Изобретение относится к машиностроению и может быть использовано для автоматизации загрузочных и транспортных процессов.
Цель изобретения - повышение надежности.
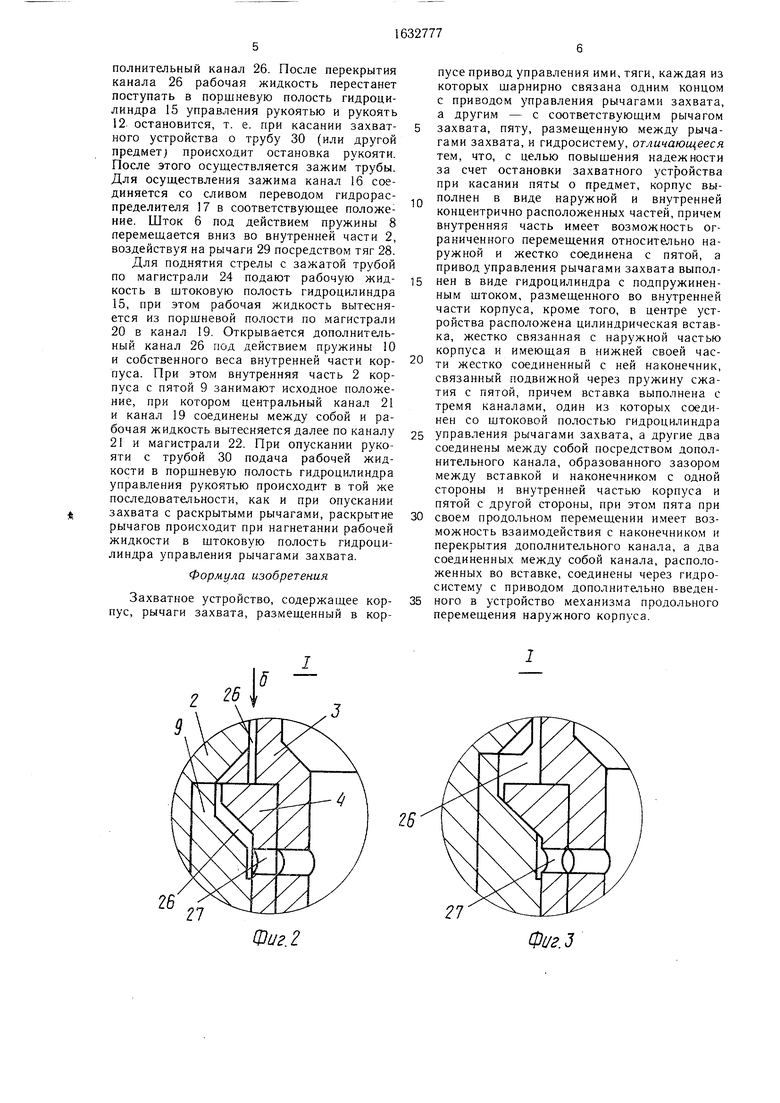
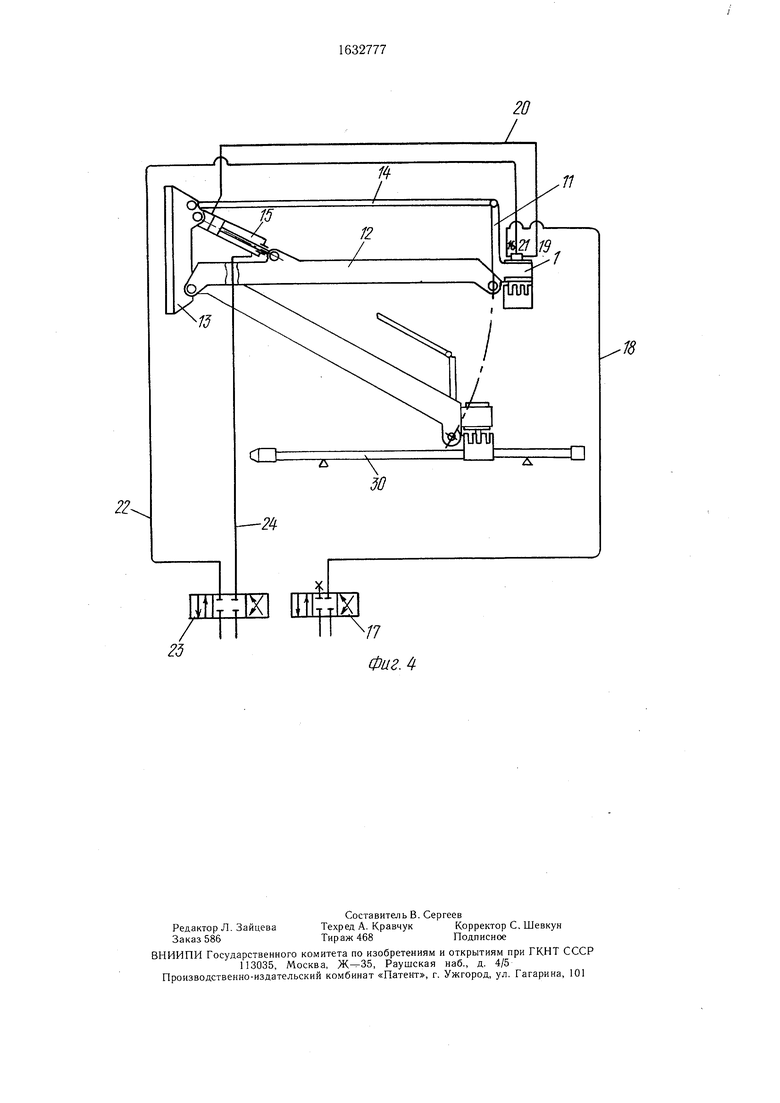
На фиг. 1 представлено захватное устройство, общий вид; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - то же, с закрытым каналом; на фиг. 4 - захватное устройство с приводом перемещения.
Захватное устройство включает корпус, состоящий из наружной 1 и внутренней 2 частей. Внутренняя часть подвижна относительно наружной. С наружной частью жестко связана вставка 3, размещенная на продольной оси симметрии устройства. На вставке 3 жестко установлен наконечник 4. Во внутренней части 2 выполнено симметрично продольной оси симметрии отверстие 5, в котором размещен гидроцилиндр управления рычагами захвата со штоком 6 и поршнем 7., Шток 6 подпружинен тарельчатой пружиной 8 относительно внутренней части 2 корпуса. Во внутренней (подвижной) части 2 корпуса жестко смонтирована пята 9. Пята 9 установлена относительно наконечника 4 с зазором, в котором между горизонтальными плоскостями пяты 9 и наконечника 4 размещена пружина 10. Захват размещен на рычаге 11, шарнирно связанном с рукоятью 12, шарнирно установленной на раме 13 (или стреле манипулятора). Параллельно рукояти 12 размещена тяга 14, шарнирно связанная с рамой 13 и с противоположным от захвата концом рычага 11. Рукоять 12 управляется гидроцилиндром 15, шарнирно связанным с ней и с рамой 13. Во вставке 3 выполнены три канала. Канал 16 связан с гидрораспределителем 17 управления рычагами захвата гидромагистралью 18, канал 19 связан с поршневой полостью гидроцилиндра 15 управления рукоятью гидромагистралью 20, а канал 21 (центральный) связан магистралью 22 с гидрораспределителем 23 управления рукоятью, который магистралью 24 соединен со штоковой полостью гидроцилиндра 15. Канал 16 имеет
выход 25 в штоковую полость гидроцилиндра управления рычагами захвата. Выход 25 переходит в кольцевой канал, по которому рабочая жидкость поступает в што0 ковую полость гидроцилиндра управления рычагами захвата. Канал 21 соединен с каналом 19 посредством дополнительного канала 26, образованного зазором между вставкой 3 и внутренней частью 2 корпуса, переходящим в зазор между пятой 9
5 и наконечником 4, и кольцевой проточкой 27. Со штоком 6 гидроцилиндра управления рычагами захвата шарнирно связаны тяги 28, другой конец каждой из которых шарнирно связан с рычагом 29 захвата. Устройство работает следующим образом.
0 Чтобы наклонить рукоять 12 при наведении захватного устройства на предмет, необходимо подать рабочую жидкость в поршневую полость гидроцилиндра 15 управления рукоятью (фиг. 4). Через гидрораспределитель 23 управления рукоятью по магист5 рали 22 рабочая жидкость поступает в центральный канал 21, проходит по дополнительному каналу 26 и по кольцевой проточке 27 в канал 19 и через него по магистрали 20 попадает в поршневую полость
0 гидроцилиндра 15 управления рукоятью. Рукоять наклоняется, при этом захват перемещается плоско-параллельно из-за параллельности рукояти 12 и тяги 14. При опускании рукояти 12 рычаги захватного устройства должны быть раскрыты.
5 Рычаги 29 раскрываются при подаче рабочей жидкости через гидрораспределитель 17 по магистрали 18 в канал 16 и по нему в штоковые полости гидроцилиндра управления рычагами захвата. Поршень
7и шток 6, перемещаясь вверх с помощью 0 тяг 28, открывают .рычаги захвата 29.
8процессе опускания рукояти захваты раскрыты, а канал 16 отсоединен гидрораспределителем 17 от слива и нагнетания.
Когда захват опустится до упора пятой о захватываемый предмет 30 (например, 5 бурильную трубу), пята вместе с внутренней частью корпуса перемещается вверх, сжимая пружину 10 и выбирая зазор между пятой и наконечником, перекрывая дополнительный канал 26. После перекрытия канала 26 рабочая жидкость перестанет поступать в поршневую полость гидроцилиндра 15 управления рукоятью и рукоять 12 остановится, т. е. при касании захватного устройства о трубу 30 (или другой предмет; происходит остановка рукояти. После этого осуществляется зажим трубы. Для осуществления зажима канал 16 соединяется со сливом переводом гидрораспределителя 17 в соответствующее положение. Шток 6 под действием пружины 8 перемещается вниз во внутренней части 2, воздействуя на рычаги 29 посредством тяг 28. Для поднятия стрелы с зажатой трубой по магистрали 24 подают рабочую жидкость в штоковую полость гидроцилиндра 15, при этом рабочая жидкость вытесняется из поршневой полости по магистрали 20 в канал 19 Открывается дополнительный канал 26 под действием пружины 10 и собственного веса внутренней части корпуса. При этом внутренняя часть 2 корпуса с пятой 9 занимают исходное положение, при котором центральный канал 21 и канал 19 соединены между собой и рабочая жидкость вытесняется далее по каналу 2 и магистрали 22. При опускании рукояти с трубой 30 подача рабочей жидкости в поршневую полость гидроцилиндра управления рукоятью происходит в той же последовательности, как и при опускании захвата с раскрытыми рычагами, раскрытие рычагов происходит при нагнетании рабочей жидкости в штоковую полость гидроцилиндра управления рычагами захвата.
Формула изобретения
Захватное устройство, содержащее корпус, рычаги захвата, размещенный в кор
пусе привод управления ими, тяги, каждая из которых шарнирно связана одним концом с приводом управления рычагами захвата, а другим - с соответствующим рычагом захвата, пяту, размещенную между рычагами захвата, и гидросистему, отличающееся тем, что, с целью повышения надежности за счет остановки захватного устройства при касании пяты о предмет, корпус выполнен в виде наружной и внутренней концентрично расположенных частей, причем внутренняя часть имеет возможность ограниченного перемещения относительно наружной и жестко соединена с пятой, а привод управления рычагами захвата выполнен в виде гидроцилиндра с подпружиненным штоком, размещенного во внутренней части корпуса, кроме того, в центре устройства расположена цилиндрическая вставка, жестко связанная с наружной частью корпуса и имеющая в нижней своей части жестко соединенный с ней наконечник, связанный подвижной через пружину сжатия с пятой, причем вставка выполнена с тремя каналами, один из которых соединен со штоковой полостью гидроцилиндра
5 управления рычагами захвата, а другие два соединены между собой посредством дополнительного канала, образованного зазором между вставкой и наконечником с одной стороны и внутренней частью корпуса и пятой с другой стороны, при этом пята при
0 своем продольном перемещении имеет возможность взаимодействия с наконечником и перекрытия дополнительного канала, а два соединенных между собой канала, расположенных во вставке, соединены через гидросистему с приводом дополнительно введен5 ного в устройство механизма продольного перемещения наружного корпуса.
0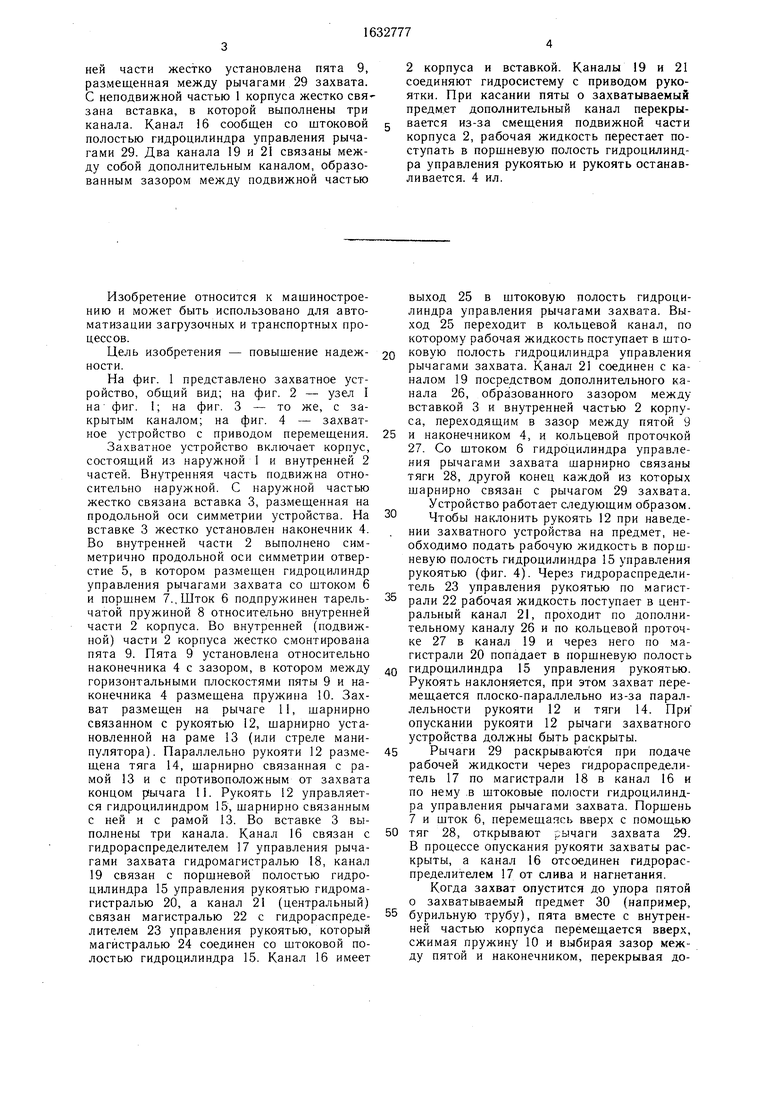
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочее оборудование одноковшового экскаватора | 1982 |
|
SU1027338A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| Гидропривод манипулятора лесозаготовительной машины | 1978 |
|
SU697100A1 |
| Агрегат бурильный | 1980 |
|
SU1002569A1 |
| Экскаваторный рабочий орган проходческого щита | 1984 |
|
SU1218124A2 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Рабочее оборудование гидравлического экскаватора | 1986 |
|
SU1382914A2 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1680887A1 |
| Устройство для проходки тоннелей | 1987 |
|
SU1510450A1 |
Изобретение относится к машиностроению и может быть использовано для автоматизации загрузочных и транспортных работ. Цель изобретения - повышение надежности. Захватное устройство состоит из рукоятки и неподвижной части 1 корпуса, в котором расположена подвижная часть корпуса 2 В подвижной части 2 корпуса в свою очередь расположен гидроцилиндр управления рычагами 29 захвата, а в ниж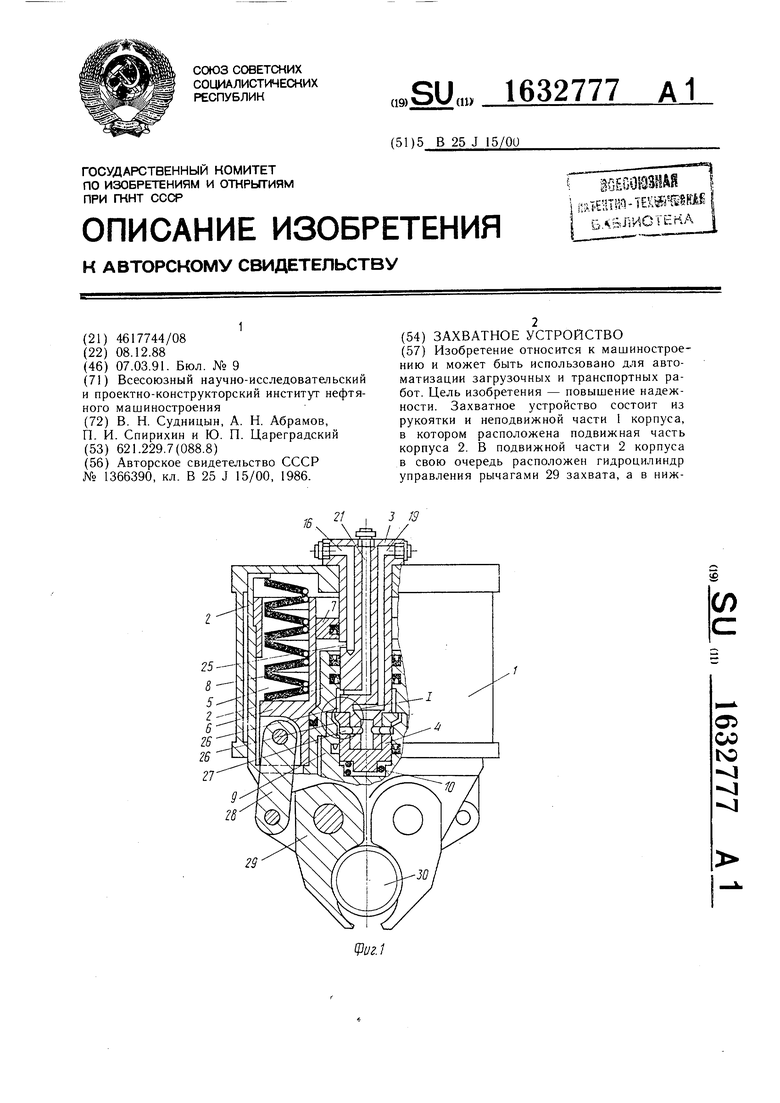
9
Фиг. 2
Фиг.З
25
.77
19,i
| Захватное устройство | 1986 |
|
SU1366390A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
