Изобретение относится к машиностроению и может быть использовано при автоматизации транспортных и сборочных процессов.
Цель изобретения - расширение технологических возможностей за счет большого диапазона деформации поворотного кольца.
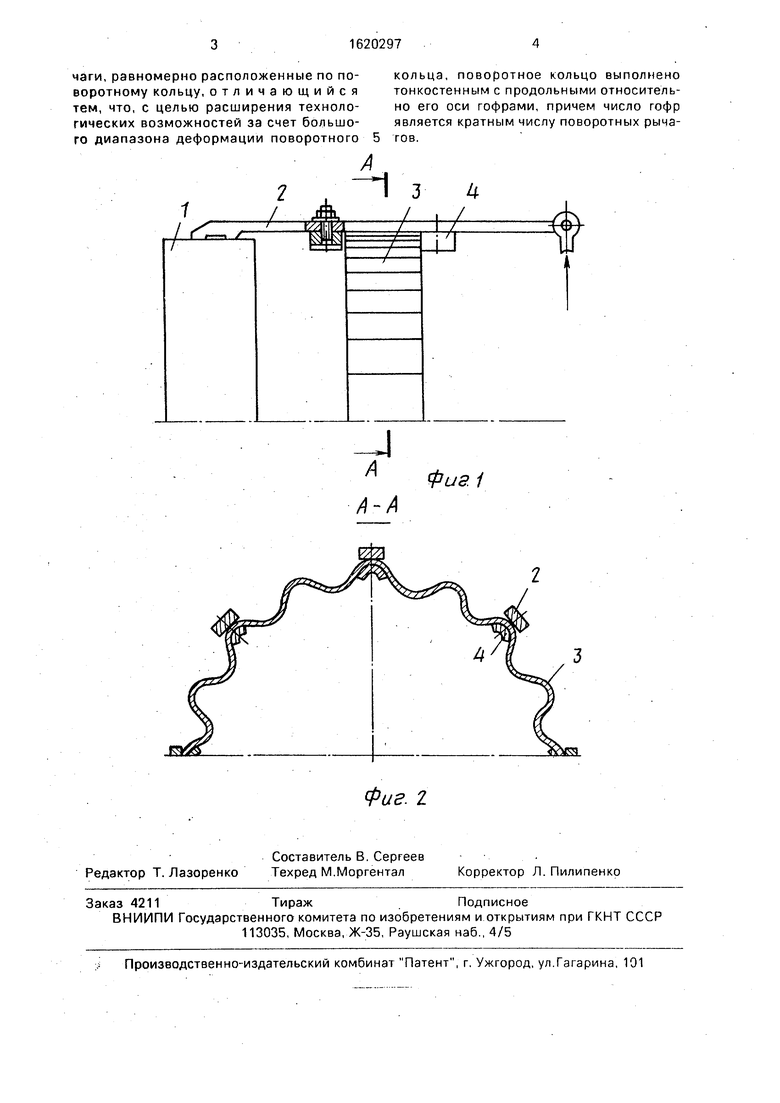
На фиг.1 изображен схват в рабочем положении; на фиг.2 -сечение А-А на фиг.1.
Схват промышленного робота для захвата детали 1 содержит жесткие захватные рычаги 2, прикрепленные к упругому поворотному кольцу 3 с помощью пластин 4, жесткость которых равна жесткости захватных рычагов 2.
Один конец каждого из захватных рычагов 2 связан с исполнительным силовым механизмом (не показан), а другой соприкасается непосредственно с изделием. Упругое кольцо 3 имеет продольные относительно оси кольца гофры. Захватные рычаги 2 укреплены равномерно по периметру упругого кольца 3.
Число гофр поворотного кольца является кратным числу поворотных рычагов.
Схват работает следующим образом.
После приложения нагрузки от исполнительного силового механизма жесткие за- хватные рычаги 2 поворачиваются и охватывают деталь 1. Упругое кольцо 3 выступает в качестве шарнирной опоры, относительно которой происходит вращение захватных рычагов 2. При дальнейшем увеличении нагрузки и отсутствии деформации жестких захватных рычагов 2 упругое кольцо 3 начинает деформироваться, увеличиваясь в диаметре за счет распрямления продольных гофр, что исключает упругую деформацию детали 1 и захватных рычагов 2 и, как следствие, проскальзывание последних относительно тонкостенной детали 1.
Избыточное усилие исполнительного механизма компенсируются за счет деформации упругого кольца 3.
Формула изобретения
Схват промышленного робота, содержащий поворотное кольцо и захватные ры-
ю
чаги, равномерно расположенные по поворотному кольцу, отличающийся тем, что, с целью расширения технологических возможностей за счет большого диапазона деформации поворотного
кольца, поворотное кольцо выполнено тонкостенным с продольными относительно его оси гофрами, причем число гофр является кратным числу поворотных рычагов.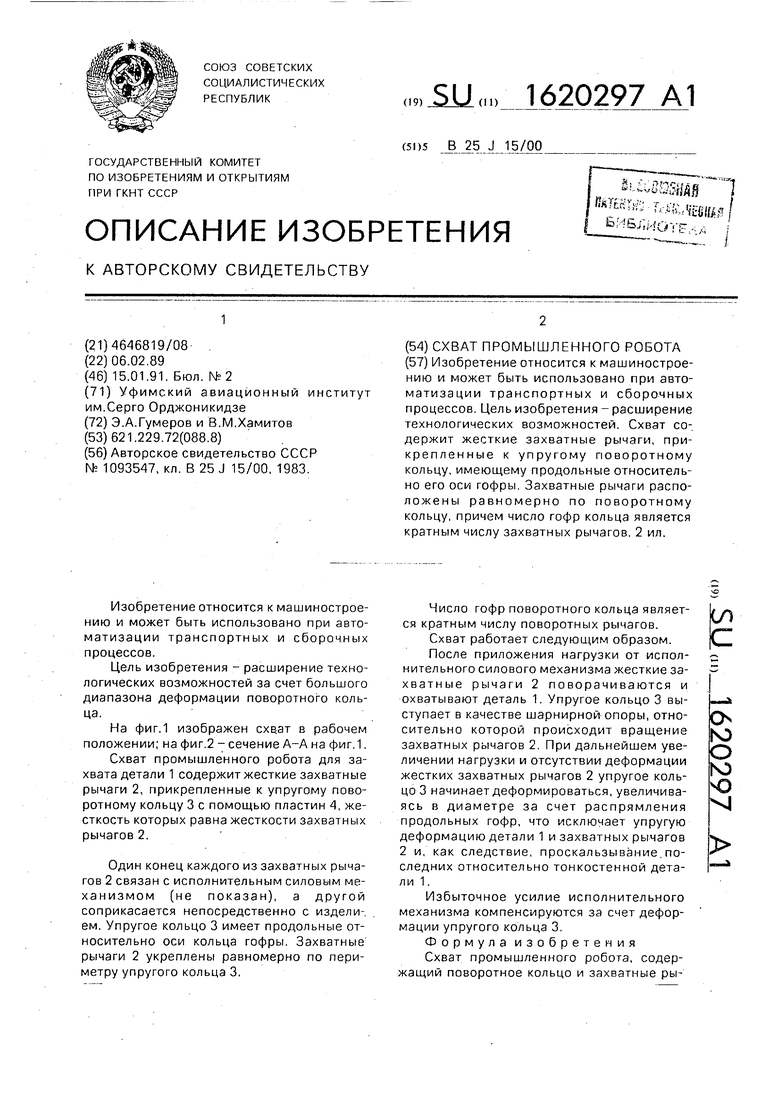
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Захватная головка манипулятора | 1988 |
|
SU1572806A1 |
| Схват промышленного робота | 1979 |
|
SU848354A1 |
| Схват | 1985 |
|
SU1284828A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Схват | 1979 |
|
SU837922A1 |
| МЕХАНИЧЕСКИЙ СХВАТ | 2003 |
|
RU2257996C1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| Схват | 1981 |
|
SU960007A1 |
Изобретение относится к машиностроению и может быть использовано при автоматизации транспортных и сборочных процессов. Цель изобретения - расширение технологических возможностей. Схват содержит жесткие захватные рычаги, прикрепленные к упругому поворотному кольцу, имеющему продольные относительно его оси гофры. Захватные рычаги расположены равномерно по поворотному кольцу, причем число гофр кольца является кратным числу захватных рычагов. 2 ил.
1
/
А
-I з
/
А-А
| Схват манипулятора | 1983 |
|
SU1093547A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
