Изобретение относится к машино- строению и может быть использовано, например, в автоматических линиях с приспособлениями-спутниками для переустановки деталей, имеющих на- ружную поверхность сложной конфигурации, с перебазированием их на разные поверхности.
Цель изобретения - расширение тех- нологических возможностей за счет переустановки детали на разные базовые плоскости.
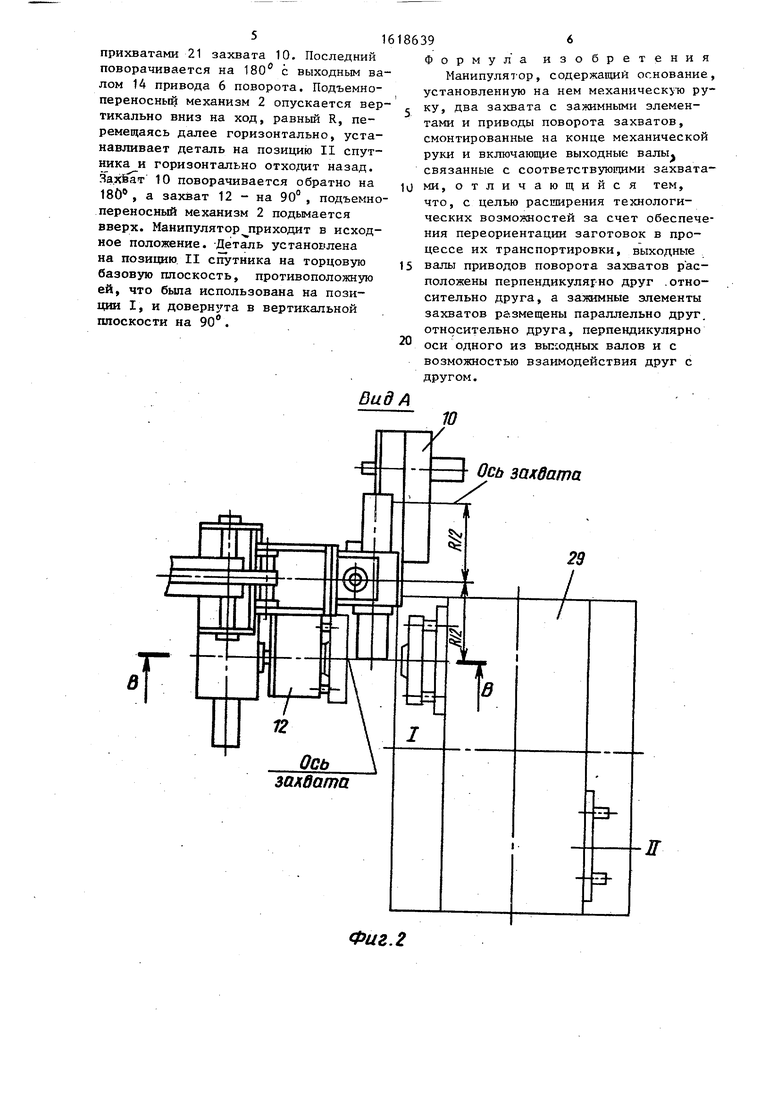
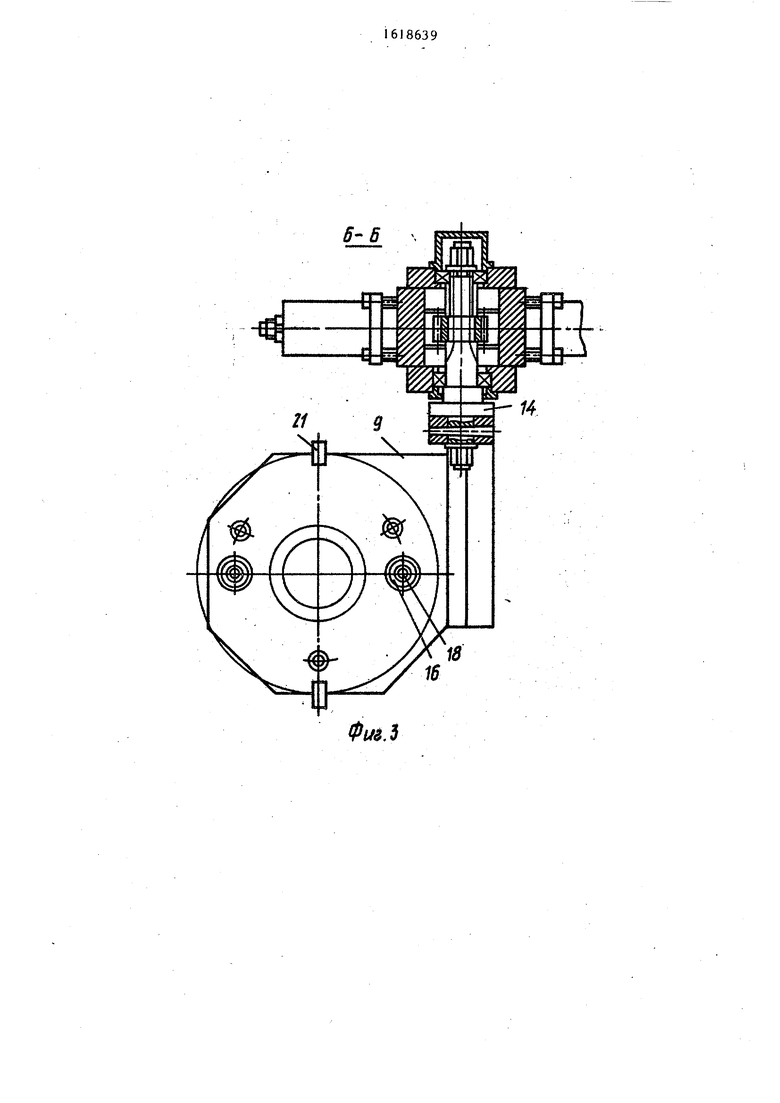
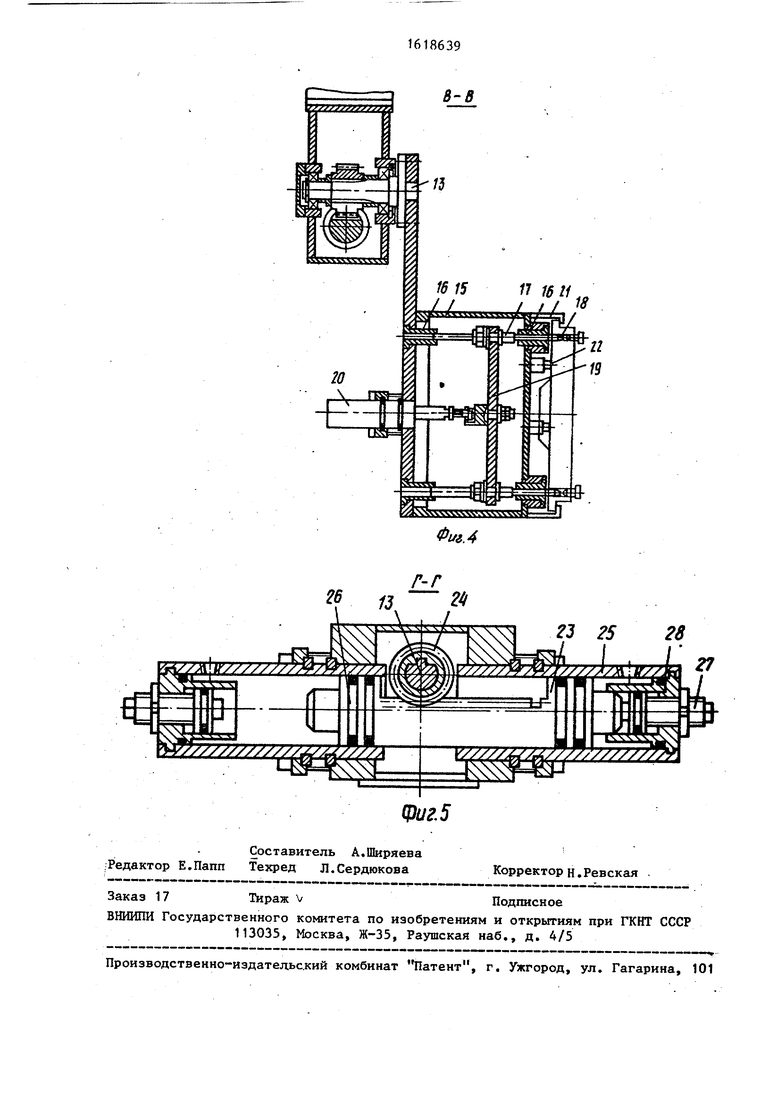
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - вид А на фиг.1$ на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг.2; на фигоЗ - разрез Г-Г на фиг.1.
Манипулятор предназначен, например для встраивания в спутниковую авто- матическую линию для переустановки деталей, имеющих наружную поверхность сложной конфигурации, по которой невозможно осуществлять зажим, и плоские торцы, с одной позиции пово- ротного спутника на другую позицию, .; расположенную на противоположной вертикальной грани, с перебазировкой детали на другие поверхности с изменением углового положения детали в . вертикальной плоскости.
Манипулятор состоит из основания 1, установленной на нем механической руки в виде подъемно-переносного механизма 2, включающего параллело- граммно-пантографный механизм 3 с приводами вертикального % и горизонтального 5 перемещений и приводов 6 и 7 поворота., смонтированных на ко- нечных звеньях механической руки посредством кронштейна В9 а на выходных валах этих приводов поворота 6 и 7 закреплены соответственно плита . 9 с захватом 10 и плита 11 с захватом 12. Захват 12 закреплен на выход- ном валу 13, расположенном горизонтально, с радиусом поворота R. а захват 10 закреплен на выходном валу 14, расположенном вертикально, с радиусом поворота R/2, при этом оси по- ворота захватов 10 и 12 расположены во взаимно перпендикулярных плоскостях.
Оси захватов 10 и 12 расположены горизонтально и смещены в горизон- тальной и вертикальной плоскостях на расстоянии R друг от друга. Кроме того, оси захватов 10 , и 12 рас- положены симметрично относительно
центра поворота захвата 10 (центр поворота захвата 10 выбирается гео - метрически).
Конструкция захвата 10 аналогична конструкции захвата 12 и представляет собой сварной корпус 15, внутри которого в направляющих .втулках 16 установлены зажимные элементы, выполненные в виде скалок 17, оканчивающихся базовыми пальцами 18. Скал - ки 17 скреплены между собой планкой t9, связанной с цилиндром 20. На сварном корпусе 15 смонтированы поворотные зажимные прихваты 21 (привод прихватов не обозначен) и базовы платики 22„
Привод поворота захвата 10 также аналогичен приводу поворота захвата 12 и выполнен в виде силового цилиндра и зубчато-реечной передачи, зубчатой рейки 23 и зубчатого колеса 24 связанного с выходным валом 13(14), к которому крепится плита 11(9) со схватом. Зубчатая рейка 23 нарезана на штоке силового цилиндра 25 с двум поршнями 26 и регулируемыми упорами 27, установленными в крышках 28 силового цилиндра 25. Захваты 10 и 12 расположены так, что их базовые пальцы 18 направлены навстречу друг другу, размещены параллельно друг относительно друга и перпендикулярно оси выходного вала 14.
Манипулятор работает следующим образом.
Подъемно-переносной механизм 2 от привода 5 горизонтального перемещения осуществляет горизонтальный ход к спутнику 29. Захват 12 зажимает обрабатываемую деталь 30 на позиции I спутника, вводя базовые пальцы 18 в базовые отверстия детали 30 на половину длины отверстия. Прихваты 21- поджимают деталь к базо- вьм платикам 22. Подъемно-переносный механизм 2 отходит горизонтально от спутника 29. Параллельно позиции II спутника снимается готовая деталь и спутник поворачивается на 180°, и место позиции I спутника у манипулятора занимает позиция II. Захват 12 поворачивается с выходным валом :13 привода 7 поворота на 90° и становится напротив захвата 10. . Пальцы 18 захвата 10 входят в деталь также на половину длины базового отверстия, а пальцы 18 и рычаги захвата 12 отводятся, деталь зажимается
5 прихватами 21 захвата 10. Последний поворачивается на 180° с выходным валом 14 привода 6 поворота. Подъемно- переносный механизм 2 опускается вертикально вниз на ход, равный R, перемещаясь далее горизонтально, устанавливает деталь на позицию II спутника и горизонтально отходит назад. Захв ат 10 поворачивается обратно на 180°, а захват 12 - на 90°, подъемно переносный механизм 2 подымается вверх. Манипулятор приходит в исходное положение. -Деталь установлена на позицию II спутника на торцовую базовую плоскость, противоположную ей, что была использована на позиции I, и довернута в вертикальной плоскости на 90°.
ф
8639
0
5
0
6
ормула изобретения Манипулятор, содержащий основание, установленную на нем механическую руку, два захвата с зажимными элементами и приводы поворота захватов, смонтированные на конце механической руки и включающие выходные валы связанные с соответствующими захватами, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения переориентации заготовок в процессе их транспортировки, выходные валы приводов поворота захватов расположены перпендикулярно друг .относительно друга, а зажимные элементы захватов размещены параллельно друг, относительно друга, перпендикулярно оси одного из выходных валов и с возможностью взаимодействия друг с другом.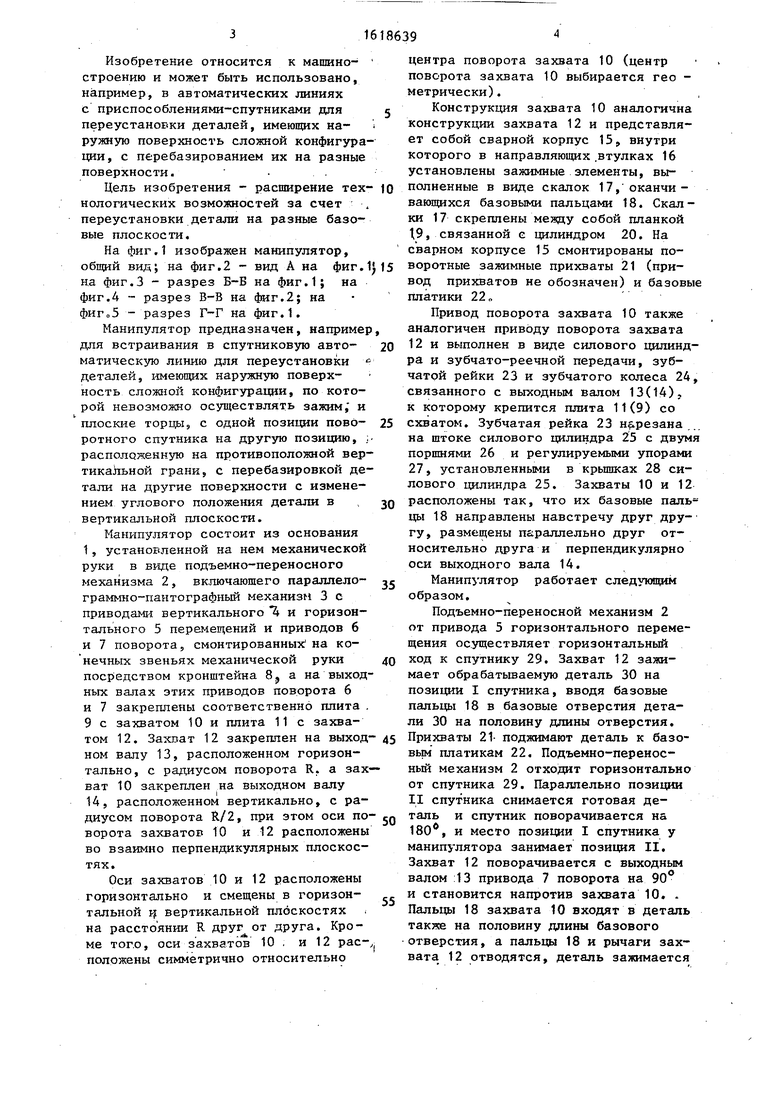
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1990 |
|
SU1743851A1 |
| Фрезерный станок | 1984 |
|
SU1210999A1 |
| Автоматическая линия | 1985 |
|
SU1348144A1 |
| Многооперационный станок | 1982 |
|
SU1047661A1 |
| Полуавтоматическая сборочная линия | 1982 |
|
SU1115886A1 |
| Автоматическая линия для обработки деталей | 1985 |
|
SU1289656A1 |
| Металлорежущий станок | 1990 |
|
SU1830333A1 |
| Автооператор | 1980 |
|
SU891328A1 |
| МНОГООПЕРАЦИОННАЯ УСТАНОВКА ДЛЯ ПРЕССОВАНИЯ И СБОРКИ | 1994 |
|
RU2104817C1 |
| Приспособление-спутник | 1987 |
|
SU1512751A1 |
Изобретение относится к машиностроению и может быть использовано, например, в агрегатных станках и.автоматических линиях с приспособлениями-спутниками для переустановки деталей с наружной поверхностью сложной конфигурации. Целью изобретения является расширение технологических возможностей за счет переориентации заготовок при транспортировке. Манипулятор содержит механическую руку с ,приводами вертикального 4 и горизонтального 5 перемещений и двумя захватами 10 и 12. Захват 10 закреплен на плите 9, смонтированной на выходном валу привода 6 поворота, захват 12 - на плите 11, смонтированной на выходном валу привода 7 поворота. Каждый захват снабжен зажимными элементами,установленными параллельно один относительно другого, перпендикулярно выходному валу привода 6 поворота и с возможностью взаимодействия друг с другом. При этом выходные валы приводов 6 и 7 поворота являются взаимно перпен- дикулярными. 5 ил. С ОО 05 СО СО Фив.1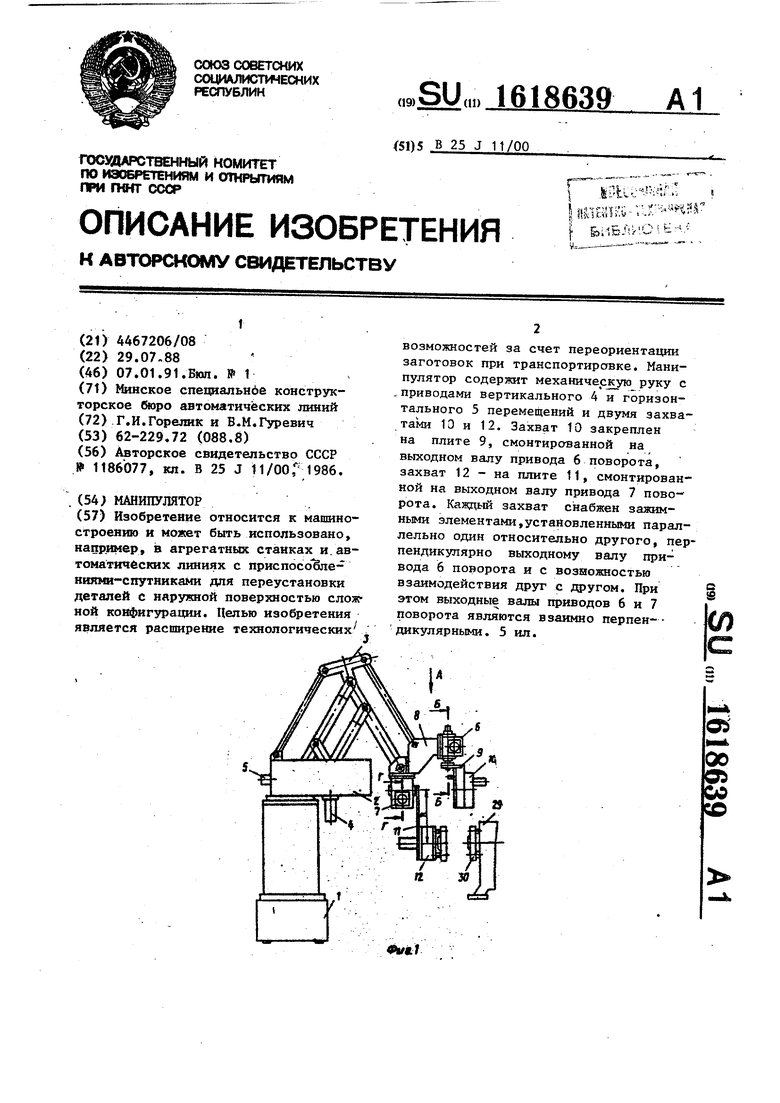
Г
Фиг. 2
Вид А
5-6
Фиь.4 Г-Г
is a
23 25 28
| Промышленный робот | 1982 |
|
SU1186077A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
