Изобретение относится к устройствам технологической автоматики и может быть использовано в схемах управления приводом тормоза шахтных подъемных машин.
Целью изобретения является повышение надежности.
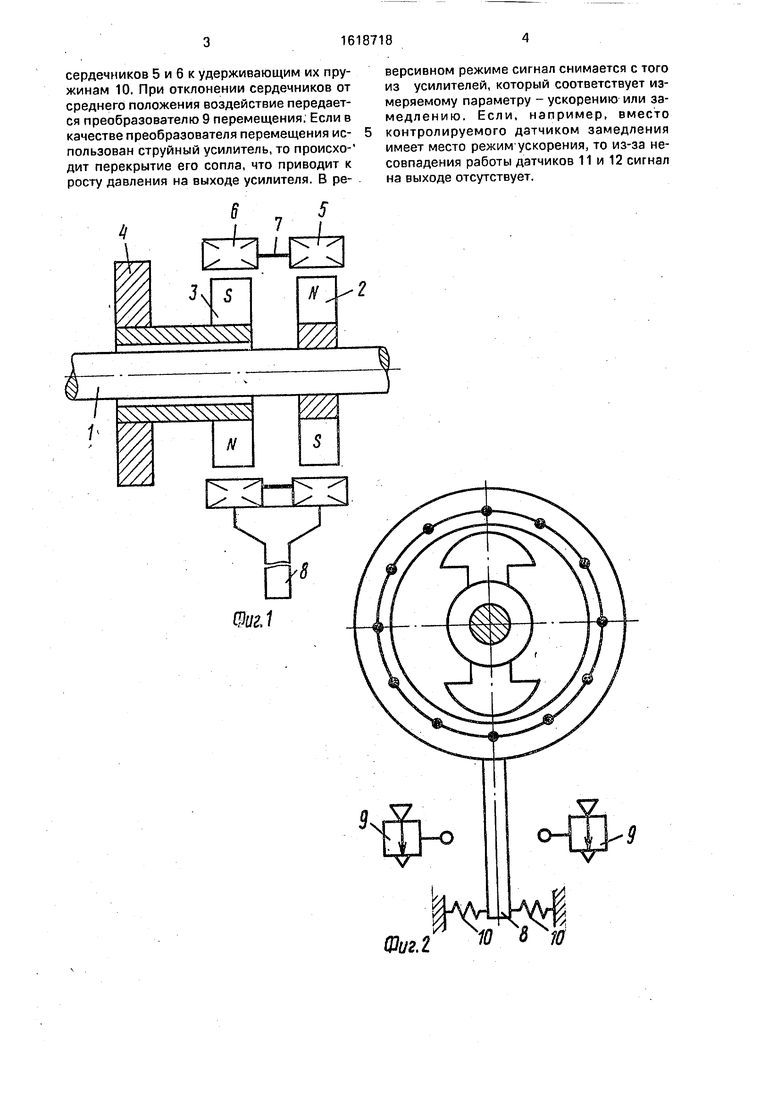
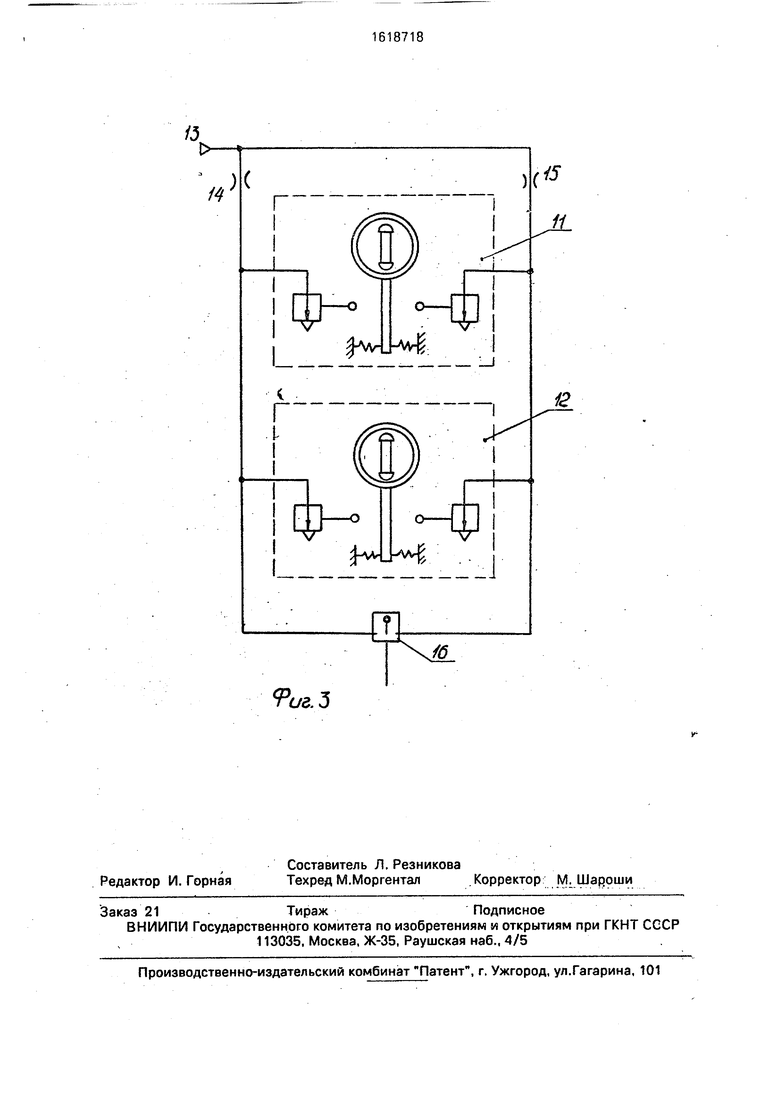
На фиг. 1 изображен датчик ускорения и замедления шахтной подъемной машины, вид сбоку; на фиг. 2 - то же, вид с торца; на фиг. 3 - гидравлическая схема датчика в реверсивном режиме.
В датчике ускорения и замедления шахтной подъемной машины на валу 1 (фиг. 1) зафиксирован постоянный магнит 2 и свободно поражен такой же магнит 3, связанный жестко с маховиком 4. Соосно с магнитом 2 находится сердечник 5, а соосно с магнитом 3 - сердечник 6. Сердечники жестко связаны между собой. Через оба сердечника проходят стержни 7 беличьей клетки, которые закорачиваются с внешних торцов сердечников. С сердечниками связан рычаг 8, воздействующий на переключатель с преобразователем 9 перемещения (фиг, 2), Сердечники удерживаются в нейтральном положении с помощью пружин и упопов 10.
Магнитоиндуктивный датчик 11 ускорения и замедления шахтной подъемной машины и магнитоиндуктивный датчик 12 скорости подключены к общему источнику 13 питания через дроссели 14 и 15, причем каждому из направлений движения соответствует один из дросселей и по одному из выходов датчиков. Выходы одного направления соединены параллельно по схеме И. Между собой линии для каждого из направ- лений связаны через входы элемента ИЛИ 16, выход которого является выходом датчика.
Датчик ускорения и замедления работает следующим образом.
При установившейся скорости магниты 2 и 3 вращаются синхронно, угол рассогласования между ними минимален и обусловлен наличием потерь (механических и в линии связи), поэтому отсутствует реакция со стороны сердечников на удерживающие пружины. Сердечники находятся, в нейтральном положении. В таком же положении они находятся при отсутствии вращения.
В переходных режимах за счет инерции маховика происходит рассогласование магнитов по углу. При этом возникает вращающий момент, который передается от
(Л
с
о
00
ч
оо
сердечников 5 и б к удерживающим их пружинам 10. При отклонении сердечников от среднего положения воздействие передается преобразователю 9 перемещения. Если в качестве преобразователя перемещения использован струйный усилитель, то происхо- дит перекрытие его сопла, что приводит к росту давления на выходе усилителя. В реверсивном режиме сигнал снимается с того из усилителей, который соответствует измеряемому параметру - ускорению или за- медлению. Если, например, вместо контролируемого датчиком замедления имеет место режим ускорения, то из-за несовпадения работы датчиков 11 и 12 сигнал на выходе отсутствует.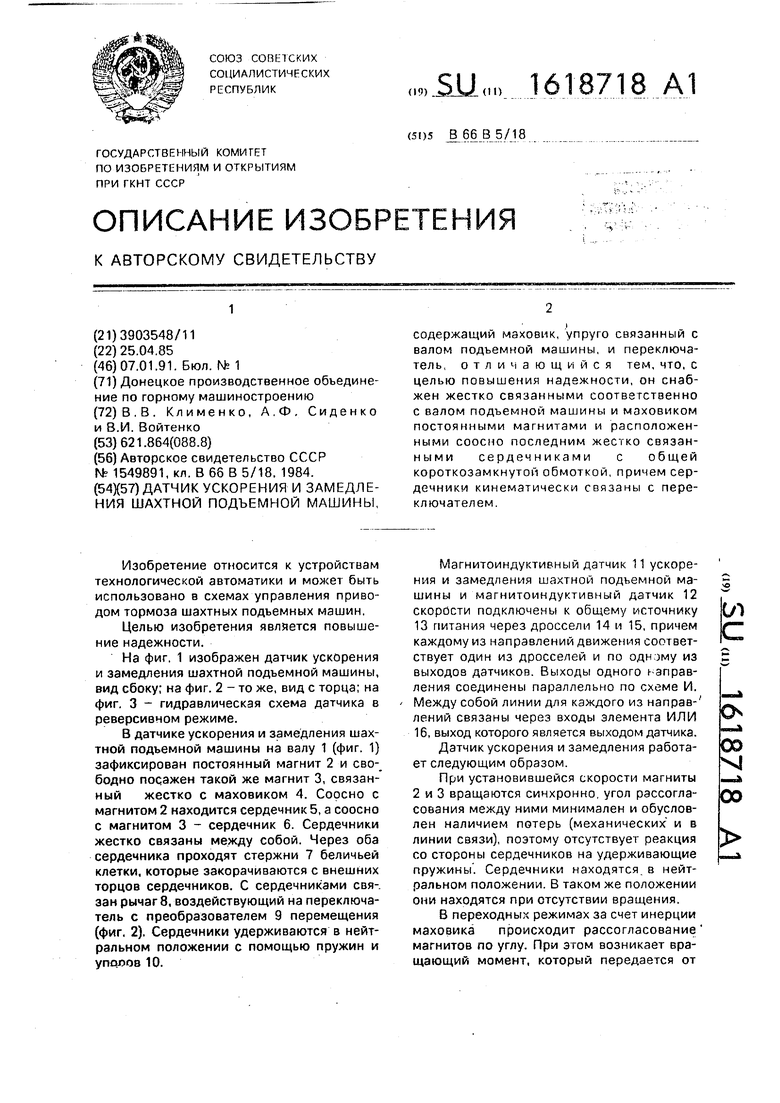
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ШАХТНОЙ ПОДЪЕМНОЙ МАШИНОЙ | 1965 |
|
SU171042A1 |
| Гидромеханический акселерометр (его варианты) | 1982 |
|
SU1080087A1 |
| Гидромеханический акселерометр,преимущественно для измерения замедления шахтных подъемных машин | 1979 |
|
SU888044A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ КОНСТРУКТИВНОГО ЭЛЕМЕНТА ГРУЗОПОДЪЕМНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376239C1 |
| Устройство для управления приводом шахтных подъемных машин | 1972 |
|
SU643412A1 |
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| Устройство для регулируемого предохранительного торможения подъемной машины | 1977 |
|
SU691375A1 |
| Устройство для управления приводом тормоза шахтной подъемной машины | 1988 |
|
SU1680614A1 |
k
-8
ША
-о
о9
h:
Фиг.2 ° 8 d
V
(
Г
I
Лг
I LJ
i
Г
I
9Ъ/&3
/5
U
«
Л
Н
.4.
J
| Устройство управления предохранительным тормозом подъемной машины | 1984 |
|
SU1549891A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
