Изобретение относится к гидротехнике, в частности к речным гидротехническим сооружениям и водному транспорту.
Цель изобретения - улучшение эксплуатационных характеристик гидропривода путем повышения точности синхронизации перемещения створок ворот при действии на них случайных знакопеременных нагрузок.
На чертеже изображены блок-схема устройства для автоматического управления и синхронизации перемещения створок ворот шлюза.
Способ автоматического управления и синхронизации перемещения створок ворот шлюза включает подачу жидкости в напорные полости гидроприводов створок ворот с одновременным вытеснением рабочей жидкости из сливных полостей этих гид- роприводов, определение положения створок ворот, формирования текущих значений информационных сигналов, определяемых рассогласованием положений створок ворот для каждой створки, и соответствующих знаку фазы этих сигналов с последующим выделением сигнала положительной полярности, задание требуемого значения информационных сигналов, суммирование требуемых и текущих значений информационного сигнала для каждой створки, ворот и в зависимости от величины суммарного сигнала корректировку расхода в магистрали, связанной со сливной полостью гидропривода соответствующей створки ворот до момента равенства нулю значения текущего информационною сигнала.
Устройство для автоматического управления и синхронизации перемещения створок ворот шлюза содержит левую 1 и правую 2 створки ворот шлюза. Левая створка 1 механически связана со штоком гидропривода 3, а правая створка 2 - со штоком гидропривода 4 При этом напорные полости гидроприводов 3 и 4 сообщены
с напорными патрубками главных насосов 5 и 6 питания, причем левый насос 5 установлен на валу главного электродвигателя 7, а правый насос 6 - на валу главного электродвигателя 8. На левой створке 1 жестко укреплен сельсин-датчик 9, а на правой створке 2 - сельсин-датчик 10. Кроме того, к сливным полостям гидроприводов 3 и 4 подключены вспомогательные насосы 11 и 12
соответственно, механически связанные со вспомогательными электродвигателями 13 и 14. При этом к магистралям, соединяющим вспомогательные насосы 11 и 12 со сливными полостями гидроприводов 3 и 4 соответственно, подключены дроссели 15 и 16, сообщающие полости со сливными баками.
Вспомогательный электродвигатель 13 включен в электросеть через тиристорную
станцию 17 управления, а электродвигатель 14 - через тиристорную станцию 18 управления. К входу тиристорной станции 17 подключен своим выходом сумматор 19, а ко входу станции 18 - сумматор 20 соответственно, К входу сумматора 19 подключен усилитель-ограничитель 21 сигнала своим выходом, а ко входу сумматора 20 - усилитель-ограничитель 22 сигнала. Усилители- ограничители 21 и 22 выполнены на
операционном усилителе с отсекающим транзистором или диодом в цепи обратной связи. При этом фазочувствительные блоки 23 и 24 своими выходами подсоединены к соответствующим входам усилителей-ограничителей 21 и 22 сигналов, а выходами - к сельсинам-датчикам 9 и 10.1 Другие входы сумматоров 19 и 20 подсоединены к выходу программного задатчика 25, к выходам которого подключены также электродвигатели
7 и 8.
Устройство для автоматического управления и синхронизации перемещения сгво- рок ворот шлюза работает следующим образом.
При открытии ворот включаются по программе главные электродвигатели 7 и 8 основных насосов 5 и 6 питания и вспомогательные электродвигатели 13 и 14 вспомогательных насосов 11 и 12. Масло под давлением поступает в напорные полости гидроприводов 3 и 4. Из сливных полостей при этом масло через калиброванные дроссели 15 и 16 поступает на слив в сливной бак. На калиброванных дросселях 15 и 16 происходит суммирование потоков жидкости, поступающих от вспомогательных насосов 11 и 12 и вытекающих из сливных полостей гидроприводов 3 и 4 соответственно. Учитывая разные геометрические размеры полостей, дроссель выбирают из расчета обеспечения прохождения расхода, равного по величине расходу, подаваемому в на- порные полости, а избыток расхода (регулируемый) поступает от вспомогательных насосов 11 и 12, приводимых вспомогательными электродвигателями 13 и 14, которые обеспечивают синхронизацию движения створок ворот шлюза. При таком спо- собе регулирования, если будет действовать на створки попутная волна (или, что то же самое.-направление внешней силы будет совпадать с направлением движения створок), то созданный подпор в сливных полостях не дает возможности увеличиваться скорости левой 1 и правой 2 створок.
Несинхронность движения створок 1 и 2 компенсируется посредством управления вспомогательными электродвигателями 13 и 14 вспомогательных насосов 11 и 12.
Синхронизация движения левой 1 и правой 2 створок обеспечивается по следующей схеме. Сельсин-датчик 9 соединен с левой створкой 1, а сельсин-датчик 10 - с правой створкой 2. Сигналы с левого 9 и правого 10 сельсинов-датчиков поступают на вход фазочувствительного блока (например, блока 24), который выдает сигнал рассогласования (опережения или отставания) одной створки по отношению к другой. Если при движении опережает правая створка 2, то на выходе фазочувствительного блока 24 появляется сигнал положительной полярности, а на выходе фазочувствительного блока 23 - отрицательной полярности. Эти сигналы поступают на входы усилителей-ограничителей 22 и 21 соответственно, которые пропускают сигналы положительной полярности и отсекают (ограничивают прохождение) сигналы от отрицательной полярности. Таким образом, на выходе усилителя-ограничителя 22 появляется сигнал положительной полярности, который складывается алгебраически с сигналом (положительным)
задатчика 25 на сумматоре 20. В этом случае суммарный сигнал на его выходе больше по величине по сравнению с тем сигналом, который имеет место на выходе сумматора 5 при синхронном движении створок. Увеличение сигнала на выходе сумматора 20 вызывает соответствующее изменение в сигналах управления тиристорной станции 18 управления, которые приводят к больше- 10 му открытию тиристоров тиристорной станции и увеличению напряжения на электродвигателе 14, увеличению производительности вспомогательного насоса 12 и уменьшению расхода, поступающего из
15 сливной полости гидропривода 4, а следовательно, к уменьшению скорости правой створки 2. При этом регулирование скорости противоположной левой створки 1 по цепи синхронизации отсутствует (сигнал от20 рицательной полярности от фазочувствительного блока 23 ограничивается усилителем-ограничителем 21). Если при движении опережает левая створка 1, то процессы в гидроприводе протекают в об5 ратном порядке.
Синхронизация обеспечивается посредством управления вспомогательными электродвигателями 13 и 14 вспомогательных насосов 11 и 12 на всех этапах движения
0 створок. Главные электродвигатели 7 и 8 главных насосов 5 и 6 не регулируются. Если при движении створок произойдет изменение направления действия усилия нагрузки на створку (попутная волна), то созданное
5 противодавление в сливных полостях будет противодействовать усилию нагрузки и не приведет к увеличению скорости движения створок.
Формула изобретения
0 1. Способ автоматического управления и синхронизации перемещения створок ворот шлюза, включающий подачу жидкости в напорные полости гидроприводов створок ворот с одновременным вытеснением жид5 кости из сливных полостей этих гидроприводов, определение положения створок ворот, формирование текущих значений информационных сигналов, соответствующих рассогласованию положений створок ворот
0 для каждой створки с последующей корректировкой расхода сливаемой жидкости, о т- личающийся тем, что, с целью улучшения эксплуатационных характеристик гидропривода путем повышения точности
5 синхронизации перемещения створок ворот при действии на них случайных знакопе- ременных нагрузок, задают требуемое значение информационных сигналов, а текущие информационные сигналы формируют соответственно знаку фазы этих
сигналов с последующим выделением сигнала положительной полярности, суммируют требуемые и текущие значения информационного сигнала для каждой створки ворот и в зависимости от величины суммарного сигнала корректируют расход в магистрали, связанной с сливной полостью гидропривода соответствующей створки ворот, до момента равенства нулю значения текущего информационного сигнала.
2. Устройство для автоматического управления и синхронизации перемещения створок ворот шлюза, содержащее гидроприводы каждой створки ворот, напорные полости которых связаны с нагнетательны- ми патрубками соответствующих главных насосов питания, снабженных главными электродвигателями, сельсины-датчики, каждый из которых кинематически соединен с осью вращения соответственно левой и правой створок ворот, вспомогательные насосы питания, оснащенные вспомогательными электродвигателями, подключенными к выходам соответствующих сумматоров через тиристорные станции уп- равления, при этом первые входы сумматоров связаны соответственно с первым и
вторым выходами программного задатчика, третий и четвертый выходы которого соединены с фазными клеммами соответствующих главных электродвигателей, причем фазочувствительные блоки связаны с выходными обмотками своего и противоположного сельсинов-датчиков, отличающееся тем, что, с целью улучшения эксплуатационных характеристик гидропривода путем повышения точности синхронизации перемещения створок ворот при действии на них случайных знакопеременных нагрузок, оно снабжено усилителями-ограничителями сигналов, входы которых подключены к выходам соответствующих фазочувствительных блоков, а выходы - к вторым входам соответствующих сумматоров, и калиброванными дросселями, включенными в сливные магистрали, со- общенные со сливными полостями гидроприводов соответственно левой и правой створок ворот, при это нагнетательные патрубки вспомогательных насосов подключены к соответствующим сливным магистралям между сливными полостями гидроприводов и калиброванными дросселями.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической синхронизации приводов ворот шлюза | 1986 |
|
SU1404580A1 |
| Система управления гидроприводом двустворчатых ворот и затворов наполнения низконапорного шлюза | 1990 |
|
SU1767076A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| Устройство автоматической синхронизации движения створок ворот шлюза | 1986 |
|
SU1312136A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Электрогидравлическая система привода двухстворчатых ворот шлюза | 1986 |
|
SU1472565A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| Электрогидропривод двустворчатых ворот шлюза | 1987 |
|
SU1506015A1 |
| Устройство для управления двустворчатым затвором шлюза | 1984 |
|
SU1265706A1 |
| СПОСОБ КОНТРОЛЯ ПОЗИЦИОНИРОВАНИЯ СТВОРОК ДВУСТВОРЧАТЫХ ВОРОТ ШЛЮЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459033C1 |
Изобретение относится к гидротехнике, в частности к речным гидротехническим сооружениям и водному транспорту. Цель изобретения - улучшение эксплуатационных характеристик гидропривода путем перемещения створок ворот при действии на них случайных знакопеременных нагрузок. Способ автоматического управления и синхронизации перемещения створок ворот шлюза заключается в создании регулируемого противодавления в сливной полости гидропривода соответствующей створки ворот и регулировании расхода жидкости в сливной магистрали данного гидропривода. Синхронизация движения створок обеспечивается коррекцией сливаемого расхода: у опережающей створки дополнительный расход жидкости, подаваемой в сливную магистраль, увеличивается, и наоборот. Устройство для автоматического управления и синхронизации перемещения ворот шлюза Ё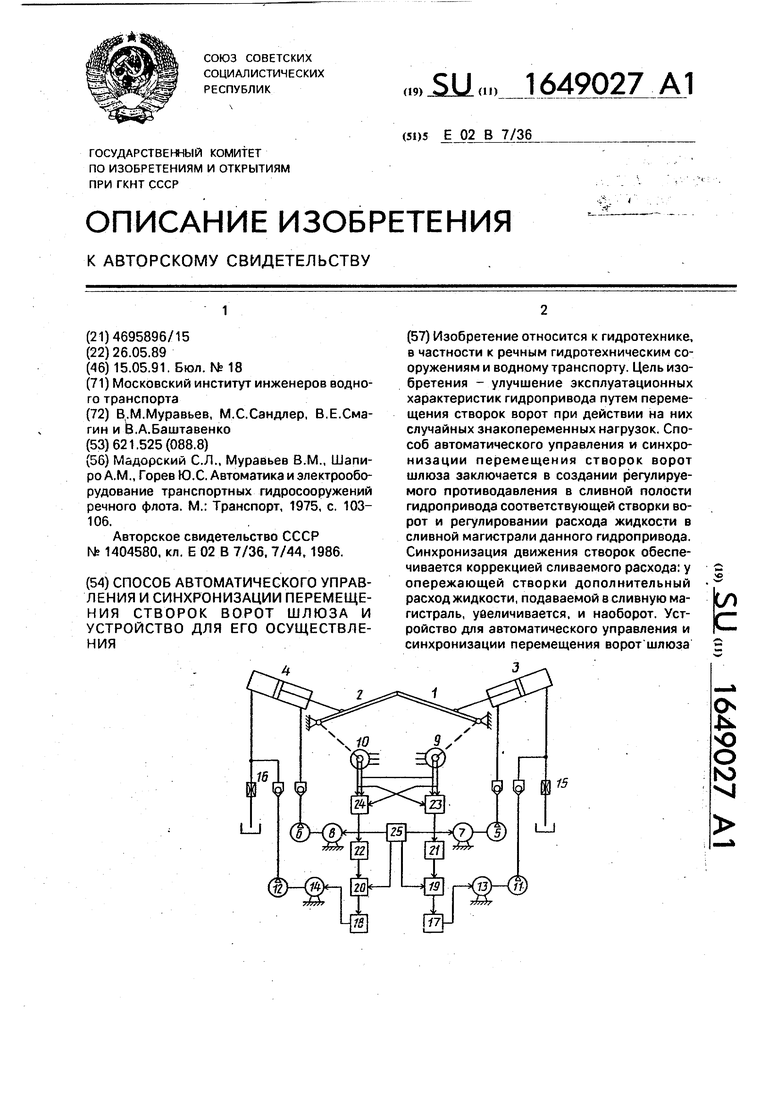
| Мадорский С.Л., Муравьев В.М., Шапиро A.M., Горев Ю.С | |||
| Автоматика и электрооборудование транспортных гидросооружений речного флота | |||
| М.: Транспорт, 1975, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| Устройство автоматической синхронизации приводов ворот шлюза | 1986 |
|
SU1404580A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
