(54) ФИЛЬТР ДЛЯ СИСТЕМ АВТ01-1АТИЧЕСКОГО РЕГУЛИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования нятяжения полосы на моталке листопрокатного стана | 1984 |
|
SU1186309A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
| Позиционная система регулирования | 1976 |
|
SU637790A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Следящий электропривод | 1986 |
|
SU1361694A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| Позиционный электропривод | 1982 |
|
SU1084727A1 |
| Самонастраивающаяся система с приводом на муфтах | 1987 |
|
SU1444712A1 |
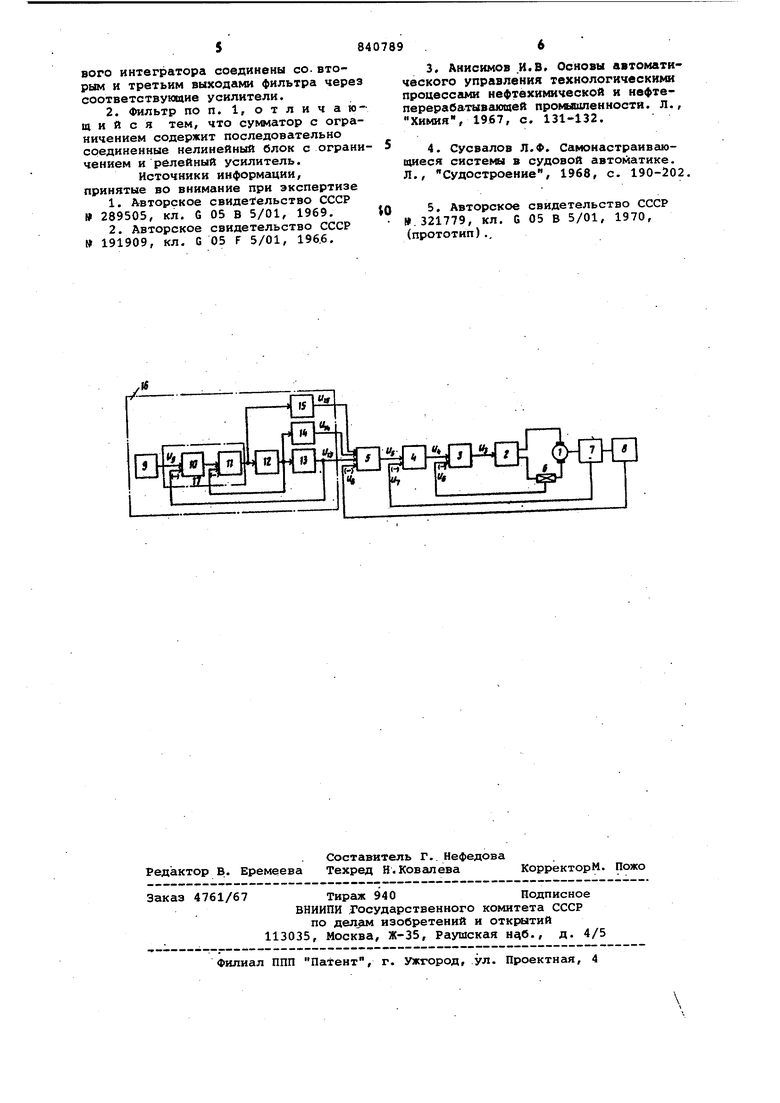
Изобретение относится к сглаживаю щий устройствам систем автоматического регулирования и может быть использовано для сглаживания ступенчатого сигнала.задания в позиционных электроприводах, от которых требуется отрабатывать заданное перемещение с ускорением, не зависящим от ве личины статического момента в системах регулирования скорости с ограничением рывка. По основному авт. св. 321797 известны фильтры, -содержащие последо вательно соединенные элементы сравнения, не.линейные блоки, охваченные обратными связями, и интеграторы, причем выход последнего интегратора соединен с одним из входов элемента сравнения, а в качестве нелинейных блоков применяются релейные усилители или линейные усилители с зоной насыщения l, 2, з и |.4J. Наиболее близким к предлагаемому является фильтр, содержащий последо вательно соединенные источник переменного сигнала, сумматор с ограничением и первый интегратор, выход которого соединён со вторым входом сумматора с ограничением и через второй интегратор - третьим входо сумматора с ограничением и первым выходом фильтра 5. Однако фильтр обладает низкими сглаживающими свойствами, вследствие чего позиционный привод с таким фильтром имеет низкую точность позиционирования при наличии статического момента. Цель изобретения - повышение сглаживающих свойств фильтра. Поставленная цель достигается тем, что в фильтре установлены два усилителя, причем выходы сумматора с ограничением и первого интегратора соединены со вторым и третьим выходами фильтра через соответствующие усилители, а сумматор с ограничением содержит последовательно соединенные нелинейный блок- с ограничением и релейный усилитель. На чертеже представлена схема электропривода с предлагаемым фильтром. Электропривод состоит из двигателя 1 постоянного тока, усилителя 2 мощности, регуляторов тока 3, скорости. 4 и положения 5, датчиков 6 тока, скорости 7 и положения 8, источник 9 переменного сигнала, последовательно соединенные нелинейный
блок с ограничением 10,, релейный усилитель 11 и два интегратора 12 и 13, выход последнего из которых (13) соединен со вторым входом нелинейного блока 10 и первым входом регулятора 5 положения, выход первого интегратора 12 - со входом релейного усилителя 11 и через первый усилитель 14 - со вторым входом регулятора 5 положения, а выход релейного усилителя 11 соединен с третьим входом регулятора 5 положения через второй усилитель 15. Нелинейный блок 10 выполняет операцию извлечения квадратного корня из разности задающего сигнала U, с выхода источника 9 и выходного сигнала интегратора 13 и может быть реализован на операционном усилителе, в обратную связь которого включен квадратичный преобразователь. Элементы 9-15 входят в состав фильтра 16. В состав сумматора 17 с ограничением функционально входят нелинейный блок 10 с ограничением и релейный усилитель 11.
и - выходной сигнал i-го функ- / ционального блока.
Предлагаемый фильтр в составе позиционного электропривода работает следующим образом.
Основной задающий сигнал U для. позиционного электропривода формируется в источнике 9 переменного сигнала. Затем сигнал Up преобразуется в задающий сигнал и для контура регулирования положения, -соответствующий требуемому закону его изменения, с помощью интегратора 13 фильтра 16. Усилители 14 и 15 формируют корректирующие сигналы и пропорциональные, соответственно, первый и второй производным от Зсодающего сигнала U . и помогающие в значительной степени скомпенсировать инерционность электропривода и уменьшить отклонение выходной координаты и электропривода от требуемого закона движения.
Управление положением осуществляется подачей ступенчатого сигнала Ug на вход нелинейного блока. 10 фильтра 16. При этом релейный усилитель 11, а при достаточно, большом входном сигнале и нелинейный блок 10 насыщается. На вход интегратора 12 поступает постоянный сигнал, который преобразуется им в линейно нарастаюий сигнал, а интегратором 13 - в игнал, изменяющийся ПО параболичесому закону. Когда выходной сигнал ервого интегратора 12 достигает ровня ограничения нелинейного блока 10, выходной сигнал релейного силителя 11 становится равным нулю, нтегратор 12 прекращает интегрировать, но выходной сигнал интегратоа 13 нарастает по линейному закону о тех пор, пока нелинейный блок 10 не выйдет из состояния насыщения. осле этрго нелинейный блок 10 преобразовывает разность входного сигнала U9 задания и выходного сигнала Ц| интегратора 13 таким образом, что релейный усилитель 11 удерживается в состоянии насыщения с противоположным знаком. Выходной сигнал интегратора 12 линейно уменьшается , а выходной сигнал интегратора 13 изменяется по параболе до тех по пока не достигнет величины сигнала Up задания. После этого выходные синалы блоков 10, 11 и 12 становятся равными нулю, а выходной сигнал интегратора 13 остается постоянным.
Благодаря тому, что элементы фильтра являются практически безынеционными, можно обеспечить высокую точность воспроизведения задающего воздействия. Требуемое качество переходных процессов достигается настройкой контуров регулирования и выборомкоэффициентов усиления усилителей 14 и 15.
Коэффициент усиления регулятора положения выбирают из условия обеспечения требуемых динамических свойств электроприводов при отработке малых перемещений.
, При этом он оказывается намного больше, чем в типовом электропривод с линейным регулятором положения, где он обычно выбирается из условия оптимальной отработки перемещения с максимальным тормозным путем.
Преимуществом изобретения является обеспечение хороших сглаживающих свойств в фильтре и достижение за счет этого более высоких значений быстродействия и точности электропривода. Кроме того, дополнительное повышение точности достигается за счет большего коэффициента усиления регулятора положения и введения в законуправления сигналов, пропорциональных первой и второй производным от задающего воздействия.
По .сравнению с электроприводом с нелинейным регулятором положения электропривод с предлагаемым фильтром имеет более простую статическую характеристику нелинейного звена, возможность его настройки независим от контура положения.л, кроме того, более высокое быстродействие при отработке перемещений, при которых тормозной ток в системе с нелинейны регулятором положения не достигает установившегося значения.
Формула изобретения
3,Анисимов .и.в. Основы автоматического управления технологическими процессами нефтехимической и нефтеперерабатывающей промышленности. Л., Химия, 1967, с. 131-132.
