1
Изобретение относится к технологическим средствам машино- и прибо-.ростроения и предназначено для использования в качестве захватного устройства промышленных роботов и манипуляторов.
Известен схват промышленного робота , содержащий корпус, рычаги механизма .зажима и привод {. .
Однако известный схват имеет жесткую кинематику, поэтому для реализации сборки необходимо обеспечивать его точное позиционирование, т.е. выход в зону расположения сопрягаемых деталей с как можно большей точ- ностью. Это приводит к значительно1и1у усложнению : конструкции приводов роботов , к ужесточению требований к точности изготовления и их элементов, к необходимости ужесточать требования к кинематике работы. Жесткая кинематика схватов не позволяет применять вибрацию, которая значительно ускоряет процесс сборки и дает возможность исключить одну из степеней подвижности робота, а именно, перемещение робота или его исполнительного органа со схватом в направлении, обеспечивающим ввод одной детали в другую, т.е. техно/огическое движе;ние (например, при сборке валика и -втулки). Это связано с отсутствием . в кинематике схватов виброизолирующих элементов, -препятствующих передаче вибрации на весь робот, что может отрицательно сказаться на его кинематической и функциональной возможности.
Жесткая кинематика схватов не поз10воляет осуществлять при сборке самоориентации деталей друг относительно друга, требует точной увязки устройств для подготовки среды (загрузочно-ориентирующих, технологи15ческих устройств и т.д.) страекторией движения схвата, что сужает технологические возможности промышленных роботов в целом.«X схватов
в частности.
20
Цель изобретения - расширение технологических возможностей.
Цель достигается тем, что схват промышленного робота снабх ен пружин25ным параллелограммом и упругой вставкой, а корпус выполнен из неподвижной и подвижной в направлении, перпендикулярном продольной оси схвата, частей, связанных пружинным парал30лелограммом, рычаги механизма зажима и привод связаны посредством упругой вставки.
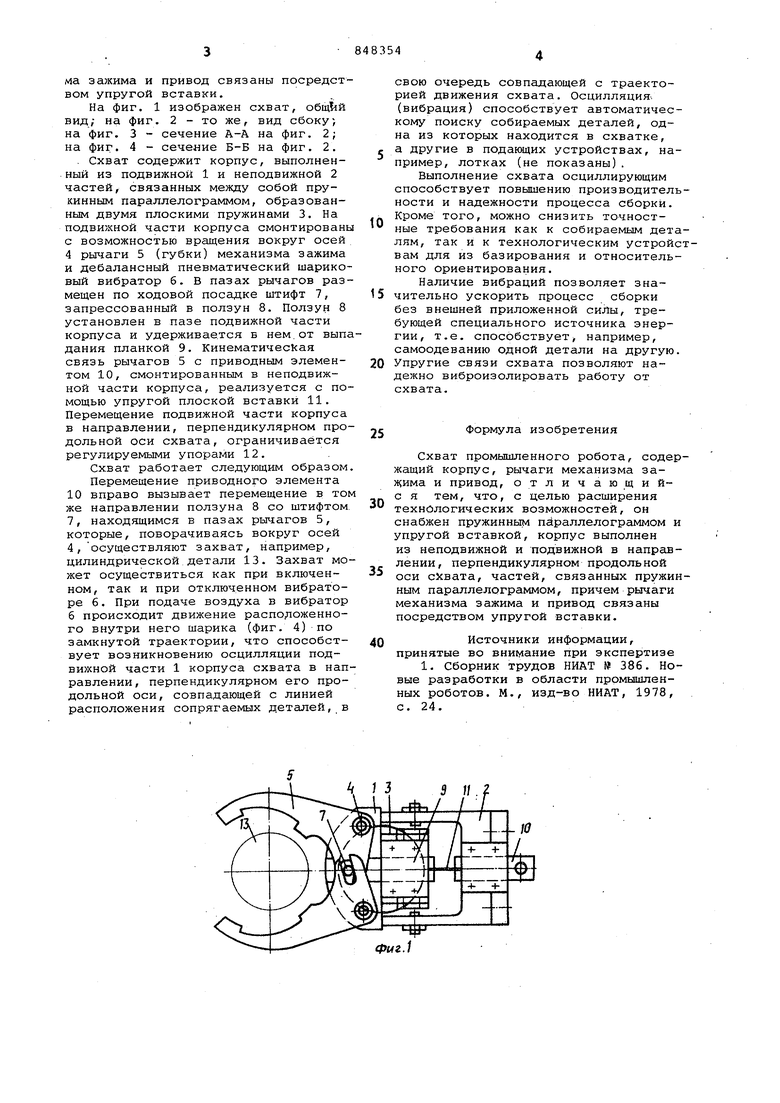
На фиг. 1 изображен схват, вид; на фиг. 2 - то же, вид сбоку-, на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - сечение Б-Б на фиг. 2.
Схват содержит корпус, выполненный из подвижной 1 и неподвижной 2 частей, связанных между собой прукиннЕлм параллелограммом, образованным двумя плоскими пружинами 3. На подвижной части корпуса смонтированы с возможностью вращения вокруг осей 4 рычаги 5 (губки) механизма зажима и дебалансный пневматический шариковый вибратор 6. В пазах рычагов размещен по ходовой посадке штифт 7, запрессованный в ползун 8. Ползун 8 установлен в пазе подвижной части корпуса и удерживается в нем.от выпадания планкой 9. Кинематическая связь рычагов 5 с приводным элементом 10, смонтированным в неподвижной части корпуса, реализуется с помощью упругой плоской вставки 11. Перемещение подвижной части корпуса в направлении, перпендикулярном продольной оси схвата, ограничивается регулируемыми упорами 12.
Схват работает следующим образом
Перемещение приводного элемента 10 вправо вызывает перемещение в том же направлении ползуна 8 со штифтом 7, наход5Ш(имся в пазах рычагов 5, которые, поворачиваясь вокруг осей 4, осуществляют захват, например, цилиндрической детали 13. Захват может осуществиться как при включенном, так и при отключенном вибраторе 6. При подаче воздуха в вибратор б происходит движение распо.ложенного внутри него шарика (фиг. 4) по замкнутой траектории, что способствует возникновению осцилляции подвижной части 1 корпуса схвата в направлении, перпендикулярном его продольной оси, совпадающей с линией расположения сопрягаемых деталей, в
свою очередь совпадающей с траекторией движения схвата. Осцилляция, (вибрация) способствует автоматическому поиску собираемых деталей, одна из которых находится в схватке, J а другие в подающих устройствах, например, лотках (не показаны).
Выполнение схвата осциллирующим способствует повышению производительности и надежности процесса сборки.
o того, можно снизить точностные требования как к собираемым деталям, так и к технологическим устройствам для из базирования и относительного ориентирования.
Наличие вибраций позволяет значительно ускорить процесс сборки без внешней приложенной силы, требующей специального источника энергии, т.е. способствуетj например, самоодеванию одной детали на другую.
0 Упругие связи схвата позволяют надежно виброизолировать работу от схвата.
Формула изобретения
Схват промышленного робота, содержащий корпус, рычаги механизма зажима и привод, отличающийс я тем, что, с целью расширения технологических возможностей, он снабжен пружинным параллелограммом и упругой вставкой, корпус выполнен из неподвижной и подвижной в направлении, перпендикулярном продольной оси сХвата, частей, связанных пружинным параллелограммом, причем рычаги механизма зажима и привод связаны посредством упругой вставки.
0Источники информации,
принятые во внимание при экспертизе
1. Сборник трудов НИАТ № 386. Новые разработки в области промышленных роботов. М., изд-во НИАТ, 1978, с. 24.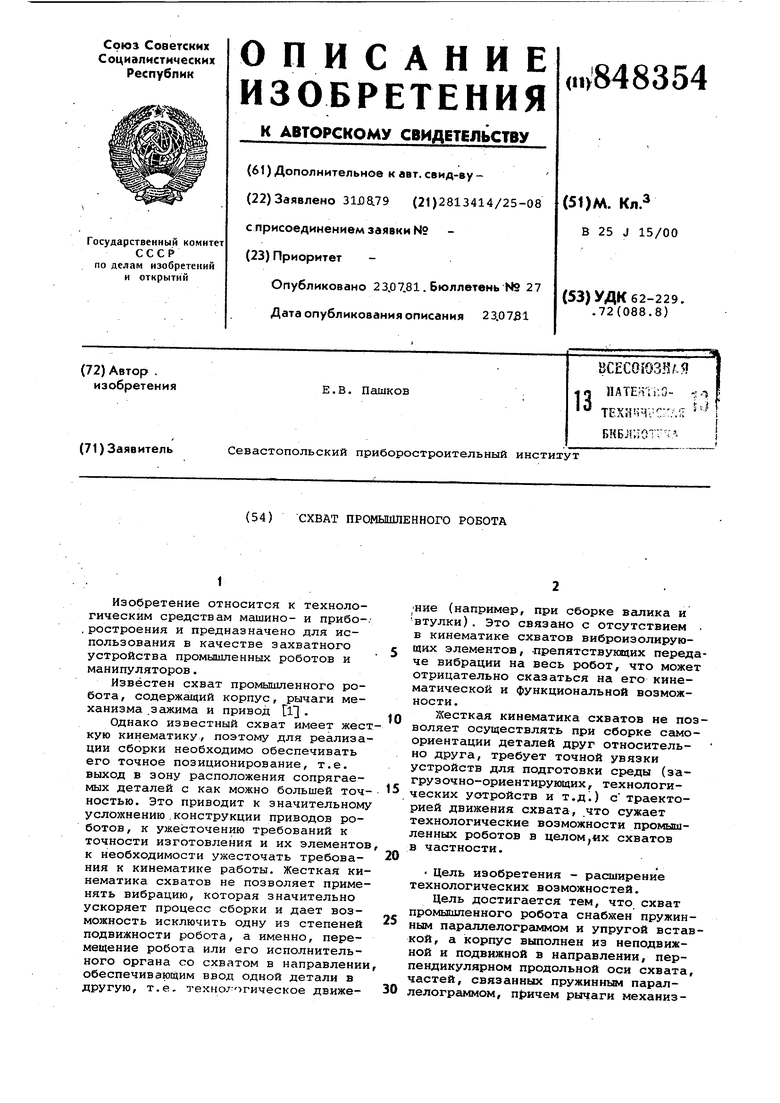
| название | год | авторы | номер документа |
|---|---|---|---|
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Устройство для электроискрового легирования | 1983 |
|
SU1263456A2 |
| Схват | 1981 |
|
SU960007A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Схват | 1977 |
|
SU659377A1 |
| Схват промышленного робота | 1988 |
|
SU1516347A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Устройство для переноса заготовок | 1980 |
|
SU967628A1 |
д1
5-5
