Фиг. Z
Изобретение относится к металлургическому оборудованию, а именно к устройствам для пакетирования чушек, для равномерного размещения в пакете которых нужен четырехпозиционный поворот вокруг верти- чальной оси на угол, равный 90°(п-1), где п - порядковый номер ряда в пакете.
Цель изобретения - расширение функциональных возможностей путем обеспечения четырех фиксированных положений рабочего органа.
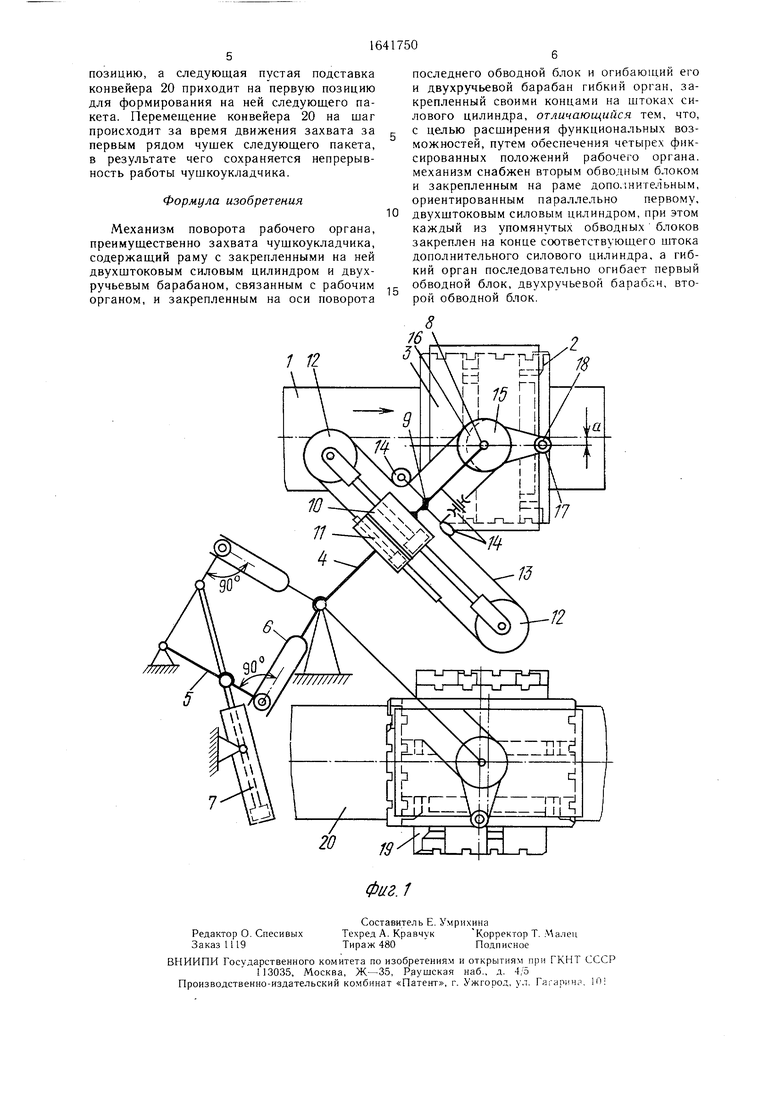
На фиг. 1 схематично изображен чушко- укладчик, вид сверху; на фиг. 2 - в изомет- рии кинематическая схема механизма поворота рабочего органа.
Механизм использован в чушкоуклад- чике, который содержит механизм 1 для формирования ряда чушек 2, стойку, наверху которой расположен механизм перемещения захвата 3 ряда чушек 2, выполненный, например, в виде поворотного рычага 4. Для привода плавного поворота его предусмотрен, например, кривошипно-кулисный механизм. В крайних положениях механизма ось ,фивошипа 5 составляет прямой угол с осью 6, жестко связанной с рычагом 4. Для привода кривошипа 5 предусмотрен, например, пневмоцилиндр 7. На консольном конце рычага 4 расположен механизм подъема-опускания захвата 3, выполненный, например, в виде вертикально расположенного пневмоцилиндра (не показан), на конце штока которого поворотно вокруг вертикальной оси 8 закреплен захват 3 ряда чушек 2. Захват 3 закреплен на механизме 9 поворота, выполненном в виде двух двухштоковых силовых цилиндров 10 и 11, у которых на концах штока другого цилиндра 10 распо10
При использовании чушкоукладчика для формирования пакетов, не имеющих смеще ния рядов от оси пакета, захват закрепляют соответственно без смещения.
На позиции укладки пакета в чушкоук ладчике установлен конвейер 20, который в разливочных машинах является одновре менно технологическим конвейером-накопи телем дискретной подачи. Для формирова ния на конвейере используют его, например первую позицию, а последующие позиции используют для осмотра пакетов, обвязки взвешивания и для задела готовых пакетов
Чушкоукладчик работает следующим образом.
После окончания формирования ряда 2 по сигналу с устройства 1 включаются в работу механизмы по укладке ряда 2 с меха низма 1 в пакет 19. Механизм подъема опускания опускает захват 3, который за хватывает сформированный ряд чушек и 20 поднимается. После этого включается меха низм перемещения захвата и перемещает захват 3 с чушками над конвейером 20.
Механизм подъема-опускания опускает захват 3 с чушками на конвейер 20, если это первый ряд, либо на предыдущие ранее уложенные ряды. Далее захват 3 разжи мается, поднимается без чушек, и возвра щается в исходное положение, где механиз мы ожидают сигнала для следующего вклю чения.
15
30
Механизм поворота 9 захвата 3 работает в процессе перемещения захвата 3 с чушка ми из исходного положения к позиции уклад ки следующим образом: укладка первого пятого, девятого и т. д. рядов выполняется
ложены обводные блоки 12, а на концах 35 без включения механизма поворота, штока другого цилиндра 11 закреплены концы отрезка гибкого органа (каната) 13. Канат 13 огибает обводные блоки 12, направляющие блоки 14 и двухручьевой барабан 15. Середина каната 13 закреплена в промежутке 16 между ручьями. Двухручьевой бара- 40 бан 15 кинематически связан с захватом 3 жестко от проворачивания и свободно от перемещения в вертикальном направлении. Выполнено это, например, в виде направт. е
захват 3 сохраняет свое первоначальное положение относительно рычага 4; укладка второго, шестого, десятого и т. д. рядов вы полняется с поворотом в плане против часо вой стрелки на 90°, для чего включаются оба цилиндра 10 и 11; укладка третьего седьмого и т. д. рядов выполняется с пово ротом в плане против часовой стрелки на 180°, для чего включается один цилиндр 10 укладка четвертого, восьмого и т. д. рядов
ляющей 17, принадлежащей двухжелобко - 45 должна выполняться с поворотом на 270
вому блоку, и штанги 8, принадлежащей захвату 3. Величина хода каждого пневмоцилиндра 10 и 11 равна четверти развернутой длины окружности каната 13 на двух- ручьевом барабане 15, т. е. ход цилиндра 10
в плане против часовой стрелки. Однако в целях сокращения углового пути захват поворачивается из исходного положения в плане по часовой стрелке на (-90°), для чего включается один цилиндр 11, что дает
преобразуется в поворот барабана 15 на 50 тот же результат за меньшее время.
180° и ход цилиндра 11 - в поворот на 90°.
При использовании этого чушкоукладчика для формирования из чушек пакетов захват закрепляют со смещением а от оси поворота в механизмах 9 поворота, равным половине размера величины наклона боковой поверхности чушки, т. е. величине смещения рядов чушек в пакете 19 от его оси.
55
При движении захвата 3 от позиции ук ладки в исходное положение соответствую щие цилиндры 10 и 11 восстанавливают сво им обратным ходом захват 3 из повернутого в исходное положение.
После укладки в пакет последнего ряда в конце подъема пустого захвата от закон ченного пакета включается конвейер 20 и перемещает пакет на шаг на следующую
При использовании чушкоукладчика для формирования пакетов, не имеющих смещения рядов от оси пакета, захват закрепляют соответственно без смещения.
На позиции укладки пакета в чушкоук- ладчике установлен конвейер 20, который в разливочных машинах является одновременно технологическим конвейером-накопителем дискретной подачи. Для формирования на конвейере используют его, например, первую позицию, а последующие позиции используют для осмотра пакетов, обвязки, взвешивания и для задела готовых пакетов.
Чушкоукладчик работает следующим образом.
После окончания формирования ряда 2 по сигналу с устройства 1 включаются в работу механизмы по укладке ряда 2 с механизма 1 в пакет 19. Механизм подъема - опускания опускает захват 3, который захватывает сформированный ряд чушек и 0 поднимается. После этого включается механизм перемещения захвата и перемещает захват 3 с чушками над конвейером 20.
Механизм подъема-опускания опускает захват 3 с чушками на конвейер 20, если это первый ряд, либо на предыдущие ранее уложенные ряды. Далее захват 3 разжимается, поднимается без чушек, и возвращается в исходное положение, где механизмы ожидают сигнала для следующего включения.
Механизм поворота 9 захвата 3 работает в процессе перемещения захвата 3 с чушками из исходного положения к позиции укладки следующим образом: укладка первого, пятого, девятого и т. д. рядов выполняется
без включения механизма поворота,
без включения механизма поворота,
т. е.
захват 3 сохраняет свое первоначальное положение относительно рычага 4; укладка второго, шестого, десятого и т. д. рядов выполняется с поворотом в плане против часовой стрелки на 90°, для чего включаются оба цилиндра 10 и 11; укладка третьего, седьмого и т. д. рядов выполняется с поворотом в плане против часовой стрелки на 180°, для чего включается один цилиндр 10; укладка четвертого, восьмого и т. д. рядов
должна выполняться с поворотом на 270
должна выполняться с поворотом на 270
в плане против часовой стрелки. Однако в целях сокращения углового пути захват поворачивается из исходного положения в плане по часовой стрелке на (-90°), для чего включается один цилиндр 11, что дает
тот же результат за меньшее время.
5
При движении захвата 3 от позиции укладки в исходное положение соответствующие цилиндры 10 и 11 восстанавливают своим обратным ходом захват 3 из повернутого в исходное положение.
После укладки в пакет последнего ряда в конце подъема пустого захвата от законченного пакета включается конвейер 20 и перемещает пакет на шаг на следующую
позицию, а следующая пустая подставка конвейера 20 приходит на первую позицию для формирования на ней следующего пакета. Перемещение конвейера 20 на шаг происходит за время движения захвата за первым рядом чушек следующего пакета, в результате чего сохраняется непрерывность работы чушкоукладчика.
Формула изобретения
Механизм поворота рабочего органа, преимущественно захвата чушкоукладчика, содержащий раму с закрепленными на ней двухштоковым силовым цилиндром и двух- ручьевым барабаном, связанным с рабочим органом, и закрепленным на оси поворота
,-
последнего обводной блок и огибающий его и двухручьевой барабан гибкий орган, закрепленный своими концами на штоках силового цилиндра, отличающийся тем, что, с целью расширения функциональных возможностей, путем обеспечения четырех фиксированных положений рабочего органа, механизм снабжен вторым обводным блоком и закрепленным на раме дополнительным, ориентированным параллельно первому, двухштоковым силовым цилиндром, при этом каждый из упомянутых обводных блоков закреплен на конце соответствующего штока дополнительного силового цилиндра, а гибкий орган последовательно огибает первый обводной блок, двухручьевой барабан, второй обводной блок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУШКОУКЛАДЧИК | 1972 |
|
SU430942A1 |
| ЧУШКОУКЛАДЧИК | 1972 |
|
SU422521A1 |
| Устройство для укладки в пакет металлических чушек | 1979 |
|
SU863495A1 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU611835A2 |
| Устройство для укладки в пакет металлических чушек | 1972 |
|
SU521202A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ В ПАКЕТ МЕТАЛЛИЧЕСКИХ ЧУШЕК | 2005 |
|
RU2284957C1 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU612874A2 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ЧУШЕК МЕТАЛЛА В ПАКЕТ | 1990 |
|
RU2025426C1 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU611834A2 |
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
Изобретение относится к металлургическому оборудованию, а именно к устройствам для пакетирования чушек, для равномерного размещения в пакете которых нужен четырехпозиционный поворот вокруг вертикальной оси на угол, равный 90° (п- 1), где п - порядковый номер ряда в пакете. Цель изобретения - расширение функциональных возможностей путем обеспечения четырех фиксированных положений рабочего органа. Для этого задание положения захвата обеспечивается путем поворота связанного с захватом двухручьевого барабана 15 посредством перетягивания гибкого органа 13 двумя двухштоковыми силовыми цилиндрами 10 и 11 при их попеременном включении. 2 ил.
Л-I-
| МЕХАНИЗМ ПОВОРОТА КОЛОННЫ ТРАКТОРНОГО ПОГРУЗЧИКА | 0 |
|
SU399450A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
