}9
(Л
00
65
05
со ;о
гидроцилиндра 2, соприкасается с ней и перемещает шток 4 вверх. Поршень основного гидроцилиндра 2 вытесняет рабочую среду по каналам 23 и 24 в каждую из рабочих полостей дополнительных гидроцилиндров 3, синхронизированные планкой 6 штоки 7 которых поворачивают посредством тяг 8 захватные рычаги 9 вокруг оси 10, пос66390
редством которых последние закреплены на фланце 11 корпуса 1, Захватные рычаги 9 с зажатой в яих заготовкой 19 фиксируются под воздействием электромагнитного фиксатора, сердечник-упор 21 которого взаимодействует с Ответным упором 22, установленным на втором штоке 20 основного гидроцилиндра 2. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ЛОМКИ ПРУТКОВЫХ И ТРУБЧАТЫХ МАТЕРИАЛОВ | 1990 |
|
RU2025231C1 |
| Захватное устройство | 1988 |
|
SU1632777A1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 1998 |
|
RU2130866C1 |
| АЭРОДРОМНЫЙ ГИДРОАГРЕГАТ ДЛЯ ОБСЛУЖИВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2067953C1 |
| Машина для формования пяточной части заготовки верха обуви | 1984 |
|
SU1266515A1 |
| Грузозахватное магнитное устройство | 1978 |
|
SU897692A1 |
| Устройство для групповой газовойРЕзКи HA МЕРНыЕ зАгОТОВКи | 1979 |
|
SU846152A1 |
| Устройство для выпрессовки цилиндрических деталей | 1989 |
|
SU1798155A1 |
| Манипулирующее устройство | 1982 |
|
SU1093544A1 |
| Опорное устройство полуприцепа | 1988 |
|
SU1583319A1 |
Изобретение относится к машиностроению, в частности к робототехнике. Цель изобретения - повышение надежности за счет выполнения гидросистемы замкнутой и наличия фиксирующего механизма. При подводе захватного устройства к заготовке 19 пята 5, установленная на одном из штоков ,4 двухштокового основного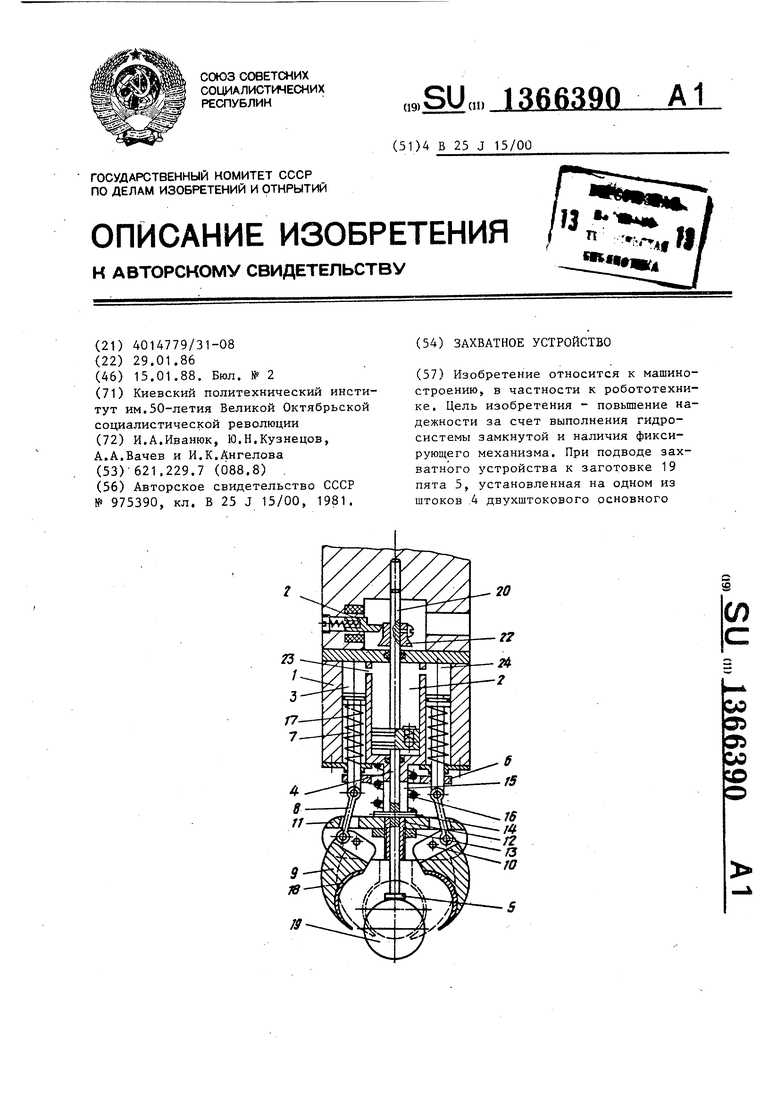
1
Изобретение относится к машиностроению, в частности к робототехнике.
Цель изобретения - повышение надежности за счет выполнения гидросистемы замкнутой и наличия фиксирующего механизма.
На чертеже изображена конструктивная схема захватного устройства.
Захватное устройство состоит из корпуса 1 с размещенными в нем основным 2 и двумя дополнительными 3 гидроцилиндрами. На одном из штокОв 4 двухштокового основного гидроцилиндра 2 жестко установлена пята -5, Синхронизированные планкой 6 штоки 7 каждого из дополнительных гидроцилиндров 3 посредством шарнирно установленных тяг 8 связаны с захватными рычагами 9, каждый из которых шарнирно закреплен посредством осей 10 на фланце 11. Фланец 11 крепится ко втулке 12 корпуса 1, например, гайкой 13. В штоке 4 установлен штифт 14, а во втулке 12 выполнен , параллельный оси корпуса 1. Между штифтом 14 и .корпусом 1 установлена пружина 16, В Ш.ТОКОВЫХ полостях каждого из дополнительных гидроцилиндров 3 установлены пружины 17, В каждом из захватных рычагов 9 со стороны пяты 5 выполнены сменные вкладыши 18, поверхность каждого из которых со сторон пяты имеет форму, соответствующую захватываемой заготовке 19. Второй шток 20 основного гидроцилиндра 2 имеет возможность фиксирования относительно корпуса 1 посредством, например, электромагнитного фиксатора сердечник-упор 21 которого взаимодействует с ответным упором 22. Причем упор 22 имеет возможность регу
5
0
5
0
5
0
лировочного закрепления вдоль штока 20, обеспечивая тем самым изменение длины хода пяты 5, Рабочие полости гидроцилиндров соединены между собой каналами 23 и 24.
Для устранения рабочей жидкости из нижней полости основного гидроцилиндра 2 вследствие перетечек в поршне предусмотрен обратный клапан, который при необходимости может быть установлен,и в поршнях каждого из дополнительных гидроцилиндров 3,Механизм работает следующим образом.
При подводе захватного устройства к заготовке 19 пята 5 соприкасается с ней, а затем перемещается вверх. При этом поршень основного гидроцилиндра 2 вытесняет рабочую жидкость через каналы 23 и 24 в рабочие полости дополнительных гидроцилиндров 3, пбршни которых штоками 7 перемещаются вниз, поворачивая посредством тяг 8 захватные рычаги 9 вокруг осей 10, Пружины 16 и 17 деформируются, аккумулируя энергию разжима захватов 9, Штоки 7 дополнительных гидроцилиндров 3 перемещаются синхронно за счет планки 6. Упор 22 перемещается совместно со штоком 20 и в конце его хода взаимодействует с сердечником- упором 21, фиксируя положение поршня основного гидроцилиндра 2, а вместе с ним и положение поршней и штоков 7 дополнительных гидроцилиндров 3, а также захватных рычагов 9. Разжим заготовки 19 осуществляется подачей управляющего сигнала на электромагнит фиксатора, под воздействием которого сердечник-упор 21 втягивается, освобождая упор 22, а вместе с ним и шток 20 основного гидроцилиндра 2,
который под воздействием пружины 16 перемещается вниз. Поршни дополнительных гидроцилиндров 3 nejpвмещаютс вверх, разводя захватные рычаги 9,
Форму л.а изобретения
Захватное устройство, содержащее корпус, основной гидроцилиндр, на штоке которого жестко установлена пята, дополнительные гидроцилиндры, штоки которых связаны (шарнирно) с захватными рычагами, а рабочие полости гидравлически связаны с одной из полостей основного гидроцилиндра.
отл и.чающееся тем, что, с целью повьш1ения надежности, гидроцилиндры, поршни которых выполнены подпружиненными, объединены одним корпусом, на дополнительно введенном фланце корпуса шарнирно установлены захватные рычаги, связь которых с синхронизированными штоками дополнительных гидроцилиндров Осуществлена посредством тяг, при этом основной гидроцилиндр выполн ен двухштоко- вым, второй шток которого имеет возможность фиксирования относительно
корпуса.
| Механизм для захватывания изделий | 1981 |
|
SU975390A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
