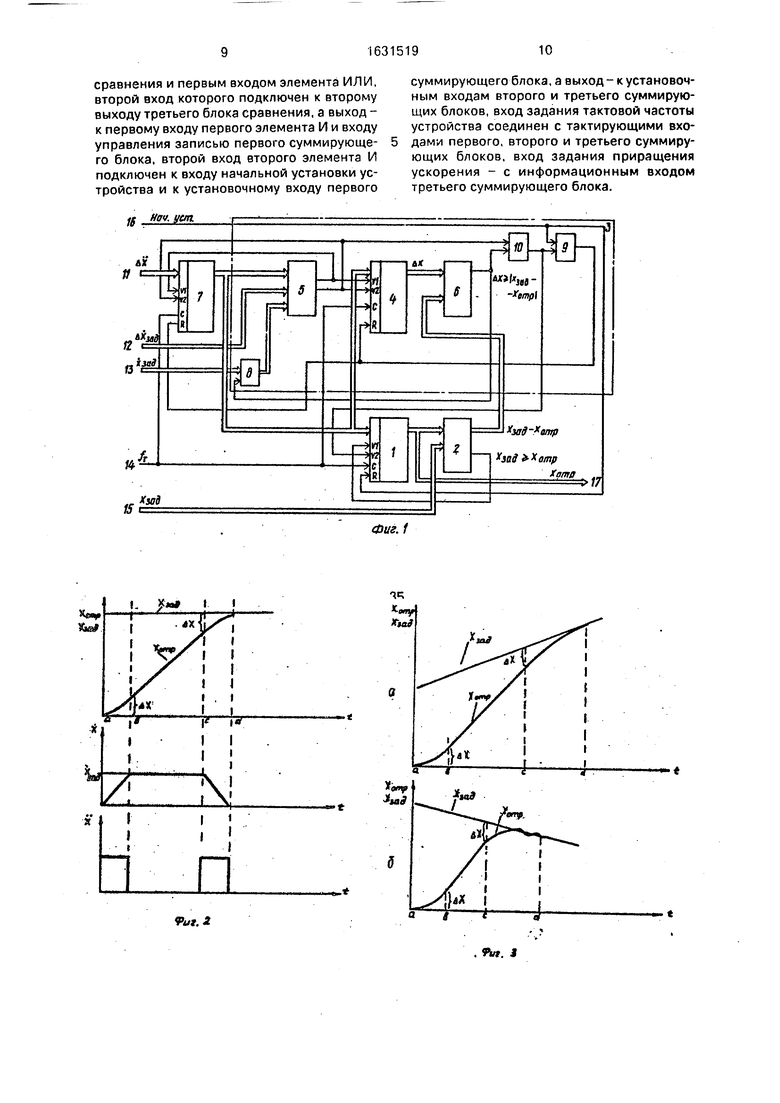
И 9, элемент И/ill SO, вход I i задания приращения ускорения, вход 12 задания допу- с а сравнения скоростей, вход 13 задания скорости, вход 14 задания частоты такто- аой, вход 15 задания координаты заданной, вход 16 задания начальных установок и выход 17 координаты отработанной.
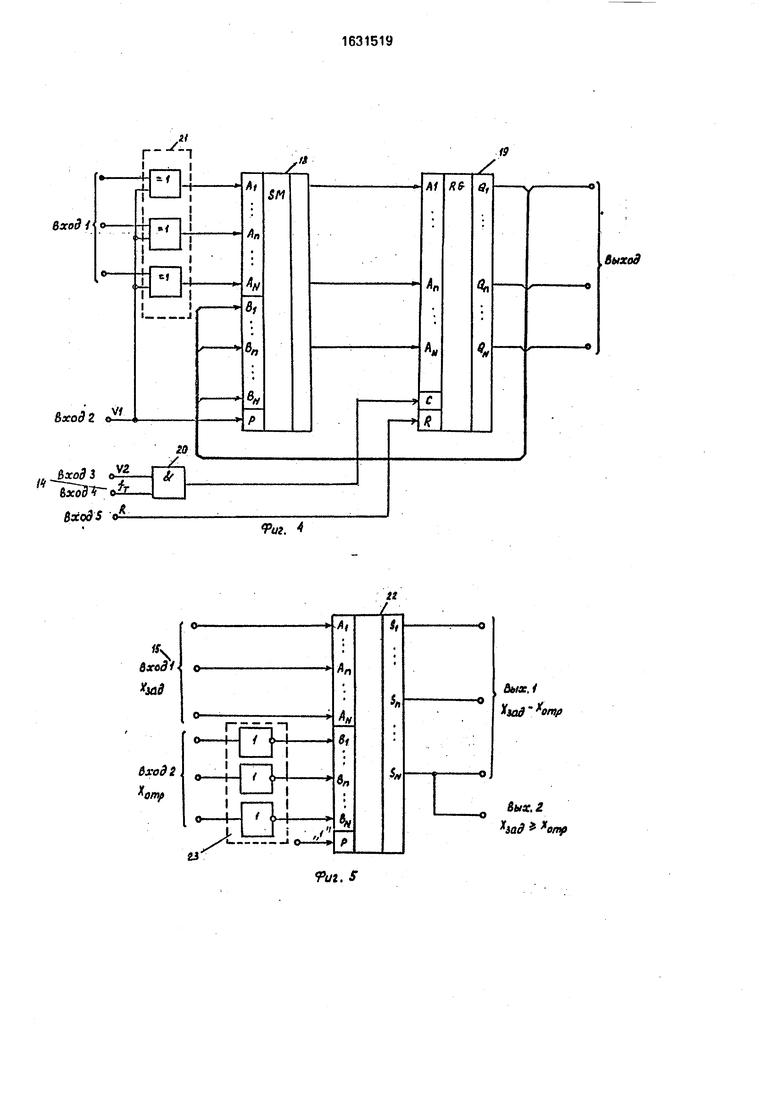
Суммирующие блоки 1, 4 и 7 (фиг. А содержат параллельный N-разрядный сумматор 18, параллельный N-разрядный регистр 19, элемент 1/1 20 и группу элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 21.
Суммирующий блок работает следующим образом.
На первый вход блока поступает параллельный двоичный W-разрядчый код суммируемой величины, знак которой определяется сигналом, поступающим на второй вход V. На четвертый вход поступает последояагельность импульсов тактовой частоты, а на i ретий вход V2 - сигнал, управляющий запись результата суммирования содержимо магистра 19 и поступающий на первый вход суммирующего устройства. По пятому входу осуществляется установка ре- i лсфсЭ 19 в исходное состояние, в том числе А после включения питания, например, воучную рт кнопки,
Блок 2 сравнения (фиг. 5) содержит параллельный N-разрядный сумматор 22, группу элементов НЕ 23, первый вход 15, на который поступает параллельный двоичный код заданной координаты ХЗАД, второй вход, на который поступает параллельный двоичный код координаты отработанной ХОТР, первый выход, с которого снимается параллельный двоичный код разности заданной и отработанной координат ХЗАД - ХОТР, второй выход, являющийся знаковым разрядом разности, использующийся для определения результата сравнения: при нулевом сигнале на втором выходе заданная координата больше или равна координате отработанной ХЗАД51 ХОТР; при единичном спгнале на втором выходе заданная координата меньше отработанной ХЗАД ХОТР.
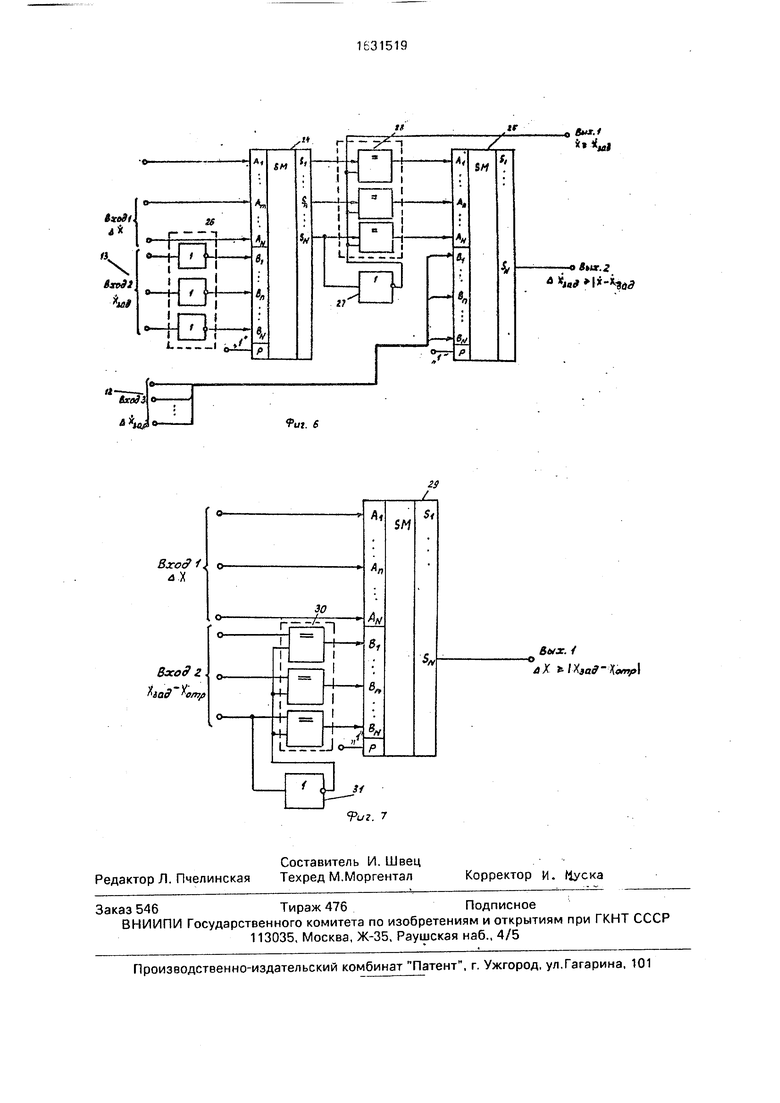
Блок 5 сравнения ( фиг,6) производит сравнение скорости отработанной соскоро- с i ью заданной с точностью допуска и содер- i.nr параллельные N-разрядные сумматоры 2 ь н 25, группу элементов НЕ 26, элемент НЕ 27, группу элементов исключающее ИЛИ 28, первый вход,яплягощийся входом для тммируомой величины приращения спи /1 АХ, второй вход 13, являющийся в/сдим для вгороп суммируемой величины - скорости заданной, третий 12, являющийся входом для величины допуска А ХЗАД при сравнении скоростей заданной
и отработанной, первый выход, являющийся старшим (знаковым) разрядом разности скоростей отработанной и заданной, равной единичному значению при условии, что
скорость отработанная больше или равна скорости заданной X ХЗАД, и нулевому значению при условии,что скорость отработанная меньше скорости заданной X ХЗАД; второй выход, являющийся старшим (знаковым) разрядом разности допуска и абсолютной разности отработанной и заданной скоростей, равный нулевому значению при условии, что величина допуска больше или равна абсолютной разности скоростей отработанной и заданной А ХЗАД I X - ХЗАД I , и единичному значению при невыполнении этого условия.
Сумматор 24 и группа элементов НЕ 26 формируют разность скорости отработанной X и скорости заданной ХЗАД (Я - ХЗАД), при этом величина скорости отработанной АХ образуется путем сдвига параллельного двоичного кода приращения скорости АХ на m разрядов в сторону старших разрядов,
где АХ- приращение скорости за время одного такта, m - параметр, определяемый значением тактовой частоты f 2m Гц.
С помощью группы элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 28, элемента НЕ 27 и сумматора 25 формируется разность А ХЗАД 4х ХЗАД), старший (знаковый) разряд которой является вторым выходом схемы сравнения. Блок 6 сравнения (фиг. 7), содержит сумматор 29, группу элементов ИСКЛЮЧАЮЩЕЕ ИЛИ 30, элемент НЕ 31, первый и второй входы для параллельных двоичных кодов величин координаты разгона А X и разности координат заданной и отработанной соответственно, первый выход.
Блок формирует разнос ь величин координаты разгона АХ и абсолютной разности координат заданной и отработанной АХ - (ХЗАД - ХОТР.).
Старший (знаковый) разряд разности
является выходным сигналом схемы сравнения АХ I ХЗАД. -Хотр.I, равный нулевому значению при выполнении этого неравенства и единичному при невыполнении последнего.
Выходные сигналы устройства: приращение ускорзния АХ, допуск А ХЗАД, скорость заданная ХЗАД, координата заданная ХЗАД., задаются параллельным двоичным М-разряд- ным кодом, тактовая частота определяется
выражением f 2m Гц, сигнал начальных установок задается нулевым сигналом с кнопки, выходной сигнал - координата отработанная ХОТР, выражается параллельным двоичным N-разрядным кодом.
Устройство для автоматического разгона и торможения работает следующим образом.
Установка устройства в исходное состояние осуществляется сигналом Начальная установка (НУ). Нулевой сигнал НУ поступает на R-вход суммирующего блока 1, через элемент И 9 на R-входы суммирующих блоков 4 и 7, устанавливая их в исходное состояние. При этом на первом выходе блока 2 сравнения присутствует нулевой двоич- ный код, равный разности нулевых двоичных кодов ХЗАД и ХОТР, поступающих соответственно с выхода суммирующего устройства 1 с входа задания координат 16.
На выходе блока б сравнения присутствует нулевой сигнал, так как выполняется условие Л X (ХЗАД - ХОТР) 0. Нулевой сигнал с выхода блока 6 сравнения поступает на элемент И 8, формируя на его выходе нулевой двоичный код,
Блок 5 сравнения при сравнении нулевых двоичных кодов, поступающих на первый и третий входы, формирует на втором выходе нулевой сигнал (выполняется условие ДХзАд5: I ХзаА -XI, запрещающий суммирование в устройствах 4 и 7.
С выхода элемента ИЛИ 10 нулевой сигнал запрещает суммирование в блоке 1.
При поступлении на второй вход блока 2 сравнения ненулевого двоичного кода координаты заданной ХЗАД const на первом выходе блока вырабатывается двоичный код разности ХЗАД - ХОТР, отличный от нулевого, на втором выходе - нулевой сигнал, так как выполняется условие ХЗАД ХОТР.
На выходе блока сравнения 6 формируется единичный сигнал (выполняется условие А Х I ХЗАД - ХОТР I), разрешающий через элемент ИЛИ 10 суммирование в блоке 1 и прохождение двоичного кода скорости заданной ХЗАД через элемент И 8 на третий вход блока 5 сравнения.
Блок 5 сравнения вырабатывает нулевой сигнал на первом выходе (выполняется условие ХЗАД X) и единичный сигнал на втором выходе (не выполняется условие ДХзАД ЧХзАД - X | . Двоичный код приращения скорости ДХ, координаты отработанной ХОТР и координаты разгона А X на выходах суммирующих блоков 7, 1 и 4 соответственно увеличивается (участок ав на фиг. 2).
Релизуется равноускоренное движение.
При выполнении условий ДХзАД IX - ХЗАД jt на втором выходе блока сравнения 5 формируется нулевой сигнал, запрещающий по входам V2 суммирование в блоках 4 и 7.
Двоичные коды величин АХ и А X на выходах суммирующих блоков 4 и 7 соответственно постоянные, двоичный код координаты отработанной ХОТР. на выходе суммирующего блока 1 равномерно увеличивается (участок вс на фиг. 2). Реализуется равномерное движение.
При выполнении условия ДХ |ХзддХОТР. на выходе блока 6 сравнения вырабатывается нулевой сигнал, поступающий на второй вход блока элементов И 8, на выходе которого формируется нулевой двоичный код, поступающий на третий вход блока 5 сравнения.
На первом и втором выходах блока 5 сравнения вырабатываются единичные сигналы (не выполняются условия ХЗАД X,
ДХзАД.|ХзАД. - Х|),поступающие на управляющие входы V1 и V2 суммирующих блоков 4 и 7.
Координата разгона А X, приращение скорости АХ на выходах суммирующих блоков 4 и 7 соответственно равномерно уменьшаются , координата отработанная на выходе суммирующего блока 1 равнозамедленно увеличивается.
В блоке сравнения 5 происходит сравнение допуска . с уменьшающейся разностью (ХЗАД. - X), при выполнении неравенства А ХЗАД. 1Хздд. -X 1, на втором выходе блока 5 сравнения формируется нулевой сигнал, поступающий на первый вход
элемента ИЛИ 10 и запрещающий суммирование в блоках 4 и 7. Нулевой сигнал с выхода элемента ИЛИ 10 запрещает суммирование в блоке 1.
Нулевой сигнал с выхода элемента И 9
устанавливает суммирующие блоки 4 и 7 в исходное состояние.
Формирование координаты ХОТР закончилось ХОТР. ХЗАД.
Благодаря наличию обратных связей устройство обеспечивает формирование управляющих сигналов для вывода объекта на изменяющуюся координату при скорости заданной ЯЗАД., большей программной скорости изменения координаты.
Возможно два режима: догон и встречное движение.
Догон: заданная координата ХЗАД. увеличивается. Координата отработанная увеличивается.
До момента времени, когда координата разгона ДХ сравняется с абсолютной разностью координат заданной и отработанной (ХЗАД. - ХОТР.) (точка на фиг. За), процесс формирования координаты ХОТР. аналогичен формированию координаты ХОТР., описанному при ХЗАД. const.
После первого выполнения неравенства АХ (ХЗАД. - ХОТР.) возникает . равнозэ- медленное движение, однако в дальнейшем при увеличении координаты заданной ХЗАД. выполнение этого неравенства может.нарушаться, что приведет к разгону(равноускоренному движению), а затем к торможению (равнозамедленному движению).
Процесс разгона-торможения продолжается до того момента времени, когда координата отработанная не станет равной координате заданной (участок cd на фиг. За).
Встречное движение: заданная коорди- ната ХЗАД. уменьшается. Координата отработанная увеличивается. Диаграмма дана на фиг. 36.
Процесс формирования координаты Хотр. на участках равноускоренного и рав- номерного движения (ав и вс на фиг. 36) аналогичен процессу при формировании координаты отработанной ХОТР., описанному при ХЗАД. const. При выполнении неравенства АХ |ХзАД. - ХотР.|(точка С на фиг. 36) начинается равнозамедленное движение. При этом разность (Хздд. - ХОТР.) уменьшается быстрее, чем убывают величина координаты разгона АХ и приращение скорости АХ.
При выполнении условия ХОТР. ХЗАД. выполняются условия А X ХЗАД. - ХОТР.), АХЗАД |Хздд. - XOTP.I. Координата ХОТР. равнозамедленно увеличивается. При ХОТР. X ЗАД. меняется знак суммирования в суммирующем блоке 1 по входу V1,
Координата ХОТР. уменьшается. Около программной траектории ХЗАД. возможны колебания ХОТР. с амплитудой, равной приращению координаты ХОТР. за один такт.
При выполнении условия АХздд |ХзАД.Х( формирование ХОТР. заканчивается, объект выходит на программную траекторию.
Поскольку сравнение скоростей задан- ной Хзад. и отработанной X производится с допуском А ХЗАД., при выводе объекта на изменяющуюся координату программной траектории возможна небольшая погрешность. Поэтому после окончания вывода двигателя на программную траекторию при требовании высокой точности отработки данное устройство рекомендуется отключать 1.1 переключать на программную координату.%
В конкретном устройстве при тактовой частоте f 218 Гц и тридцатидвухразрядных двоичных кодах угловых величин координат, скоростей и ускорений при скорости
заданной ХЗАД 8°26 , приращении ускорения А ХЗАД. 0,0012 допуске А ХЗАД. 4,97 точность отработки координаты равна 0,1 .
Таким образом, предлагаемое устройство для автоматического разгона и торможения формирует координаты равноускоренного движения при разгоне и равнозамедленного движения при торможении,
При использовании его для управления приводом обеспечивается плавный разгон и торможение при выводе объекта на программную координату, что позвляет исключить резкие механические нагрузки на элементы привода. В отличие от прототипа предлагаемое устройство обеспечивает формирование траектории вывода на изменяющуюся координату.
Благодаря этому допускается совместная работа предложенного устройства и устройств расчета программной траектории, что приводит к повышению оперативности управления.
Формула изобретения Устройство для автоматического управления разгоном и торможением движущегося по заданной траектории объекта, содержащее первый суммирующий блок, выход которого соединен с выходом устройства и с первой группой входов первого блока сравнения, вторая группа входов которого подключена к входу задания координаты, первый выход - к знаковому входу первого суммирующего блока, второй выход - к первой группе входов втрого блока сравнения, вторая группа входов которого подключена к группе выходов второго суммирующего блока, знаковый вход которого соединен с первым выходом третьего блока сравнения, вход управления записью - с вторым выходом третьего блока сравнения, первая группа входов которого соединена с входом задания допуска сравнения скоростей, отличающееся тем, что, с целью расширения области применения, в него введены элемент ИЛИ, первый элемент И, блок элементов И и третий суммирующий блок, знаковый вход и вход управления записью которого соединены соответственно с первым и вторым оыхода- ми третьего блока сравнения, выхо, ,ы третьего суммирующего блока подключены к второй группе входов третьего блока сравнения и группам информационных входов первого и второго суммирующих блоков, третья группа входов блкоа сравнения подключена к выходу блока элементов И, группа входов которого соединена с входом задания скорости устройства, вход блока элементов И - с выходом второго блока
сравнения и первым входом элемента ИЛИ второй вход которого подключен к второму выходу третьего блока сравнения, а выход - к первому входу первого элемента И и входу управления записью первого суммирующего блока, второй вход второго элемента И подключен к входу начальной установки устройства и к установочному входу первого
суммирующего блока, а выход - к установочным входам второго и третьего суммирующих блоков, вход задания тактовой частоты устройства соединен с тактирующими входами первого, второго и третьего суммирующих блоков, вход задания приращения ускорения - с информационным входом третьего суммирующего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| Цифровая система управления | 1984 |
|
SU1229724A1 |
| Генератор векторов | 1985 |
|
SU1278926A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Генератор векторов | 1988 |
|
SU1596375A2 |
| Устройство для поворота вектора (его варианты) | 1982 |
|
SU1078431A1 |
| Цифровой преобразователь координат | 1980 |
|
SU942004A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1493408A1 |
1S
нач ист.
Vut.i
. «w. J
..-Ј
«;
6хед1 ХМ$
бход2 omf
ui.S
19
йых,1
Вых. 2 ьад
Вход 1.
Вход г
ла от/
Вых. /
Л К IX3aff-)(mp
| Устройство для автоматического раз-гОНА и ТОРМОжЕНия дВигАТЕля CTAHKA СпРОгРАММНыМ упРАВлЕНиЕМ | 1975 |
|
SU834669A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для автоматического разгона и замедления двигателя станка с программным управлением | 1983 |
|
SU1120287A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
