Изобретение относится к машиностроению и может быть использовано, например, в автоматических линиях с приспособлениями-спутниками для переустановки деталей, имеющих наружную поверхность сложной конфигурации, с перебазированием их на разные поверхности.
Известна конструкция двух взаимосвязанных манипуляторов, которая аналогичную задачу решает передачей деталей от одного манипулятора с тремя степенями подвижности другому манипулятору также с тремя степенями подвижности.
Недостатком этой конструкции является сложность ее технического решения, определяемая использованием двух манипуляторов, разных по конструкции с большим числом степеней подвижности.
Наиболее близким по технической сущности к предлагаемому является манипулятор, содержащий основание, установленную на нем механическую руку, два схвата с зажимными элементами и приводы поворота
схватов, смонтированные на конце механической руки и включающие выходные валы, кинематически связанные с соответствующими схватами и расположенные перпендикулярно друг относительно друга перпендикулярно оси одного из выходных валов и с возможностью взаимодействия друг с другом.
Недостатками этого манипулятора являются большое количество движений для переустановки деталей и длительный цикл работы, пониженная производительность и сложность конструкции.
Целью изобретения является повышение производительности и упрощение конструкции манипулятора.
Поставленная цель достигается тем, что в манипуляторе, содержащем основание, установленную на нем механическую руку, несущую загрузочный и разгрузочный захваты с приводами их поворота, причем оси выходных валов приводов поворота захватов взаимно перпендикулярны, а оси симw
Ё
VI
со
00 СП
метрии зажимных элементов захватов перпендикулярны оси выходного вала привода поворота загрузочного захвата, оси выходных валов приводов поворота захватов лежат в одной плоскости, а разгрузочный захват связан с выходным валом привода его поворота посредством дополнительно введенного Г-образного равноплечего рычага, причем расстояние от оси выходного вала привода поворота разгрузочного за- хвата до оси симметрии зажимных элементов загрузочного захвата равно длине плеча Г-образного равноплечего рычага.
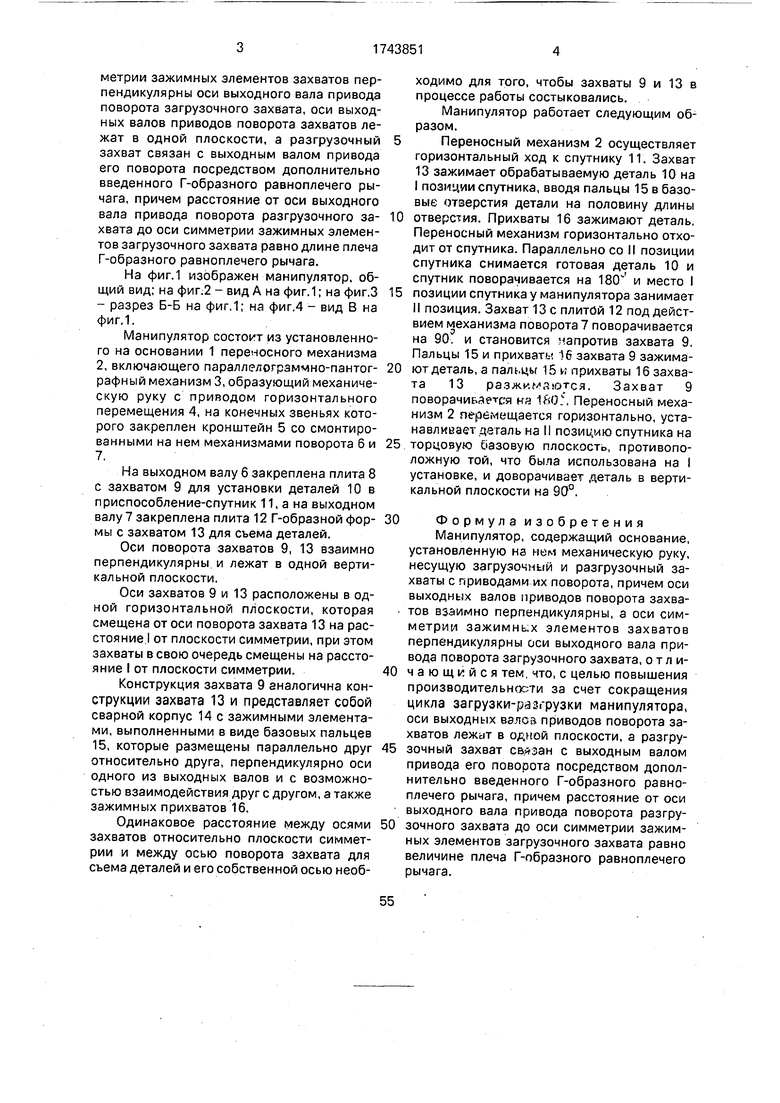
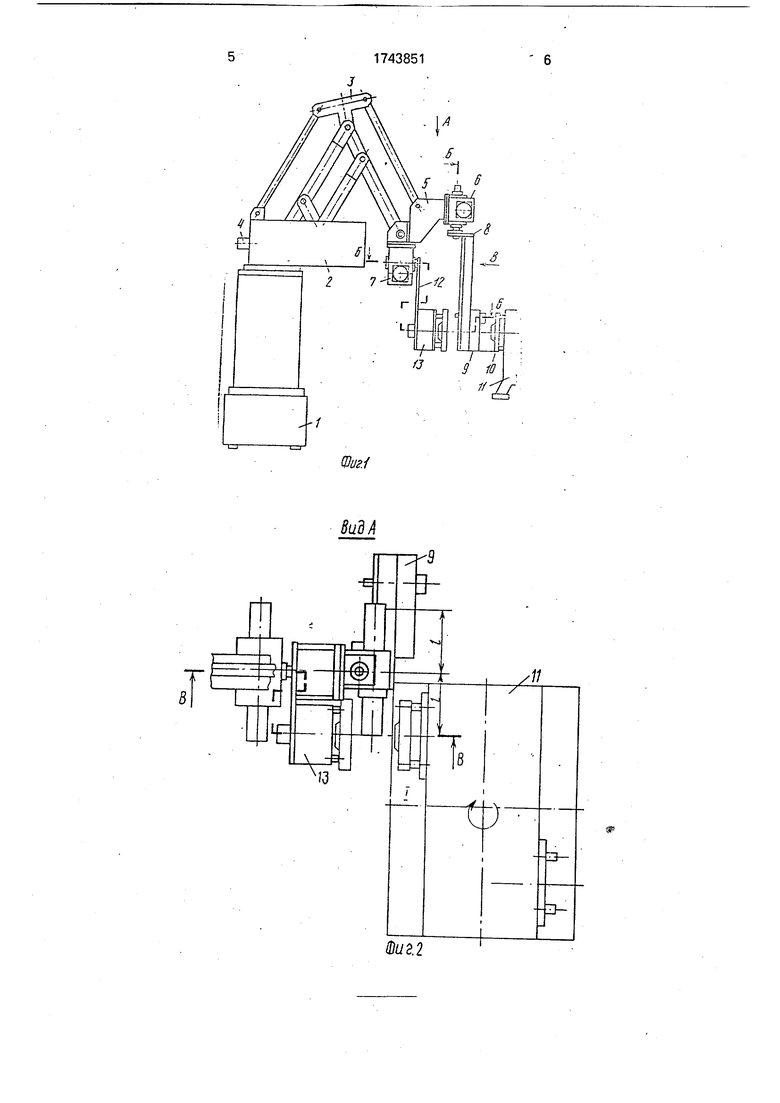
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - вид В на фиг.1.
Манипулятор состоит из установленного на основании 1 переносного механизма 2, включающего параллелогрзммно-пантог- рафный механизм 3, образующий механическую руку с приводом горизонтального перемещения 4, на конечных звеньях которого закреплен кронштейн 5 со смонтированными на нем механизмами поворота 6 и 7.
На выходном валу 6 закреплена плита 8 с захватом 9 для установки деталей 10 в приспособление-спутник 11, а на выходном валу 7 закреплена плита 12 Г-образной фор- мы с захватом 13 для съема деталей.
Оси поворота захватов 9, 13 взаимно перпендикулярны и лежат в одной вертикальной плоскости.
Оси захватов 9 и 13 расположены в одной горизонтальной плоскости, которая смещена от оси поворота захвата 13 на расстояние I от плоскости симметрии, при этом захваты в свою очередь смещены на расстояние I от плоскости симметрии.
Конструкция захвата 9 аналогична конструкции захвата 13 и представляет собой сварной корпус 14 с зажимными элементами, выполненными в виде базовых пальцев 15, которые размещены параллельно друг относительно друга, перпендикулярно оси одного из выходных валов и с возможностью взаимодействия друг с другом, в также зажимных прихватов 16.
Одинаковое расстояние между осями захватов относительно плоскости симметрии и между осью поворота захвата для съема деталей и его собственной осью необходимо для того, чтобы захваты 9 и 13 в процессе работы состыковались.
Манипулятор работает следующим образом.
Переносный механизм 2 осуществляет горизонтальный ход к спутнику 11. Захват 13 зажимает обрабатываемую деталь 10 на
Iпозиции спутника, вводя пальцы 15 в базовые отверстия детали на половину длины отверстия. Прихваты 16 зажимают деталь. Переносный механизм горизонтально отходит от спутника. Параллельно со II позиции спутника снимается готовая деталь 10 и спутник поворачивается на и место I позиции спутника у манипулятора занимает
IIпозиция. Захват 13с плитой 12 под действием механизма поворота 7 поворачивается на 90. и становится напротив захвата 9. Пальцы 15 и прихваты 16 захвата 9 зажимают деталь, а пальцы 15 и прихваты 16 захвата 13 разжкмяются. Захват 9 поворачивается на 180. Переносный механизм 2 перемещается горизонтально, устанавливает деталь на II позицию спутника на торцовую Ьазовую плоскосто, противоположную той, что была использована на I установке, и доворачивает деталь в вертикальной плоскости на 90°.
Формула изобретения Манипулятор, содержащий основание, установленную на нем механическую руку, несущую загрузочный и разгрузочный захваты с приводами их поворота, причем оси выходных валов приводов поворота захватов взаимно перпендикулярны, а оси симметрии зажимнь.х элементов захватов перпендикулярны оси выходного вала привода поворота загрузочного захвата, отличающийся тем, что, с целью повышения производительности за счет сокращения цикла загрузки-разгрузки манипулятора, оси выходных валов приводов поворота захватов лежыт в одной плоскости, а разгрузочный захват связан с выходным валом привода его поворота посредством дополнительно введенного Г-образного равноплечего рычага, причем расстояние от оси выходного вала привода поворота разгрузочного захвата до оси симметрии зажимных элементов загрузочного захвата равно величине плеча Г-образного равноплечего рычага.
i. 6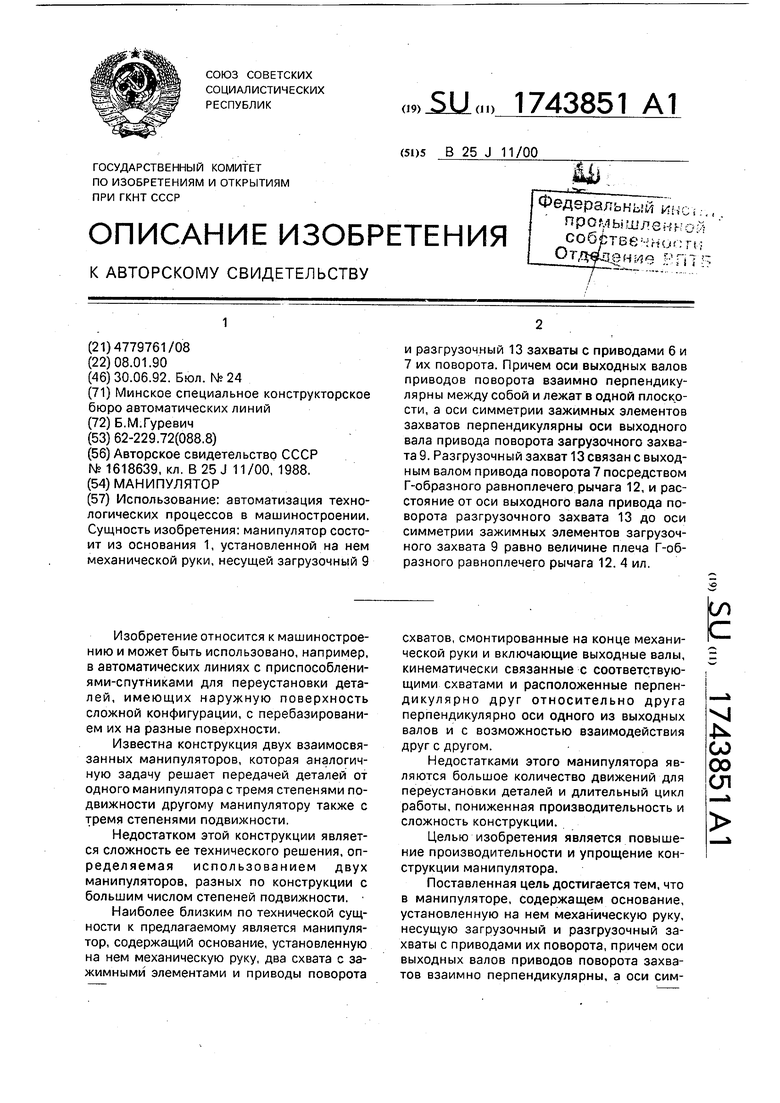
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1618639A1 |
| Промышленный робот | 1977 |
|
SU743862A1 |
| Автоматическая линия для обработки деталей | 1989 |
|
SU1712128A1 |
| Фрезерный станок | 1984 |
|
SU1210999A1 |
| Многооперационный станок | 1988 |
|
SU1708572A1 |
| Роботизированный участок обработки валов | 1986 |
|
SU1419858A1 |
| Система для манипулирования и закрепления обрабатываемой лопатки | 2023 |
|
RU2818554C1 |
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Гибкий производственный модуль автоматической линии | 1985 |
|
SU1456297A1 |
| Рука манипулятора | 1981 |
|
SU979102A1 |
Использование: автоматизация технологических процессов в машиностроении. Сущность изобретения: манипулятор состоит из основания 1, установленной на нем механической руки, несущей загрузочный 9 и разгрузочный 13 захваты с приводами 6 и 7 их поворота. Причем оси выходных валов приводов поворота взаимно перпендикулярны между собой и лежат в одной плоскости, а оси симметрии зажимных элементов захватов перпендикулярны оси выходного вала привода поворота загрузочного захвата 9. Разгрузочный захват 13 связан с выходным валом привода поворота 7 посредством Г-образного равноплечего рычага 12, и расстояние от оси выходного вала привода поворота разгрузочного захвата 13 до оси симметрии зажимных элементов загрузочного захвата 9 равно величине плеча Г-образного равноплечего рычага 12. 4 ил.
в) и г. 2
15х
6
,14
V5/
/ МУУ/АУ,1У/уу//уулууЛ ./у.Улчу
ВЯТ
&Э
| Манипулятор | 1988 |
|
SU1618639A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
