Ј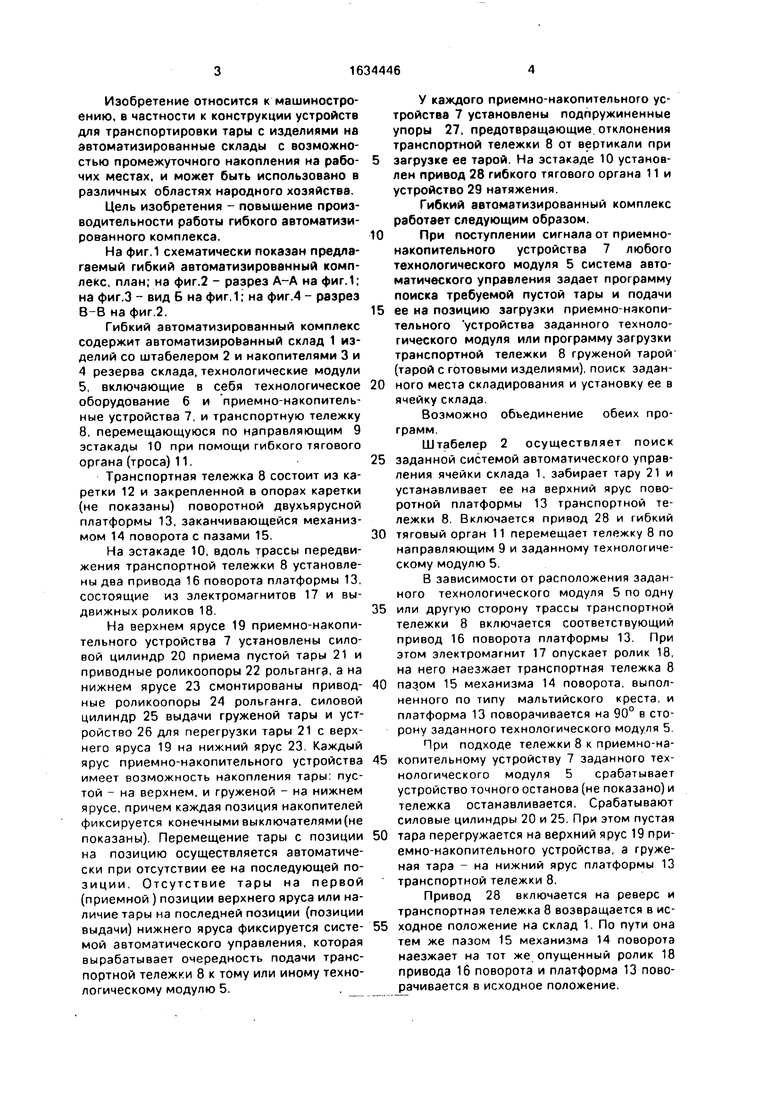
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1987 |
|
SU1549649A1 |
| Автоматизированная транспортно-накопительная система | 1988 |
|
SU1648732A1 |
| Гибкая производственная система листовой штамповки | 1991 |
|
SU1796325A1 |
| АВТОМАТИЗИРОВАННЫЙ ТЕХНОЛОГИЧЕСКИЙ КОМПЛЕКС | 1992 |
|
RU2045384C1 |
| Автоматизированная транспортно-накопительная система | 1985 |
|
SU1306690A1 |
| Тележка распределительного конвейера | 1988 |
|
SU1641740A1 |
| Поточная линия | 1981 |
|
SU959983A1 |
| Транспортно-накопительная система | 1984 |
|
SU1199588A1 |
| Автоматическая линия изготовления изделий из металлических порошков | 1985 |
|
SU1258622A1 |
| Транспортно-накопительная система | 1984 |
|
SU1222502A1 |
Изобретение относится к машиностроению, в частности к конструкциям устройств для транспортировки тары с изделиями на автоматизированные склады с возможностью промежуточного накопления на рабочих местах. Целью изобретения является повышение производительности работы. Гибкий автоматизированный комплекс включает автоматизированный склад изделий со штабелером 2 и накопителями резерва склада 3 и 4, технологические модули 5 с технологическим оборудованием 6 и при- емно-накопительными устройствами 7 и транспортную тележку 8. перемещающуюся по направляющим 9 эстакады 10 при помощи гибкого тягового органа (троса) 11. Транспортная тележка имеет двухъярусную поворотную платформу, ярусы которой соответствуют ярусам приемно-накопитель- ных устройств. Привод поворота платформы размещен на эстакаде 10 1 э.п. ф-лы. 4 ил.
О 00
о
Изобретение относится к машиностроению, в частности к конструкции устройств для транспортировки тары с изделиями на автоматизированные склады с возможностью промежуточного накопления на рабо- чих местах, и может быть использовано в различных областях народного хозяйства.
Цель изобретения - повышение производительности работы гибкого автоматизированного комплекса.
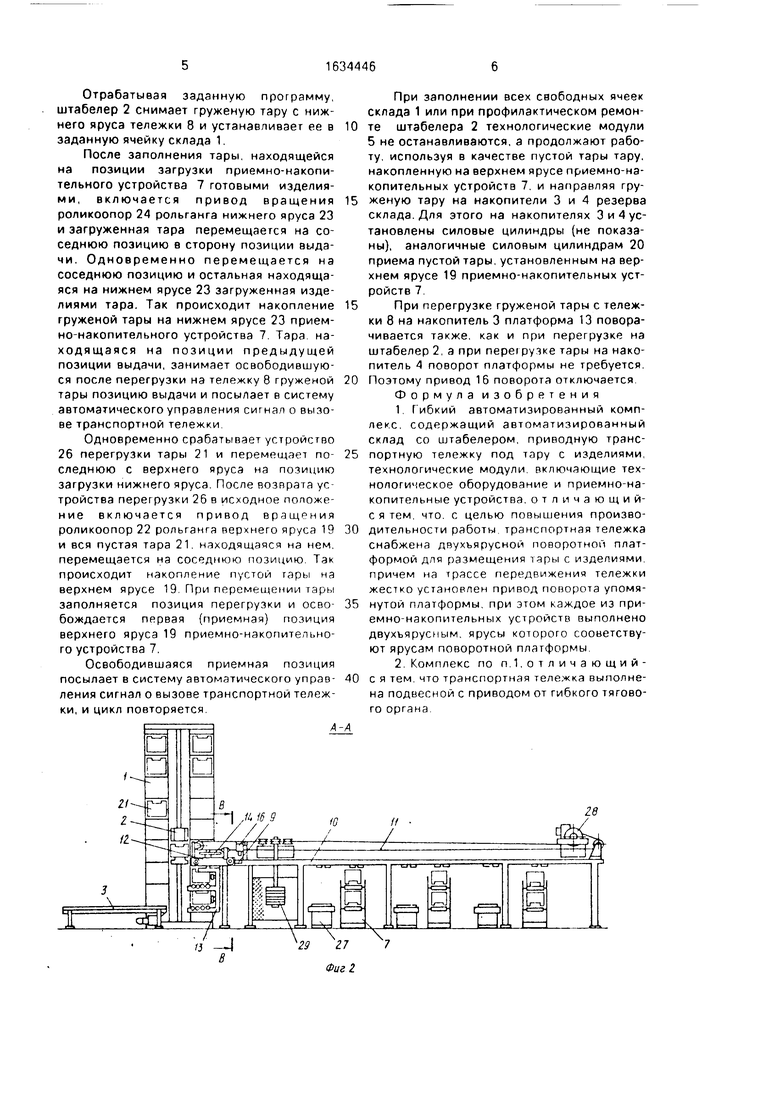
На фиг.1 схематически показан предлагаемый гибкий автоматизированный комплекс, план; на фиг.2 - разрез А-А на фиг.1; на фиг.З - вид Б на фиг.1; на фиг.4 - разрез В-Внафиг.2.
Гибкий автоматизированный комплекс содержит автоматизированный склад 1 изделий со штабелером 2 и накопителями 3 и 4 резерва склада, технологические модули 5, включающие в себя технологическое оборудование 6 и приемно-накопитель- ные устройства 7, и транспортную тележку 8. перемещающуюся по направляющим 9 эстакады 10 при помощи гибкого тягового органа (троса) 11.
Транспортная тележка 8 состоит из каретки 12 и закрепленной в опорах каретки (не показаны) поворотной двухъярусной платформы 13, заканчивающейся механизмом 14 поворота с пазами 15.
На эстакаде 10, вдоль трассы передвижения транспортной тележки 8 установлены два привода 16 поворота платформы 13. состоящие из электромагнитов 17 и выдвижных роликов 18.
На верхнем ярусе 19 приемно-накопи- тельного устройства 7 установлены силовой цилиндр 20 приема пустой тары 21 и приводные роликоопоры 22 рольганга, а на нижнем ярусе 23 смонтированы привод- ные роликоопоры 24 рольганга, силовой цилиндр 25 выдачи груженой тары и устройство 26 для перегрузки тары 21 с верхнего яруса 19 на нижний ярус 23. Каждый ярус приемно-накопительного устройства имеет возможность накопления тары: пустой - на верхнем, и груженой - на нижнем ярусе, причем каждая позиция накопителей фиксируется конечными выключателями (не показаны). Перемещение тары с позиции на позицию осуществляется автоматически при отсутствии ее на последующей позиции. Отсутствие тары на первой (приемной ) позиции верхнего яруса или наличие тары на последней позиции (позиции выдачи) нижнего яруса фиксируется систе- мой автоматического управления, которая вырабатывает очередность подачи транспортной тележки 8 к тому или иному технологическому модулю 5..
У каждого приемно-накопительного устройства 7 установлены подпружиненные упоры 27, предотвращающие, отклонения транспортной тележки 8 от вертикали при загрузке ее тарой. На эстакаде 10 установлен привод 28 гибкого тягового органа 11 и устройство 29 натяжения.
Гибкий автоматизированный комплекс работает следующим образом.
При поступлении сигнала от приемно- накопительного устройства 7 любого технологического модуля 5 система автоматического управления задает программу поиска требуемой пустой тары и подачи ее на позицию загрузки приемно-накопительного устройства заданного технологического модуля или программу загрузки транспортной тележки 8 груженой тарой (тарой с готовыми изделиями), поиск заданного места складирования и установку ее в ячейку склада.
Возможно объединение обеих программ.
Штабелер 2 осуществляет поиск заданной системой автоматического управления ячейки склада 1, забирает тару 21 и устанавливает ее на верхний ярус поворотной платформы 13 транспортной тележки 8. Включается привод 28 и гибкий тяговый орган 11 перемещает тележку 8 по направляющим 9 и заданному технологическому модулю 5.
В зависимости от расположения заданного технологического модуля 5 по одну или другую сторону трассы транспортной тележки 8 включается соответствующий привод 16 поворота платформы 13. При этом электромагнит 17 опускает ролик 18, на него наезжает транспортная тележка 8 пазом 15 механизма 14 поворота, выполненного по типу мальтийского креста, и платформа 13 поворачивается на 90° в сторону заданного технологического модуля 5.
При подходе тележки 8 к приемно-на- копительному устройству 7 заданного технологического модуля 5 срабатывает устройство точного останова(не показано)и тележка останавливается. Срабатывают силовые цилиндры 20 и 25. При этом пустая тара перегружается на верхний ярус 19 приемно-накопительного устройства, а груженая тара - на нижний ярус платформы 13 транспортной тележки 8.
Привод 28 включается на реверс и транспортная тележка 8 возвращается в исходное положение на склад 1. По пути она тем же пазом 15 механизма 14 поворота наезжает на тот же опущенный ролик 18 привода 16 поворота и платформа 13 поворачивается в исходное положение.
Отрабатывая заданную программу, штабелер 2 снимает груженую тару с нижнего яруса тележки 8 и устанавливает ее в заданную ячейку склада 1.
После заполнения тары, находящейся на позиции загрузки приемно-накопи- тельного устройства 7 готовыми изделиями, включается привод вращения роликоопор 24 рольганга нижнего яруса 23 и загруженная тара перемещается на соседнюю позицию в сторону позиции выдачи. Одновременно перемещается на соседнюю позицию и остальная находящаяся на нижнем ярусе 23 загруженная изделиями тара. Так происходит накопление груженой тары на нижнем ярусе 23 прием- но-накопительного устройства 7. Тара находящаяся на позиции предыдущей позиции выдачи, занимает освободившуюся после перегрузки на тележку 8 груженой тары позицию выдачи и посылает в систему автоматического управления сигнал о вызове транспортной тележки
Одновременно срабатывает устройство 26 перегрузки тары 21 и перемещает по- следнюю с верхнего яруса на позицию загрузки нижнего яруса. После возврата устройства перегрузки 26 в исходное положение включается привод вращения роликоопор 22 рольганга верхнего яруса 19 и вся пустая тара 21. находящаяся на нем. перемещается на соседнюю позицию Так происходит накопление пустой тары на верхнем ярусе 19 При перемещении тары заполняется позиция перегрузки и осво- бождается первая (приемная) позиция верхнего яруса 19 приемно-нэколительно- го устройства 7.
Освободившаяся приемная позиция посылает в систему автоматического управ- ления сигнал о вызове транспортной тележки, и цикл повторяется.
1}
, , N
При заполнении всех свободных ячеек склада 1 или при профилактическом ремонте штабелера 2 технологические модули 5 не останавливаются, а продолжают работу, используя в качестве пустой тары тару, накопленную на верхнем ярусе приемно-на- копительных устройств 7. и направляя груженую тару на накопители 3 и 4 резерва склада. Для этого на накопителях 3 и 4 установлены силовые цилиндры (не показаны), аналогичные силовым цилиндрам 20 приема пустой тары, установленным на верхнем ярусе 19 приемно-накопительных устройств 7.
При перегрузке груженой тары с тележки 8 на накопитель 3 платформа 13 поворачивается также, как и при перегрузке на штабелер 2, а при перегрузке тары на накопитель 4 поворот платформы не требуется. Поэтому привод 16 поворота отключается
Формула изобретения
1 Гибкий автоматизированный комплекс, содержащий автоматизированный склад со штабелером, приводную транспортную тележку под тару с изделиями, технологические модули включающие технологическое оборудование и приемно-на- копительные устройства, отличающий- с я тем, что. с целью повышения производительности работы транспортная тележка снабжена двухъярусной поворотной платформой для размещения тары с изделиями причем на трассе передвижения тележки жестко установлен привод поворота упомянутой платформы, при этом каждое из приемно-накопительных устройств выполнено двухъярусным, ярусы которого сооветству- ют ярусам поворотной платформы
МЛ
ФигЗ
Фиг.4
| Транспортно-накопительная система | 1984 |
|
SU1199588A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
