(54) МЕХАНИЗМ ШАГОВОГО ПЕРЕМЕЩЕНИЯ
координатного стола, а простое объели- цение его с предметным стопом, установленным на каретке и имеющим привод вертикального возвратно-поступательного перемещения, выполненный, например, в виде приводного от электромагнита клина, привело бы к увеличению габаритов и веса конструкции за счет установки дополнительного привода, а также к усложнению схемы управления.
Цепью изобретения является расширение технологических возможностей меканизма за счет сообщения каретке вертикального возвратно-поступательного движения от привода горизонтального перемещения каретки.-;,
Поставленная цель достигается тем, что каретка снабжена шарнирно закрепленными на ней подпружиненными держателями, контактирующими с направляющими каретки, а цилиндрические, направляюшйе установлены под углом к направлени горизонтального перемещения карет1си, причем электромагнитный зажим вьгаолне регулируемым по высоте.
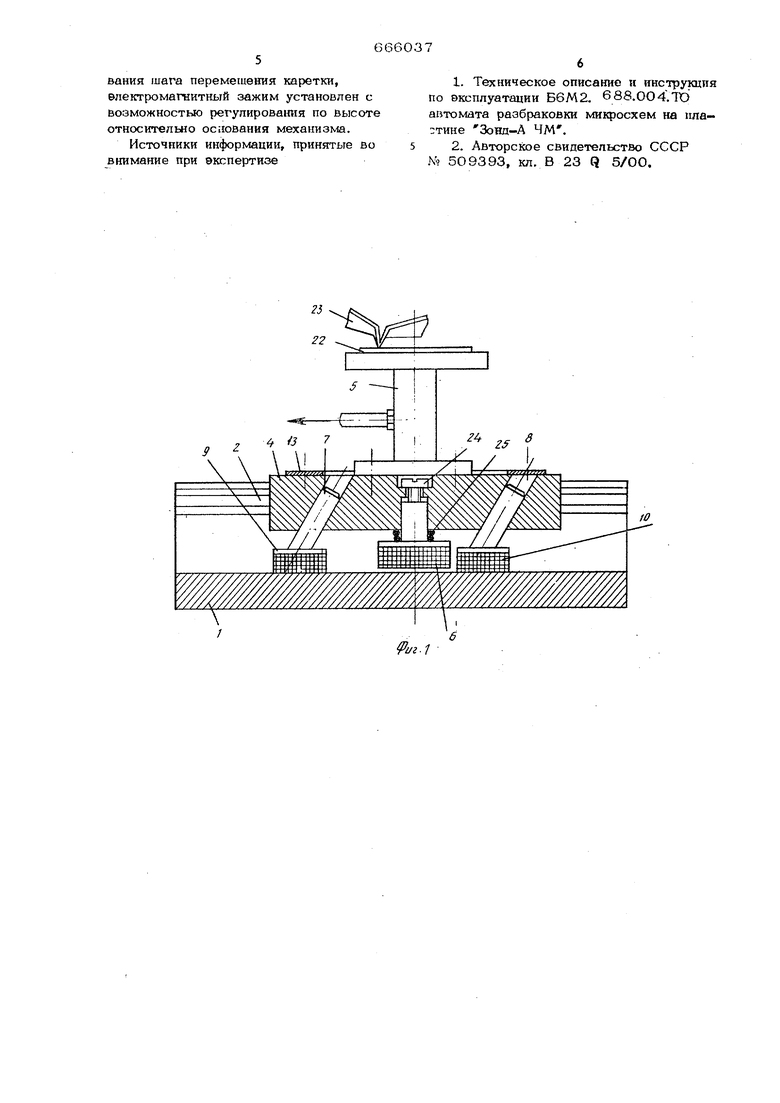
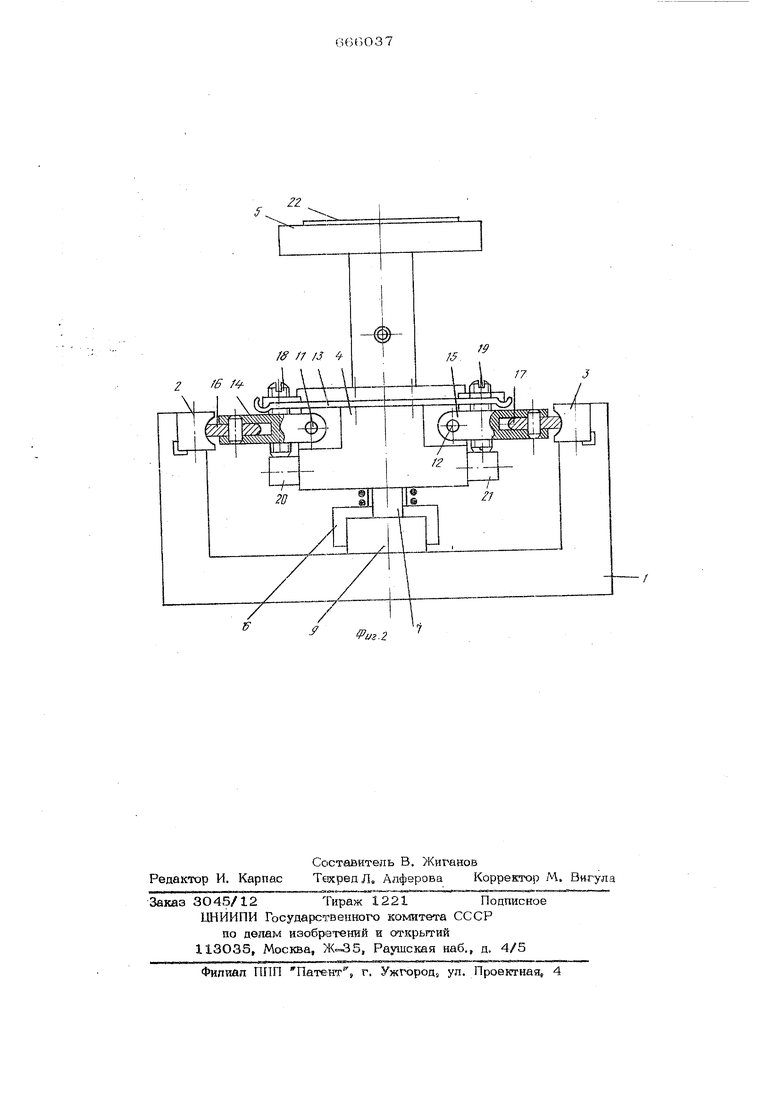
На фиг. 1 изображен механизм в раз. резе, на фиг. 2 -механизм, вид сбоку.
Механизм щагового перемещения содержит основание 1, направляющие 2 и 3 с вогнутыми цилиндрическими рабочими поверхностями, каретку 4, предметный стол 5, магнитный зажим 6, цилиндрические направляющие 7 и 8 с жестко закрепленными на них электромагнитами fe и 10.
Цилиндрические направляющие 7 и 8 установлены под углом к направлению гфизонтального перемещения каретки 4. На каретке 4 при помощи осей 11, 12 щарнирно установлены подпружиненные пружиной 13 держатели 14, 15 с роликами 16, 17, контактирующими с рабочими поверхностями направляющих 2, 3. В держателях 14,15 установлены винты 18, 19, тантактирукнцие с уи орами 20,21, жестко закрепленными на каретке 4.
Механизм шагового й емещения работает следующим образом. В исходном положении электромагниты 9, 1О, 8лект ромагаитный зажим 6 каретки 4 отключены, и каретка удерживается в крайнем попоженин силой упругости пружины 13, воздействующей своими рабочими концами ва держатели 14, 15. При етом винты 18,19 контактируют с упорами 2О, 21, обрабатываемая деталь 22 контактирует с кнструмеитом 23, а между
электромагнитным зажимом 6 п основанием 1 имеется зазор.
При включении электромагнитов 9, 10 цилиндрические направляющие 7, 8 фиксируются относительно основания. Затем включается электромагнитный зажим 6, и каретка 4 перемещается по цилиндрическим направляющим 7,8 вниз и влев (см. фиг. 1). При этом держатели 14, 15 повооачиваются вокруг осей 11, 12 пружина 13 деформируется, а между винтами 18,19 и упорами 2О, 21 образуется зазор. Так как рабочие поверхности направляющих 2,3 вьгаолнены в виде вогнутых цилиндрических поверхностей, то контакт между ними и роликами 16, 17 держателей 14,15 во время перемещения каретки 4 вниз не нарущается. После этого отключаются электромагниты 9,10, электромагнитный зажим 6, и каретка 4 под действием пружины 13 поднимается в крайнее верхнее положение. При этом винты 18, 19 упираются В упоры 20, 21 а инструмент соприкасается с деталью 22. Цикл повторяется.
Величина горизонтального и вертикального перемещений каретки определяется величиной зазора между электромагнитным зажимом 6 и основанием 1 и углом наклона цилиндрических направляющих 7, 8 по отношению к основанию 1. Величина зазору между электромагнитным зажимом 6 и основанием 1 регулируется при помощи винта 24 и пружины 25.
Формула изобретения
1.Механизм шагового перемещения, содержащий каретку/с электромагнитным зажимом и предметным столом, перемещающуюся в направляющих от привода горизонтального перемещения, выполненного в виде установленных в каретке цилиндрических направляющих, взаимодействующих с электромагнитами, отличающийся тем, что, с целью расширения технологических возможностей механизма за счет сообщения каретке вертикального возвратно-поступательного перемещения от привода горизонтального перемещения, йарегка снабжена щарнирно закрепленными на ней подпружиненными держателями, взаимодейстующими с направляющими каретки, а цилинд рические направляющие уст(ановлены под Ялом к направлению горизонтального перемещения каретки,
2.Механизм по п. 1, о т л и ч а ю- щ и и с я тем, что, с целью регулирования шага перемещения каретки, электромагнитный зажим установлен с возможностью регупироватш по высоте относительно основания механизма.
Источники информации, принятые во внимание при экспертизе
1.Техническое описание и инструкция по эксплуатации Б6М2. 688.004ЛО автомата разбраковки микросхем на чла:;тине Зонд-А ЧМ.
2.Авторское свидетельство СССР № 5О9393, кл, В 23 q 5/00.
| название | год | авторы | номер документа |
|---|---|---|---|
| Полуавтоматическая линия для сборки,преимущественно,петель | 1983 |
|
SU1088912A1 |
| Автомат для обработки электромонтажных проводов | 1977 |
|
SU936784A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ И ЗАЖИМА ТРУБ | 1992 |
|
RU2043803C1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Двухкоординатный стол | 1979 |
|
SU781008A1 |
| Устройство для маркирования листового материала | 1982 |
|
SU1159679A1 |
| Устройство для укладки бутылок в тару в горизонтальном положении | 1983 |
|
SU1121189A1 |
| Способ изготовления обрезиненного кордного полотна и устройство для его осуществления | 1977 |
|
SU736866A3 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| Устройство для вырубки изделийиз РЕзиНы | 1977 |
|
SU806456A2 |
иг.1
