о ю
4 О
ON
Изобретение относится к оборудованию для испытания колесных транспортных Средств и может быть использовано при исследовании управляемости и устойчивости колесного транспортного средства.
Цель изобретения - расширение функциональных возможностей.
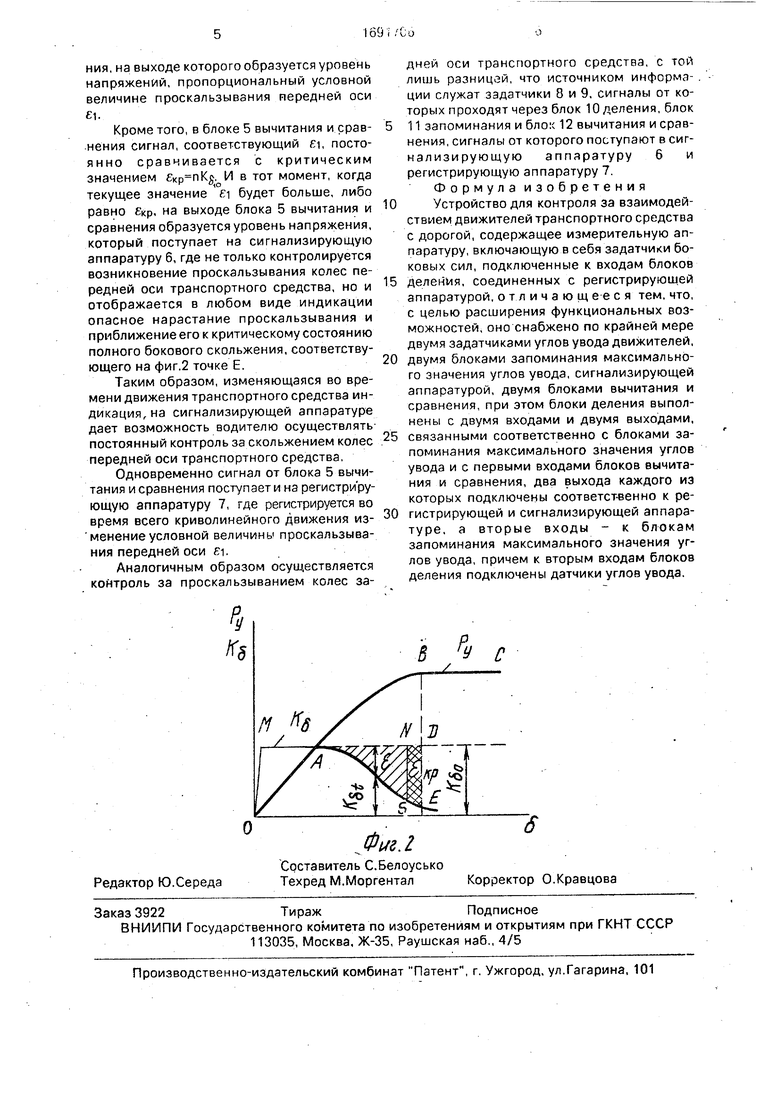
На фиг. 1 представлена блок-схема уст- эойства для контроля взаимодействия колес транспортного средства с дорожным покрытием; на фиг.2 - кривые зависимостей боковой силы Ру от угла увода д и коэффициента сопротивления уводу К$ от угла уво- да д.
Устройство содержит первый задзтчик fl боковой силы, установленный на переднем колесе (или оси) транспортного средства, первый задатчик 2 угла увода, установленный на передней оси транспортного средства, причем выход первого задатчика 1 боковой силы и первый задатчик 2- угла увода соединены с первым блоком 3 деления. Первый выход блока 3 деления со- Ьдинен с первым блоком А запоминания на- чального значения коэффициента (сопротивления уводу К§опередней оси. Вы- од блока 4 запоминания и второй выход рлока 3 деления подключены к первому бло- су 5 вычитания и сравнения, первый выход второго соединен с сигнализирующей аппаратурой 6, а второй выход - с регистрирующей аппаратурой 7, На задней оси Транспортного средства установлены второй задатчик 8 боковой силы и второй задзтчик 9 угла увода. Выход второго задатчика 8 .боковой силы и второй задатчик 9 угле увода соединены с вторым блоком 10 деления. Первый выход блока 10 деления подключен к второму блоку 11 запоминания начального значения коэффициента сопротивления уводу задней оси, Выход блока 11 запоминания и второй выход блока 10 деления соединены с вторым блоком 12 вычитания и сравнения, первый выход которого подключен к сигнализирующей аппаратуре 6, а второй - к регистрирующей аппаратуре 7. Все блоки и приборы обеспечиваются питанием от источника постоянного тока (не показано).
Устройство работает следующим образом.
Сигналы, пропорциональные боковой силе, действующей на переднюю ось транспортного средства от задатчика 1 боковой силы,и сигналы, пропорциональные углу увода передней оси транспортного средства, от задатчика 2 угла увода поступают на вход блока 3 деления, на выходе которого образуется уровень напряжения, соответствующий величине коэффициента сопротивления уводу передней оси Кд, определяемой выражением
,(1)
где Pyi - боковая сила, действующая на колеса передней оси; 5i - угол увода колес передней оси транспортного средства.
По этому выражению коэффициент сопротивления уводу передней оси dt опреде- ляется в любой текущий момент движения транспортного средства.
На фиг.2 область NDES является зоной критического проскальзывания колес, а величина 8 Кр - величиной критического про- скальзывания колес
,(2)
где п - коэффициент, определяющий ширину зоны критического проскальзывания колес, т.е. интервал времени, после которого возникает занос ();
Kgo- коэффициент сопротивления боковому уводу.
Полученный в начале движения в блоке
3деления уровень напряжений, соответст- вующий значению коэффициента сопротивления уводу передней оси в начальный момент движения « подается на вход блока
4запоминания, где это значение фиксируется.
Изменение текущего значения коэффициента сопротивления уводу передней оси Kj. определяется также с помощью блока 3 деления, на выходе которого образуется уровень напряжения, пропорциональный
текущему значению К Сигналы от блоков 3 и 4 поступают на вход блока 5 вычитания и сравнения, где производится умножение величин КЈюи п, сравнение уровней напряжений, соответствующих начал ьному и текущему значению коэффициента сопротивления уводу передней оси, а также сравнение .полученной разницы с На выходе блока 5 вычитания и сравнения образуется сигнал, пропорциональный начальному Кж текущему значению соответствующий условной величине проскальзывания передней оси Јi. В случае, когда значение « находится на участке МА (фиг.2), величины начального КЈ и текущего значения К +равны и,
следовательно, условная величина проскальзывания . При дальнейшем движении транспортного средства по криволинейной траектории происходит нарастание боковой силы РУ1 и уменьшение
текущего значения KSyt , что приводит к увеличению разности KЈ , т.е. условная величина проскальзывания Ј будет больше нуля (фиг.2). Это состояние и фиксируется блоком 5 вычитания и сравнеФм.1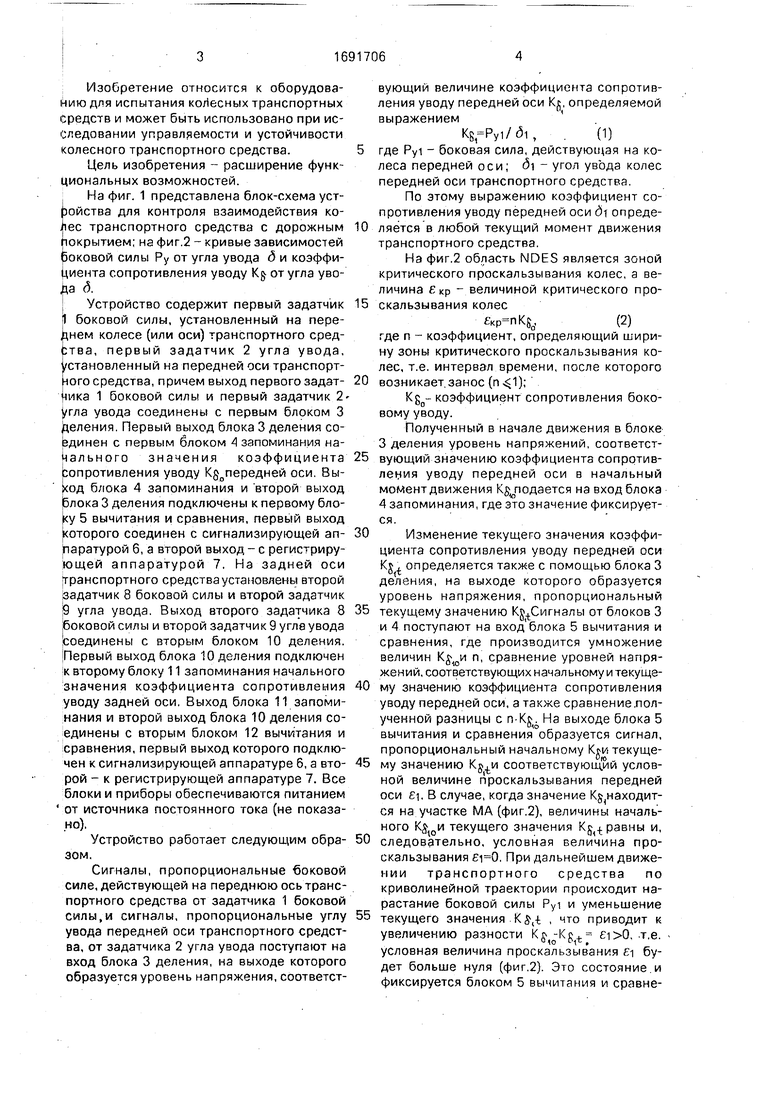
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров движителей транспортного средства | 1989 |
|
SU1735733A1 |
| Устройство для исследования управляемости и устойчивости движения транспортного средства | 1988 |
|
SU1643980A1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Устройство для исследования управляемости и устойчивости движения транспортного средства | 1989 |
|
SU1711016A1 |
| Способ управления торможением транспортного средства и устройство для его осуществления | 2022 |
|
RU2819157C1 |
| Устройство для контроля устойчивости транспортного средства при торможении | 1984 |
|
SU1290129A1 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Устройство для контроля устойчивости транспортного средства при торможении | 1984 |
|
SU1270610A1 |
| Система дистанционного телеметрического измерения коэффициента сопротивления уводу шин опорных катков гусеничных машин | 2019 |
|
RU2713688C1 |
Изобретение относится к оборудованию для испытания транспортных средств и может быть использовано при исследовании управляемости и устойчивости движения транспортного средства. Цель изобретения - расширение функциональных возможностей, Устройство содержит задатчики 1 и 8 боковых сил и задатчики 2 и 9 углов увода движителей, связанные соответственно с блоками 3 и 10 деления, выходы которых подключены к блокам 4 и 11 запоминания максимального значения углов увода и к блокам 5 и 12 вычитания и сравнения, выходы которых связаны с сигнализирующей б и измерительной 7 аппаратурой Изменяю-, щаяся во время движения транспортного средства индикация на сигнализирующей аппаратуре б дает возможность водителю осуществлять постоянный контроль за скольжением колес транспортного средства. 2 ил. (Л С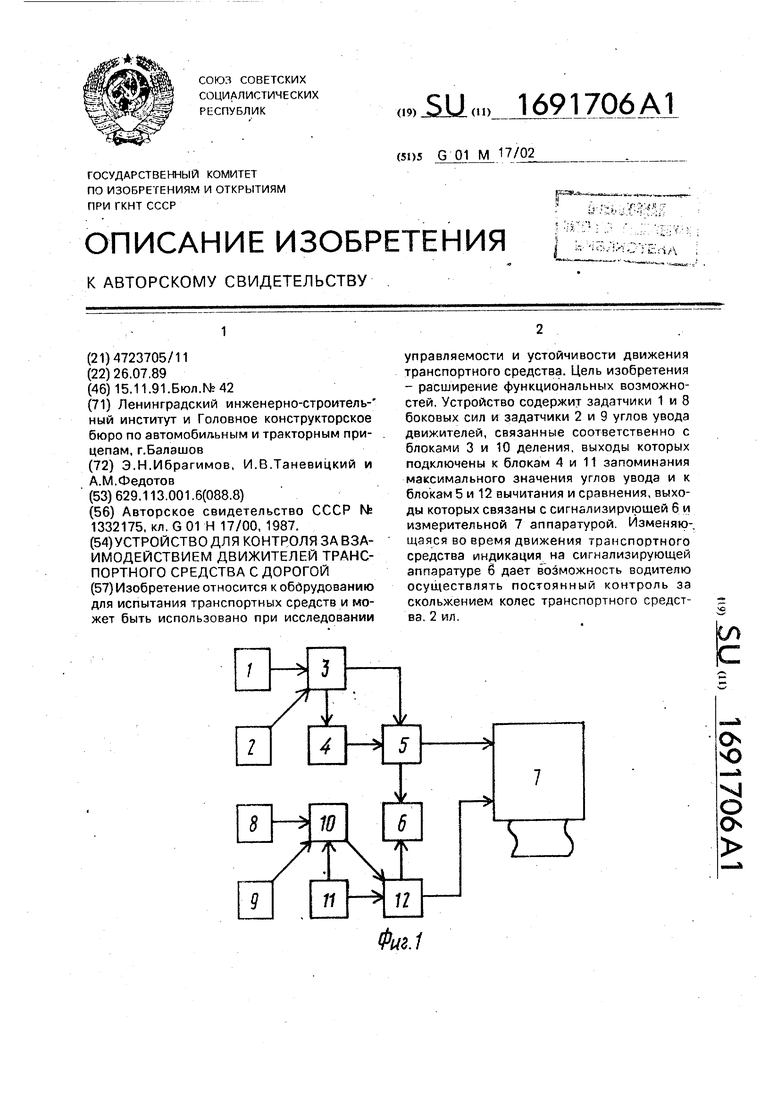
| Способ испытания движителей и устройство для его осуществления | 1985 |
|
SU1332175A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
