Изобретение относится к машиностроению, в частности к рабочим органам промышленных роботов, и может быть использовано при автоматизации сборочных процессов в различных отраслях промышленности.
Цель изобретения - повышение надежности работы захвата за счет ослабления магнитного поля перед отрывом детали.
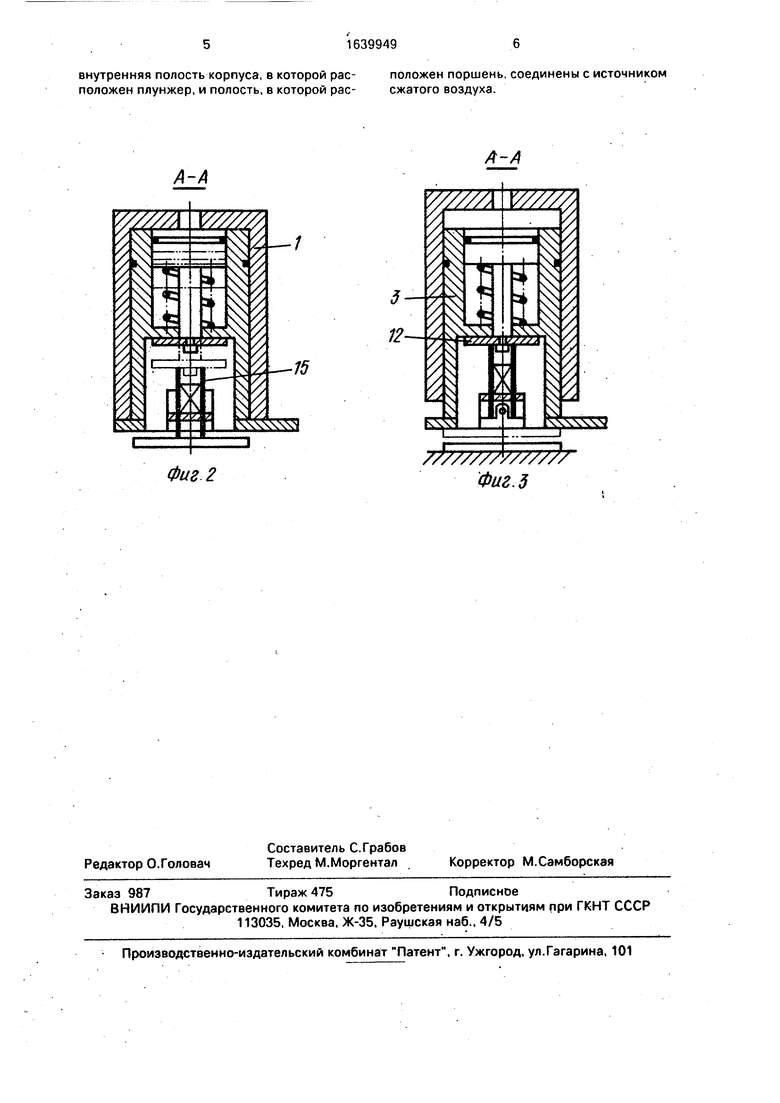
На фиг. 1 изображен магнитный захват, общий вид; на фиг. 2 - разрез А-А на фиг. 1, момент захвата и переноса детали; на фиг. 3 - то же, момент отрыва детали.
Захват содержит корпус 1, внутреняя полость которого соединена с источником сжатого воздуха (не показан) через входное отверстие 2. В полости корпуса установлен плунжер 3 из диамагнитного материала, имеющий внутреннюю верхнюю 4 и нижнюю 5 полости, в плунжере выполнен поперечный сквозной паз 6 с нижней стороны. Плунжер смонтирован на опоре 7, жестко соединенной с рукой манипулятора (не показана), опора связана с корпусом посредством равнорасположенных по окружности пружин 8 растяжения.
В верхней полости 4 размещен поршень 9, подпружиненный относительно плунжера пружиной 10 сжатия, шток 11 поршня 9 выходит в нижнюю полость 5 и на нем установлена ферромагнитная шунтирующая пластина 12. В пазу 6 размещена державка 13, закрепленная на корпусе, на державке смонтирован постоянный магнит 14 и соединенные с ним в блок пластинчатые магнито- проводы 15, с Помощью которых происходит захват детали 16.
Расчет пружины 10 ведут на величину магнитного поля при замыкании его Через деталь 16 и пластину 12.
Захват работает следующим образом.
В исходном (перед закреплением детали) положении в полости корпуса 1 отсутствует давление, корпус прижат к плунжеру 3, магнитопроводы 15 выступают за опору 17, пластина 12 притянута к магнитопроводам. В таком положении захват опускается на деталь 16. Магнитное поле при этом замыкается через деталь 16 и пластину 12, сила притяжения пластины 12 к магнитопроводам ослабевает, и пружиной 10 пластина 12 отрывается от магнитопроводов. Деталь 16 оказывается закрепленной и переносится манипулятором на позицию разгрузки,
Отделение детали 16 от захвата может происходит как при укладке ее на основание, так и на весу. В первом случае деталь необходимо опустить на поверхность, например, стола и, продолжая движение руки
манипулятора вниз, довести опору 7 до упора в деталь 16. При этом корпус 1 перемещается вверх на величину выступания магнитопроводов 15. Затем через отверстие
2 в полость корпуса подается сжатый воздух. Поршень 9, имеющий меньшее, чем корпус 1, сопротивление движению, начинает перемещаться вниз, пока пластина 12 не коснется магнитопроводов 15 и не замкнет их, шунтируя магнитный поток. После этого под действием возрастающего давления начинает перемещаться относительно плунжера 3 корпус 1 и вместе с ним магнитный блок, в результате чего происходит отрыв детали 16 от захвата.
Для открепления детали на весу давление в полость корпуса 1 подается сразу же. Далее процесс происходит аналогично описанному.
После отрыва детали воздух из полости
корпуса 1 стравливается, и корпус под действием пружин 8 возвращается в исходное положение. Пластина 12 остается притянутой к магнитопроводам 15, так как на нее
воздействует полное магнитное поле. Пружина 10 возвращает поршень 9 в исходное положение в, тот момент, когда начинается новый цикл работы захвата.
За счет того, что при подаче давления
магнитный поток сначала шунтируется, удерживающее усилие на момент отрыва детали удается уменьшить минимум в 2 раза, соответственно уменьшаются нагрузка на деталь и вероятность ее изгиба при отрыве. Одновременно обеспечивается надежный контакт с деталью выступающими магнитопроводами при захвате.
40
Формула изобретения
Магнитный захват, содержащий установленный на руке манипулятора корпус, на котор ом закреплен постоянный магнит с магнитопроводами, подвижный элемент с
5 закрепленной на нем шунтирующей пластиной, имеющей возможность взаимодействия с магнитопроводами, отличающий- с я тем, что, с целью повышения надежности, корпус подпружинен относительно ру0 ки манипулятора, а во внутренней полости корпуса установлен плунжер из диамагнитного материала, при этом подвижный элемент выполнен в виде установленного вб внутренней полости плунжера поршня со
5 штоком, причем плунжер жестко закреплен на руке манипулятора, поршень подпружинен относительно плунжера, кроме того, со стороны одного из торцов плунжера выполнена полость, в которой расположен упомянутый постоянный магнит с магнитопроводами, а
внутренняя полость корпуса, в которой расположен плунжер, и полость, в которой расположен поршень, соединены с источником сжатого воздуха.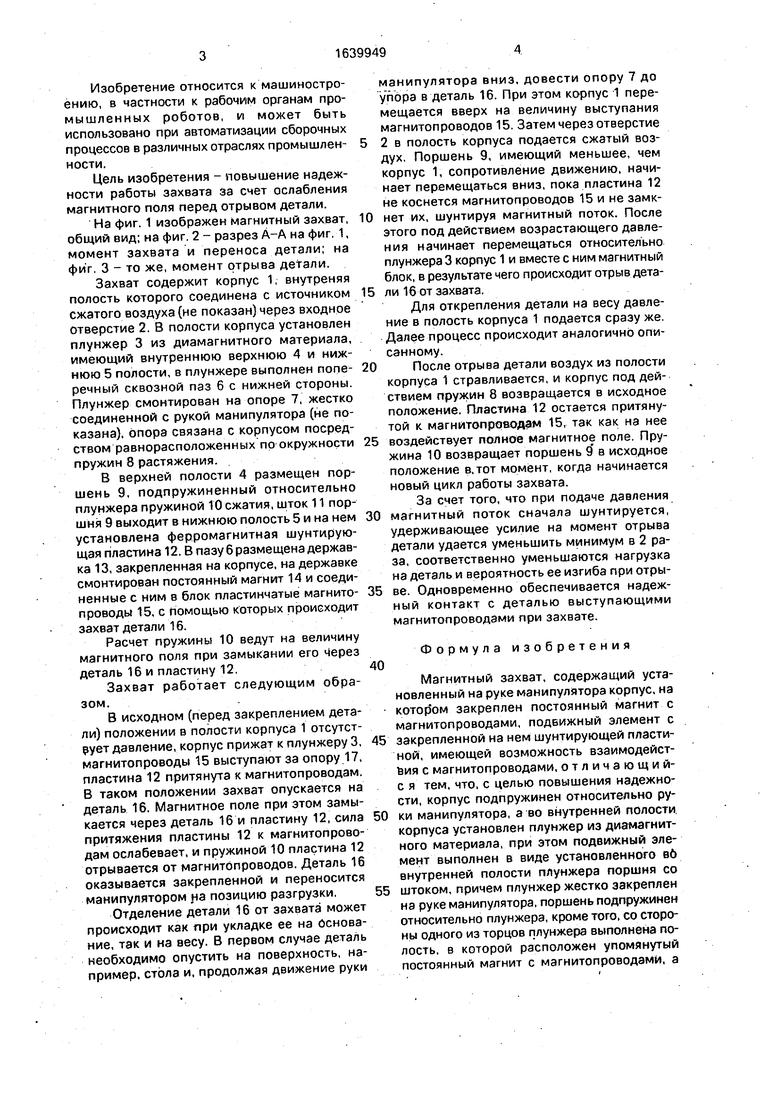
| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительная захватная головка манипулятора | 1987 |
|
SU1393634A1 |
| Магнитный захват | 1979 |
|
SU844269A1 |
| Магнитный схват | 1986 |
|
SU1430283A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Захватное устройство | 1988 |
|
SU1620299A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Сенсорный клапан Овандера В.Б. | 1989 |
|
SU1721364A1 |
| Схват манипулятора | 1983 |
|
SU1093549A1 |
| Манипулятор для захвата ферромагнитных деталей с ферромагнитных поверхностей | 1976 |
|
SU649566A1 |
| Кузнечный манипулятор | 1985 |
|
SU1263420A1 |
Изобретение относится к машиностроению, в частности к магнитным захватным устройствам. Целью изобретения является повышение надежности в работе за счет ослабления магнитного поля в момент отрыва детали от захвата. Для этого в корпусе 1 образована полость, в которой установлен плунжер 3. во внутренней полости 4 которого размещен подпружиненный поршень 9 со штоком 11. На последнем закреплена шунтирующая пластина 12. На корпусе 1 с помощью державки 13 закреплен постоянный магнит 14 с магнитопроводами 15. Плунжер 3 жестко закреплен с помощью опоры 7 на руке манипулятора, а корпус 1 подпружинен относительно опоры 7. Полость 4 плунжера и внутренняя полость корпуса 1 сообщены с источником сжатого воздуха. Во время отрыва детали 1Б от мэгнитопроводов 15 сжатый воздух подается во внутреннюю полость корпуса и полость 4. Поршень 9 перемещается вниз, пластина 12 шунтирует магнитопроводы 15, ослабевая силу притяжения детали 16 к магнитопроводам 15. Затем поднимается корпус 1 и деталь 16 сбрасывается опорой с магнитопроводов 15 3 ил. Ё Os CJ ч о 4 О 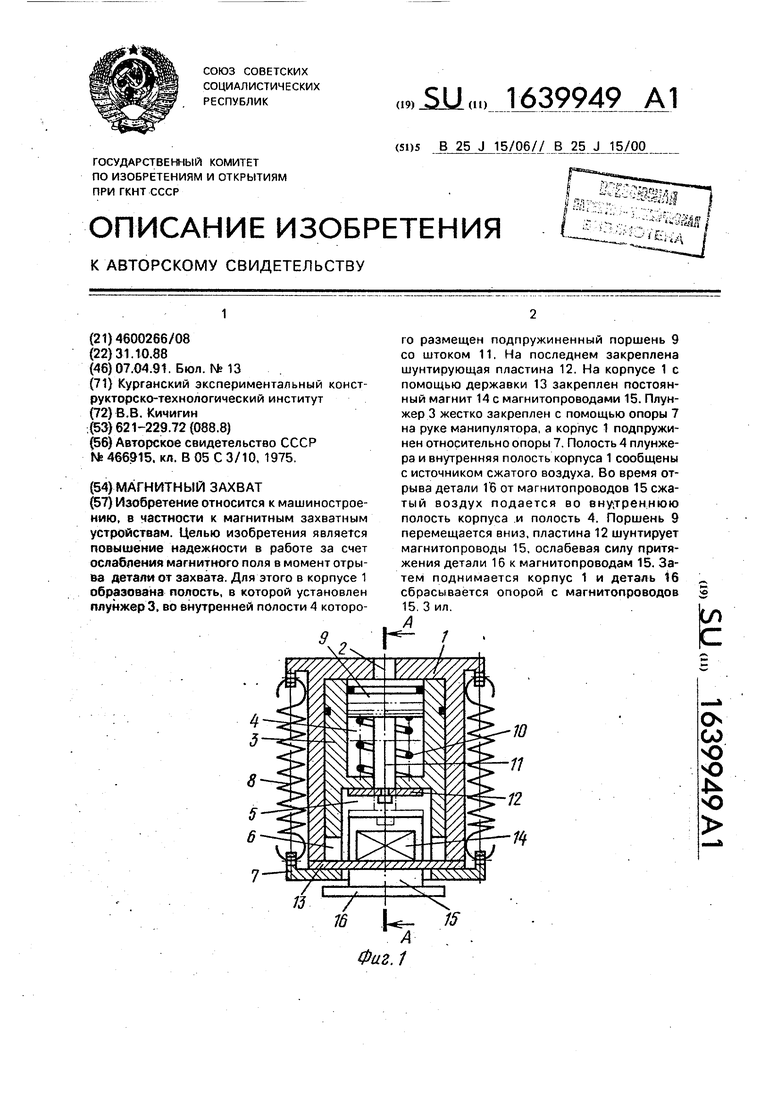
А-А
Фиг 2
А-А
/S///////////J/ Фиг.З
| Подвеска для деталей,окрашиваемых способом электроосаждения | 1973 |
|
SU466915A1 |
| кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
