицируется индикатором 35. Кроме того, этот сигнал гложет быть использован для управления устройством смещения ленты либо для автоматического отключения конвейера,
Использование предлагаемого устройства позволяет исключить сход ленты кон-. вейера, повысить устойчивость работы конвейерных систем, уменьшить зксплуата- ционные расходы, связанные с восстановлением ленточного конвейера и уборкой транспортируемого материа/ш. Кроме того, использование устройства как датчика смещения позволяет снизить расходы, связанные с получением информации для автоматической системы регулирования смещения ленты.
Формула изобретения
Устройство контроля смещения ленты конвейера, содержащее первый датчик взаимодействия с грузонесущим органом/первый источник опорного сигнала, элемент задержки, первый блок масштабирования, первый и второй фильтры низкой частоты, два измерительных блока и компаратор, отличающееся тем что, с целью повышения точности измерения за счет определения величины и направления смещения, оно снабжено вто- рым датчиком взаимодействия с грузонесущим органом, двумя усилителями, двумя демодуляторами, третьим и четвертым фильтрами низких частот, двумя ключами, триггером, нуль-органом, дополнительно шестью блоками масштабирования, вторым источником опорного сигнала, четырьмя сумматорами, двумя блоками нелинейных преобразований, блоком селекции и индикатором, при этом выход первого датчика взаи- модействия с грузонесущим органом соединен через последбвательно соединенные первый усилитель и первый демодулятор с входом первого фильтра низких частот непосредственно и через нуль-орган - с одним входом триггера, выход которого подключен К первым входам обоих ключей непосредственно и через элемент задержки - к своему другому входу, выход второго датчика взаимодействия с грузонесущим органом соединен через последовательно связанные второй уг.илитель, второй демодулятор, второй фильтр низких частот с вторым входом первого ключа, выход первого фильтра низких частот соединен с вторым входом второго ключа, выход которого связан через последовательно соединенные третий фильтр низких частот и первый блок масштабирования с одним входом первого сумматора, к другому входу которого подключен первый источник опорного сигнала, выход первого сумматора соединен через первый блок нелинейных преобразований с входами второго и третьего блоков масштабирования, выход первого ключа соединен через последовательно связанные четвертый фильтр нкзких частот и четвертый блок масштабирования с одним входом второго сумматора, к другому входу которого подключен второй источник опорного сигнала, выход второго сумматора связан через второй блок нелинейных преобразований с входами пятого и шестого блоков масштабирования, выходы второго м пятого блоков масштабирования подключены к соответствующим входам третьего сумматора, а выходы третьего и шестого блоков масштабирования подключены к соответствующим входам четвертого сумматора, выходы третьего и четвертого сумматоров соединены с соответствующими ускорительными блоками и с входами блока селекции, выход которого черёа компаратор подключен к индикатору.
2
X (ц (/сУ;
иг.5
| Лазуткин Н.Я | |||
| и др | |||
| Автоматизация конвейерного транспорта на угольных шахтах | |||
| М.: ЦНИЭуголь, 1975, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Устройство контроля скорости и проскальзывания ленты конвейера | 1987 |
|
SU1479394A1 |
| кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
