Изобретение относится к робототехнике и может быть использовано в машиностроении и других отраслях для захвата и манипулирования деталями.
Цель изобретения - расширение технологических возможностей захватного устройства за счет манипулирования объектом в устройстве и захвата обьектов группами пальцев.
На фиг. 1 показано устройство, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - конструкция захватного пальца.
Захватное устройство состоит из цилиндрического корпуса 1, на котором в радиальных пазах расположено пять захватных пальцев, в центре корпуса, вдоль вертикальной оси, находится палец-толкатель 3. Палец 2 выполнен в виде крестообразной направляющей 4, имеющей
сквозное цилиндрическое центральное отверстие, в котором размещен цилиндрический ползун 5 с возможностью осевого перемещения. На боковых стенках направляющей 4 имеются две бобышки с глухими отверстиями, в которых неподвижно посажены цапфы 6. Вдоль вертикальной оси направляющей 4 имеется паз, в котором расположена зубчатая рейка 7, закрепленная на боковой стенке ползуна 5. Через зубчатое колесо 8 и рейку 7 ползун 5 связан с электроприводом 9, закрепленным на боковой стенке (на бобышке) направляющей 4. Ползун 5 имеет центральное осевое отверстие, через которое проходит валик 10, соединенный с электроприводом 11, который закреплен на нижнем торце ползуна 5. На верхнем торце ползуна свободно посажена сменная захватная губка 12, которая заOs
О
креплена на валике 10 и имеет возможность поворота. На одной из цапф 6 закреплено зубчатое колесо 13, которое связано с электроприводом 14, закрепленным в корпусе 1. Палец 2 сидит в гнездах корпуса 1 на сво- бодных концах цапф 6. Гнезда располагаются в корпусе так, что пальцы располагаются равномерно по периметру корпуса 1.
Затватное устройство работает следующим образом.
Каждый из пяти захватных пальцев имеет возможность поворота вокруг оси цапф за счет электропривода 14, выдвижения ползуна 5 за счет электропривода 9 и вращения сменной захватной за счет электропривода 11. Дополнительный палец имеет электроприводы 9 и 11 и может выдвигаться вдоль оси корпуса и иметь вращение сменной захватной губки. Захватное устройство может работать в трех режимах: переориентация объекта в зоне сборки за счет смены поверхностей захвата, т.е. наложение на деталь различных пальцев, досылание объекта на сборке с помощью пальца толкателя и придание детали вращательно- го движения вращением сменных захватных губок 12; захват двух деталей за счет большего выдвижения ползунов группы пальцев (работа на двух уровнях), а также предварительная их сборка в захватном ус-
тройстве за счет движения одной из групп пальцев (например, сборка вала и втулки). Алгоритмы работы всех семнадцати электроприводов разрабатываются заранее и применяется контроль по силе тока на электроприводах.
Формула изобретения Универсальное захватное устройство, содержащее корпус, захватные пальцы и привод их перемещения, отличающее- с я тем, что, с целью расширения технологических возможностей, захватный палец снабжен смонтированной на корпусе крестообразной направляющей с приводом, ползуном с рейкой и приводом его перемещения, а также привод перемещения губки, причем в крестообразной направляющей выполнена сквозная проточка и параллельная ей прорезь, при этом в продольной сквозной проточке с возможностью перемещения расположен ползун и в прорези направляющей расположено конечное звено привода перемещения ползуна, имеющее возможность взаимодействовать с рейкой, кроме этого, в ползуне выполнено сквозное отверстие, в котором расположен дополнительно введенный валик, на одном конце которого смонтирована сменная губка, а другой конец жестко связан .с приводом, закрепленным на ползуне.

| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захватное устройство | 1990 |
|
SU1771955A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Схват робота | 1990 |
|
SU1773716A1 |
| Захватное устройство | 1985 |
|
SU1305029A1 |
| Адаптивное электромеханическое захватное устройство для промышленных и коллаборативных роботов | 2024 |
|
RU2836085C1 |
| Устройство для сборки резьбовых соединений | 1985 |
|
SU1328138A1 |
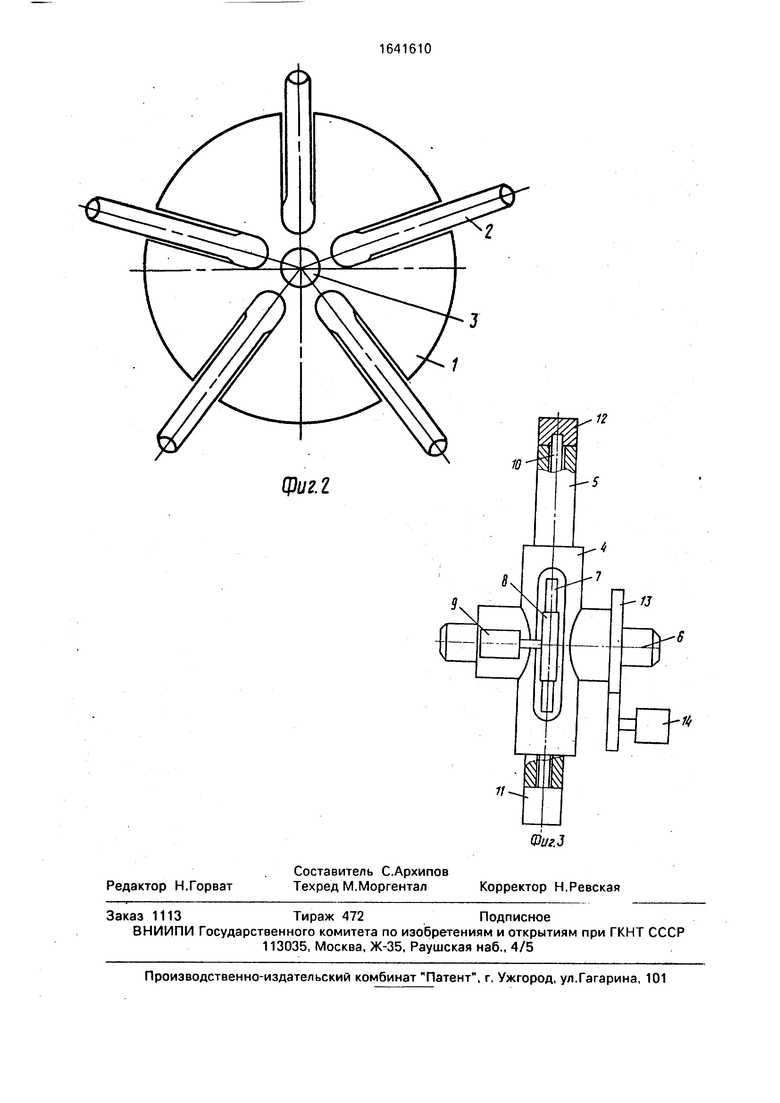
Изобретение относится к робототехнике и может быть использовано для захвата и манипулирования деталями. Цель изобретения - расширение технологических возможностей захватного устройства. Захватное устройство содержит цилиндрический корпус, на котором в радиальных пазах расположено пять пальцев, а в центре корпуса расположен палец-толкатель. Каждый из пяти пальцев содержит крестообразную направляющую 4, смонтированную в радиальном пазу и кинематически связанную с электроприводом 14, в направляющей выполнено сквозное отверстие, в котором располагается ползун 5, кинематически связанный с приводом 9. Ползун 5 также имеет сквозное осевое отверстие, в котором расположен валик 10, на одном его конце смонтирована губка 12, а другой конец связан с электроприводом 11 Губка 12 может вращаться благодаря электроприводу 11, ползун перемещается вдоль оси от электропривода 9, а весь палец имеет возможность поворота (качения) от электропривода 14. Центральный палец имеет два электропривода 9 и 11. 3 ил сл с
гЬ
Фиг.1
/
12
| Попов Е.П | |||
| Робототехника и гибкие производственные системы | |||
| М.: Наука, 1987, с | |||
| Деревянный торцевой шкив | 1922 |
|
SU70A1 |
| Ротационный колун | 1919 |
|
SU227A1 |
