Изобретение относится к горному оборудованию, в частности к рабочим органам шахтным погрузочных машин, и может быть применено в горнодобывающей, химической, строительной и других отраслях промышленности.
Цель изобретения - расширение эксплуатационных возможностей.
На фиг. 1 показан рабочий орган погрузочной машины, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - гидравлическая схема совпадения штоковых полостей силовых цилиндров привода рычагов.
Рабочий орган установлен на конвейере 1 погрузочной машины и содержит стрелы 2 и 3 с гидроцилиндрами 4 и 5 их подъема, рукояти 6 и 7 с силовыми цилиндрами 8 и 9 их поворота и гребки 10 и 11 с силовыми цилиндрами 12 и 13. На каждой из стрел посредством горизонтальных шарниров 14, и 15 одними концами закреплены рычаги 16 и 17, другие концы которых соединены между собой горизонтальной осью 18. Каждый из рычагов соединен с соответствующей стрелой силовыми цилиндрами 19 и 20. Штоковые полости этих цилиндров соединены между собой.
Силовые цилиндры 4 и 5 служат для подъема и опускания рабочего органа в рабочее или транспортное положение, а также для прижатия их вниз при внедрении гребков в горную массу.
Рычаги 16 и 17, ось 18 и цилиндры 19 и 20 служат для увеличения жесткости рабочего органа к воздействию поперечных сил. Эти элементы вместе со стрелами рабочего органа и конвейером машины образуют жесткую в горизонтальной и подвижную в вертикальной плоскости конструкцию. Возникающая при боковом нагребании поперечная сила распределяется на обе стрелы, что позволяет увеличить рабочие нагрузки и расширяет эксплуатационные возможности рабочего органа.
Кроме того, за счет сообщения штоковых полостей силовых цилиндров 19 и 20 привода рычагов 16 и 17 обеспечивается поочередная взаимоувязанная работа обеих частей рабочего органа.
Гидравлическая схема соединения штоковых полостей силовых цилиндров привода рычагов (фиг. 3) включает силовые цилиндры 19 и 20, распределитель 21 управления рабочим ходом цилиндров, распределитель 22 компенсации утечек рабочей жидкости в штоковых полостях цилиндров 19 и 20 и предохранительный клапан 23. Штоковые полости цилиндров соединены между собой линией 24. Управление цилиндрами 19 и 20 осуществляется включением
распределителя 21 в позицию 1 или 3. Для компенсации утечек или устранения излишков масла в штоковых полостях этих цилиндров распределитель 22 включается в
позицию 2 и одновременно с ним распределитель 21 - в позицию 1 или 3. При этом поршни цилиндров займут крайние положения: один максимально выдвинут, другой задвинут.
0 Рабочий орган работает следующим образом.
В исходном положении (фиг. 1 и 2) гребок 11 опущен на почву выработки и выполняет операцию нагревания в поперечном
5 направлении, а гребок 10 поднят над горной массой и выдвигается вперед в продольном направлении. Для обеспечения синхронного движения гребков в противоположном направлении штоковые полости цилиндров
0 12 и 13 сообщены между собой.
После достижения гребками конечных положений рабочая жидкость подается в поршневую полость цилиндра 20. За счет соединения между собой штоковых поло5 стей цилиндров 19 и 20 рычаги 16 и 17 поворачиваются навстречу друг другу относительно горизонтальной оси 18, в результате чего сначала стрела 2 опускается до упора гребка 10 в горную массу, а затем стрела 3
0 поднимается вверх. Соответственно рычаги 16и 17также поменяются местами: рычаг 17 окажется вверху, а рычаг 16 - внизу. Затем рабочая жидкость подается в поршневую полость цилиндра 12 и гребком 10 выполня5 ется нагребание горной массы на конвейер, а гребок 11 выдвигается в исходное положение. В конечных положениях гребков рабочая жидкость подается в поршневую полость цилиндра 19, стрела 3 опускается, а
0 затем стрела 2 поднимается. После включения гидроцилиндра 13 гребка 11 рабочий орган занимает исходное положение (фиг. 1 и 2).
Взаимоувязка работы цилиндров 4 и 5
5 подъема рабочего органа и цилиндров 19 и 20 поворота рычагов решается или установкой в гидролиниях цилиндров 4 и 5 предохранительных клапанов, или установкой поршней цилиндров 4 и 5 в плавающее
0 положение. Помимо этих двух способов, возможен и третий, когда цилиндры 4 и 5 стрел включаются на постоянное прижатие вниз. Причем давление в цилиндрах 4 и 5 не может быть высоким, так как в противном
5 случае при упоре гребков в почву произойдет отрыв носка конвейера от почвы выработки. Такое давление легко преодолевается с помощью других цилиндров, настроенных на более высокое давление, т.е. цилиндров 19 и 20.
Формула изобретения
1. Рабочий орган погрузочной машины, включающий две стрелы с рукоятями и гребками и силовые цилиндры привода стрел, рукоятей и гребков, отличающийся тем, что, с целью расширения эксплуатационных возможностей, рабочий орган снабжен двумя рычагами, подвижно соединенными между собой посредством горизонтальной оси и силовыми цилиндрами привода рычагов, при этом каждый рычаг шарнир- но закреплен на стреле, а силовой цилиндр его привода соединяет рычаг со стрелой.
2. Рабочий орган поп. 1, о т л и ч а ю- щ и и с я тем, что штоковые полости силовых цилиндров привода рычагов соединены между собой.
6
X
ФигЗ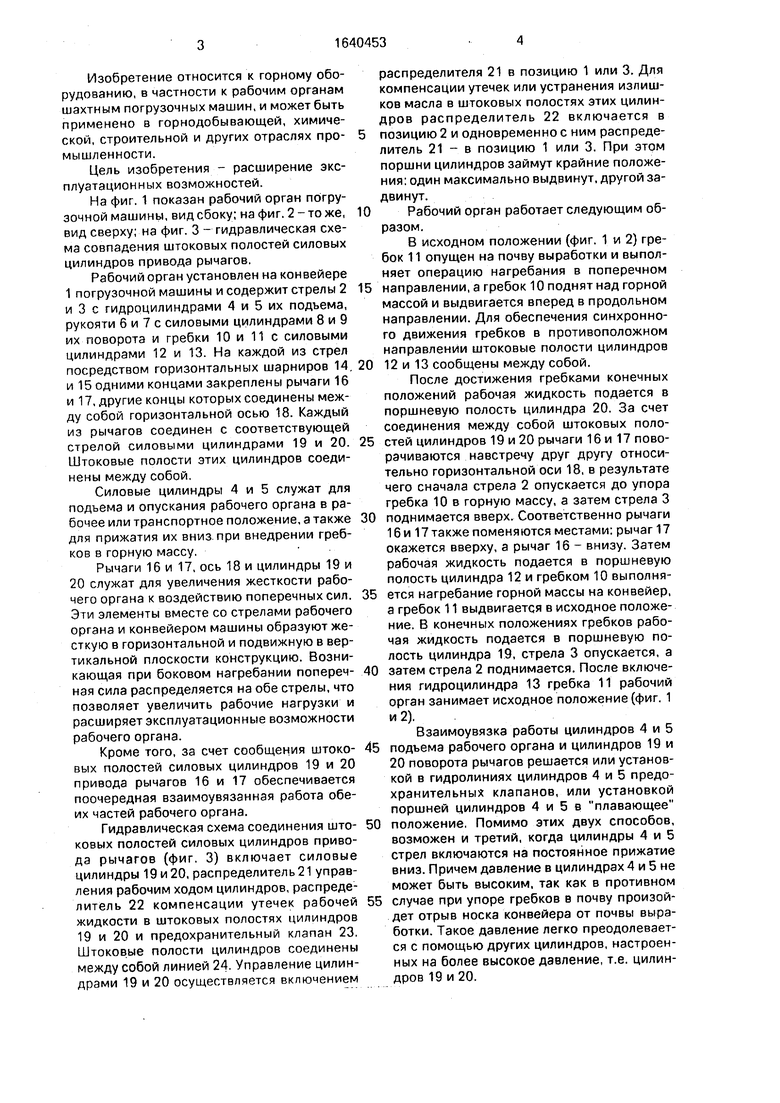
| название | год | авторы | номер документа |
|---|---|---|---|
| Рабочий орган погрузочной машины | 1985 |
|
SU1314126A1 |
| Рабочий орган погрузочной машины | 1990 |
|
SU1795122A1 |
| Погрузочная машина | 1983 |
|
SU1155779A1 |
| Погрузочная машина | 1984 |
|
SU1155781A1 |
| Рабочий орган погрузочной машины /его варианты/ | 1984 |
|
SU1218146A1 |
| Рабочий орган погрузочной машины | 1989 |
|
SU1666765A1 |
| Погрузочная машина | 1982 |
|
SU1067226A1 |
| Гребковая погрузочная машина | 1988 |
|
SU1583638A1 |
| Погрузочная машина | 1985 |
|
SU1308773A1 |
| Многогребковый погрузочный орган | 1990 |
|
SU1721268A1 |

Изобретение относится к горному оборудованию, в частности к рабочим органам шахтных погрузочных машин, и может быть применено в горнодобывающей, химической, строительной и других отраслях промышленности. Цель изобретения - расширение эксплуатационных возможностей. Для этого на конвейере 1 погрузочной машины устанавливают рабочий орган, содержащий стрелы 2 и 3 с гидроцилиндрами их подъема 4 и 5, рукоятки 6 и 7 с цилиндрами 8 и 9 их поворота и гребки 10 и 11 с цилиндрами 12 и 13. На каждой из стрел в горизонтальных шарнирах 14 и 15 одними концами закреплены рычаги 16 и 17, другие концы которых соединены между собой горизонтальной осью 18 Рычаги соединены с соответствующими стрелами силовыми цилиндрами 19 и 20, штоковые полости которых сообщены между собой. Для обеспечения синхронного движения гребков в противоположных направлениях штоковые полости цилиндров 12 и 13 также сообщены между собой. Гребок 11 опущен на почву выработки и нагребает горную массу в поперечном направлении, а гребок 10 поднят над горной массой и выдвигается вперед в продольном направлении. По достижении гребками конечных положений рабочая жидкость подается в поршневую полость цилиндра 20. За счет сообщения штоковых полостей цилиндров 19 и 20 рычаги 16 и 17 поворачиваются навстречу друг другу относительно горизонтальной оси 18, в результате чего сначала стрела 2 опускается, а затем стрела 3 поднимается. Соответственно и рычаг 17 оказывается вверху, а рычаг 16 - внизу Рабочая жидкость затем подается в поршневую полость цилиндра 12 и операция нагребания повторяется. 1 з.п. ф-лы, 3 ил. JlP-л со с о 4 О 4 сл СлЭ 
| Патент США № 3907093, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Рабочий орган погрузочной машины | 1985 |
|
SU1314126A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
