Изобретение относится к сельскохозяйственному машиностроению, в частности к транспортирующим механизмам.
Цель изобретения - упрощение конструкции и повышение эксплуатационной надежности.
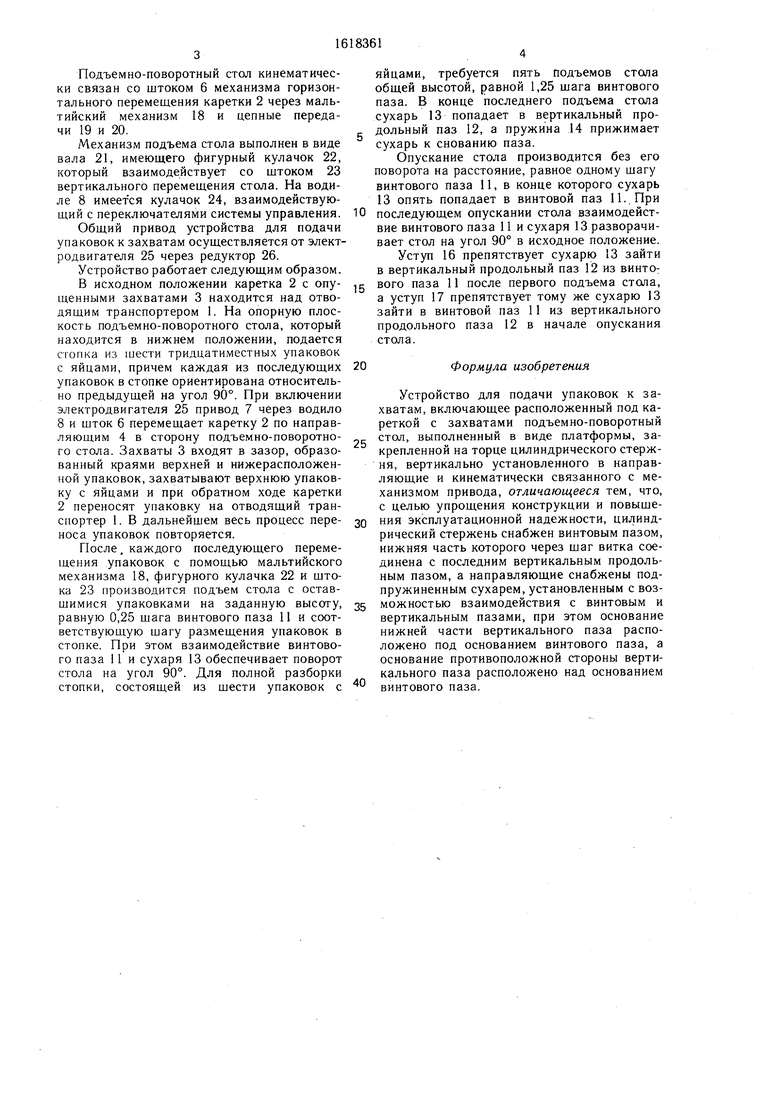
На фиг. 1 изображено устройство для подачи упаковок к захватам, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Устройство для подачи упаковок к захватам включает отводящий транспортер 1, каретку 2 с захватами 3, установленную с возможностью возвратно-поступательного перемещения на направляющих 4. Захваты 3 закреплены на зубчатой рейке 5 механизма вертикального перемещения захватов, которая кинематически связана с механизмом горизонтального перемещения каретки 2, выполненным в виде штока 6, связанного с приводом 7 посредством водила 8, с возможностью возвратно-поступательного перемещения.
Под направляющими 4 размещен подъемно-поворотный стол, выполненный в виде цилиндрического стержня 9, установленного вертикально в направляющих 10 с возможностью возвратно-поступательного и вращательного перемещения. Цилиндрический стержень 9 имеет винтовой 11 и вертикально-продольный -12 пазы, для размещения сухаря 13, подпружиненного пружиной 14 и установленного в направляющих 10. Пружина 14 зафиксирована регулировочным винтом 15. Вертикальный продольный паз 12 имеет неравномерную по длине глубину, в нижней части большую, а в верхней меньшую, чем глубина винтового паза, а их основания образуют в местах соединения уступы 16 и 17.
О5
00 ОЭ
сэ
Подъемно-поворотный стол кинематически связан со штоком 6 механизма горизонтального перемещения каретки 2 через мальтийский механизм 18 и цепные передачи 19 и 20.
Механизм подъема стола выполнен в виде вала 21, имеющего фигурный кулачок 22, который взаимодействует со штоком 23 вертикального перемещения стола. На води- ле 8 имеется кулачок 24, взаимодействуюяйцами, требуется пять подъемов стола общей высотой, равной 1,25 шага винтового паза. В конце последнего подъема стола сухарь 13 попадает в вертикальный продольный паз 12, а пружина 14 прижимает сухарь к снованию паза.
Опускание стола производится без его поворота на расстояние, равное одному шагу винтового паза 11, в конце которого сухарь 13 опять попадает в винтовой паз И. При
щий с переключателями системы управления. 10 последующем опускании стола взаимодейст- Общий привод устройства для подачивие винтового паза 11 и сухаря 13 разворачи- упаковок к захватам осуществляется от электродвигателя 25 через редуктор 26.
Устройство работает следующим образом.
вает стол на угол 90° в исходное положение. Уступ 16 препятствует сухарю 13 зайти в вертикальный продольный паз 12 из винто:
В исходном положении каретка 2 с опу- ,g вого паза 11 после первого подъема стола, щенными захватами 3 находится над отво-а уступ 17 препятствует тому же сухарю 13
зайти в винтовой паз 11 из вертикального продольного паза 12 в начале опускания
20
дящим транспортером 1. На опорную плоскость подъемно-поворотного стола, который находится в нижнем положении, подается стопка из шести тридцатиместных упаковок с яйцами, причем каждая из последующих упаковок в стопке ориентирована относительно предыдущей на угол 90°. При включении электродвигателя 25 привод 7 через водило 8 и шток 6 перемещает каретку 2 по направляющим 4 в сторону подъемно-поворотного стола. Захваты 3 входят в зазор, образованный краями верхней и нижерасположенной упаковок, захватывают верхнюю упаковку с яйцами и при обратном ходе каретки 2 переносят упаковку на отводящий транспортер 1. В дальнейшем весь процесс пере- зо носа упаковок повторяется.
После. каждого последующего перемещения упаковок с помощью мальтийского механизма 18, фигурного кулачка 22 и штока 23 производится подъем стола с оставшимися упаковками на заданную высоту, равную 0,25 шага винтового паза 11 и соответствующую шагу размещения упаковок в стопке. При этом взаимодействие винтового паза 11 и сухаря 13 обеспечивает поворот стола на угол 90°. Для полной разборки стопки, состоящей из шести упаковок с
стола.
Формула изобретения
Устройство для подачи упаковок к захватам, включающее расположенный под кареткой с захватами подъемно-поворотный t- стол, выполненный в виде платформы, закрепленной на торце цилиндрического стержня, вертикально установленного в направляющие и кинематически связанного с механизмом привода, отличающееся тем, что, с целью упрощения конструкции и повышения эксплуатационной надежности, цилиндрический стержень снабжен винтовым пазом, нижняя часть которого через шаг витка соединена с последним вертикальным продольным пазом, а направляющие снабжены подпружиненным сухарем, установленным с возможностью взаимодействия с винтовым и вертикальным пазами, при этом основание нижней части вертикального паза расположено под основанием винтового паза, а основание противоположной стороны вертикального паза расположено над основанием винтового паза.
35
40
яйцами, требуется пять подъемов стола общей высотой, равной 1,25 шага винтового паза. В конце последнего подъема стола сухарь 13 попадает в вертикальный продольный паз 12, а пружина 14 прижимает сухарь к снованию паза.
Опускание стола производится без его поворота на расстояние, равное одному шагу винтового паза 11, в конце которого сухарь 13 опять попадает в винтовой паз И. При
последующем опускании стола взаимодейст- вие винтового паза 11 и сухаря 13 разворачи-
стола.
20
зо
Формула изобретения
о
Устройство для подачи упаковок к захватам, включающее расположенный под кареткой с захватами подъемно-поворотный t- стол, выполненный в виде платформы, закрепленной на торце цилиндрического стержня, вертикально установленного в направляющие и кинематически связанного с механизмом привода, отличающееся тем, что, с целью упрощения конструкции и повышения эксплуатационной надежности, цилиндрический стержень снабжен винтовым пазом, нижняя часть которого через шаг витка соединена с последним вертикальным продольным пазом, а направляющие снабжены подпружиненным сухарем, установленным с возможностью взаимодействия с винтовым и вертикальным пазами, при этом основание нижней части вертикального паза расположено под основанием винтового паза, а основание противоположной стороны вертикального паза расположено над основанием винтового паза.
5
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения упаковок | 1986 |
|
SU1391555A1 |
| КОМПЛЕКС ПОДЪЕМНО-ТРАНСПОРТНОГО ОБОРУДОВАНИЯ ДЛЯ УТИЛИЗАЦИИ ЖИДКИХ РАДИОАКТИВНЫХ ОТХОДОВ НА АТОМНОЙ ЭЛЕКТРОСТАНЦИИ И ЕГО СОСТАВНЫЕ ЧАСТИ | 2007 |
|
RU2350545C1 |
| Автомат для изготовления электрическихКАТушЕК | 1979 |
|
SU807396A1 |
| Устройство для сборки магнитопроводов электрических машин | 1975 |
|
SU612349A1 |
| Поточная линия для штамповки крупногабаритных листовых заготовок | 1991 |
|
SU1834813A3 |
| МАШИНА ДЛЯ УПАКОВЫВАНИЯ ИЗДЕЛИЙ В ПОЛИМЕРНУЮ ПЛЕНКУ | 1992 |
|
RU2015943C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ УПАКОВКИ ИЗ ТОНКОГО ЛЕНТОЧНОГО МАТЕРИАЛА | 2000 |
|
RU2170209C1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1981 |
|
SU967622A1 |
| Установка Кривовязюка для вырубки заготовок из плоского материала | 1981 |
|
SU958083A1 |

Изобретение относится к сельскому хозяйству. Цель изобретения - упрощение конструкции и повышение эксплуатационной надежности. Устройство для подачи упаковок к захватам содержит подъемно-поворотный стол в виде платформы, закрепленной на торце цилиндрического стержня, кинематически связанного с кулачком механизма привода. Цилиндрический стержень имеет на своей поверхности винтовой и вертикальный продольный пазы, связанные между собой, и установлен в направляющие, которые снабжены подпружиненным сухарем , взаимодействующим с пазами при перемещении стола. Над столом расположены захваты для упаковок с яйцом. При работе устройства кулачок воздействует на цилиндрический стержень. При взаимодействии винтового паза с сухарем стол поворачивается на угол 90° и поднимается. В конце подъема стола упаковки захватываются захватами, а сухарь попадает в вертикальный продольный паз и стол опускается. Далее процесс повторяется. 2 ил. Ј С/)
Фиг. 1
77
(Риг. 2
| Устройство для перемещения упаковок | 1986 |
|
SU1391555A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
