(54) ЭКСКАВАТОР-ДРАГЛАЙН
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСКАВАТОР-ДРАГЛАЙНI 2LQEC111ШШ-'^ЮЗНАЯ^'^лНй^1ЕСКА1 | 1972 |
|
SU338595A1 |
| Устройство для определения загрузкиКОВшА дРАглАйНА | 1978 |
|
SU812886A1 |
| Способ автоматического управления процессом транспортировки ковша драглайна | 1970 |
|
SU627219A1 |
| Способ защиты драглайна от аварийных режимов при транспортировке ковша и устройство для его осуществления | 1978 |
|
SU744076A1 |
| Устройство для защиты стрелы экскаватора | 1989 |
|
SU1649106A2 |
| Устройство для управления электрическим приводом тяги драглайна | 1975 |
|
SU717228A1 |
| Устройство для защиты стрелы экскаватора | 1986 |
|
SU1416624A1 |
| Способ оптимального управления электроприводами драглайна | 1979 |
|
SU926163A1 |
| Устройство для определения расстояния ковша драглайна от вертикальной плоскости стрелы | 1977 |
|
SU657130A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА ОТКЛОНЕНИЯ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА | 1972 |
|
SU420741A1 |
1
Изобретение относится к области техники открытых горных работ, а именно к экскаваторам-драглайнам.
По основному авт. св. № 338595 известен экскаватор-драУлайн, который содержит два рычага, установленные соответственно на вершине у основания стрелы и связанные соответственно с подъемным и тяговым канатами, ось вращения первого из которых связана с валами первого сельсина и синусно-косинусного вращаюш.егося трансформатора, а ось вращения второго рычага связана с валом второго сельсина, причем однофазная обмотка первого сельсина и косинусная обмотка вращающегося трансформатора через первый и второй выпрямитель включены на вход суммирующего усилителя с диодом в цепи его обратной связи, выход которого подключен ко входу преобразователя, питающего двигатель тяговой лебедки.
В этом экскаваторе-драглайне обеспечивается защита от преждевременной саморазгрузки ковша, однако не обеспечивается его защита от недопустимых нагрузок в рабочем оборудовании, возникающих в процессе транспортировки ковша при приближении ковща к стреле.
Цель изобретения - защита экскаваторадраглайна от недопустимых нагрузок в рабочем оборудовании в процессе транспортировки ковща.
Эта цель достигается тем, что экскаватордраглайн снабжен вторым синусно-косинусным вращающимся трансформатором, третьим выпрямителем, вторым суммирующим усилителем с диодом в цепи его обратной связи, и четырьмя времязаДающими RC-це(0 почками, включейными соответственно выходами выпрямителей и входами суммирующих усилителей, причем вал второго синусно-косинусного вращающегося трансформатора соединен, с осью вращения установленного у основания стрелы рычага, а
его косинусная обмотка через третий выпрямитель подключена к первому входу второго суммирующего усилителя, второй вход которого соединен через первый выпрямитель с однофазной обмоткой первого сель2Q сина, а выход второго суммирующего усилителя подключен ко входу возбудителя генератора.
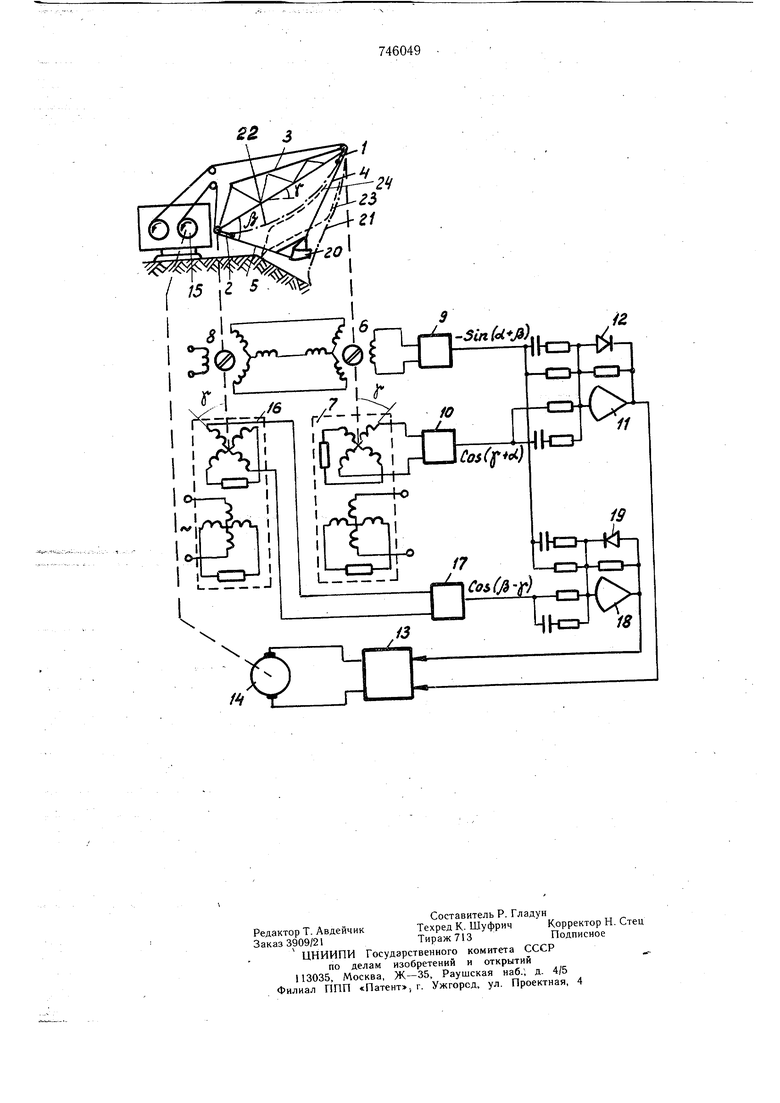
Сущность изобретения поясняется чер тежом.
Экскаватор-драглайн содержит первый 1 и второй 2 рычаги, установленные соответственно на вершине и у основания стрелы 3, ШийКОйёц каждого из них лежит соответственно на подъемном 4 и тяговом 5 канатах. Ось вращения первого рычага 1 соединена с валом первого сельсина 6 и первого синусно-косинусного вращающегося трансформатора 7, причем вал вращающегося трансформатора 7 повернут относительно вала первого сельсина 6 на угол, равный углу наклона стрелы 3 к горизонту, так что нулевое положение вала вращающегося трансформатора 7 соответствует горизонтальному положению первого рычага 1. Ось вращения второго рычага 2 соединена с валом второго сельсина 8.
На статорную обмотку первого вращающегося трансформатора 7 и однофазную обмотку второго сельсина 8 подключено переменное напряжение питания. Трехфазные обмотки первого 6 и второго 8 сельсинов соединены между собой, а однофазная обмотка первого сельсина 6 и косинусная обйотка ротора первого вращающегося трансформатора 7 подключены через первый 9 и второй 10 выпрямители на входы суммирующего усилителя 11/ в цепь обратной связи которого включен диод 12, а выход подключен на вход преобразователя 13, питающего двигатель 14 тяговой лебедки 15, на которую наматьшается тяговый канат 5.
В качестве преобразователя 13 может применяться генератор с возбудителем либо тиристорный преобразователь с блоком импульсно-фазового управления.
Экскаватор-драглайн включает в себя также второй синусно-косйнусный вращающийся трансформатор 16, третий выпрямитель 17 и второй суммирующий усилитель 18 с диодом 19 в цепи его обратной связи, причем вал второго синусно-косинусного вращающегося трансформатора 16 соединен С осью вращения установленного у основания стрелы 3 второго рычага 2, связанного с тяговым канатом 5, а его косинусная обмотка через третий выпрямитель 17 подключена к первому вхЬду второго суммИрующего усилителя 18, второй вход которого соединен через первый выпрямитель 9 с однофазной обмоткой первого сельсина 6, а его выход подключен ко входу преобразователя 13, питающего двигатель 14 тяговой лебедки 15.
Вал второго вращающегося трансформатора 16 повернут относительно вала второго сельсина 8 на угол /, равный углу наклона стрелы 3 к горизонту, так что нулевое поло Женйевала второго вращающегося трансформатора 16 соответствует горизонтальному положению второго рычага 2.
При любом положении ковща 20 в про цёссе его транспортировки углы поворота
валов первого сельсина 6 и первого синуснокосинусного вращающегося трансформатора 7 равны углу а между осью стрелы и подъемным канатом 4, а углы поворота валов второго сельсина 8 и второго синусно-косинусного вращающегося трансформатора
16 равны углу между осью стрелы и тяговым канатом 5. При этом на выходе первого сельсина 6 после выпрямления получается напряжение, пропорциональное синусу суммы углов аи Д т. е. Sin(o+ j3), на выходе первого вращающегося трансформатора 7, вал которого повернут относительно вала первого сельсина 6 на угол у наклона стрелы к горизонту, получается напряжение, пропорциональное косинусу суммы углов Y и а, т. е. Cos (у + а), а на
выходе второго вращающегося трансформатора 16, вал которого повернут относительно вала второго сельсина 8 на угол у наклона стрелы к горизонту в сторону вычитания углов, получается напряжение, пропорциональное косинусу разности углов уЗ и у,
° т. е. Cos(/3- у).
Граница 21 положений ковща 20, разделяющая рабочую зону (слева от границы 21) и зону саморазгрузки ковща (справа от границы 21), соответствует выполнению
5 равенства Cos (у + а) -k-Sin(o + ;S) О, где К - постоянный коэффициент, характеризующий положение границы зоны саморазгрузки и зависящий от конструкции и параметров упряжи ковща (,3).
Положительному значению левой части указанного вьфажения соответствует положение ковша в рабочей зоне, а отрицательному - в зоне саморазгрузки.
Граница 22 положений ковща 20, разделяющая рабочую зону (справа и снизу
5 от границы 22) и зону недопустимых нагрузок в рабочем оборудовании (выще границы 22), соответствует выполнению равенства Cos() -C.Sin(a + j8) О, где С - постоянный коэффициент, характеризующий положение указанной границы
| и соответствующий допустимой величине нагрузок в рабочем оборудовании (С л 1,9). Отрицательному значению левой части указанного выражения соответствует положение ковща в рабочей зоне, а положи, тельному - в зоне недопустимых нагрузок в рабочем оборудовании.
Напряжения с выходов первого 9 и второго 10 выпрямителей, пропорциональные величинам -Sm(a+y5) и COS(Y + «), подаются на входы первого суммирующего
0 усилителя 11, причем передаточный коэффициент этого усилителя для входного сигнала - Sin(0:4- yj) выбирается равным К, а передаточный коэффициент для входного сигнала Cos (у + а.) выбирается равным 1. Напряжения с выходов первого 9 итретьего 17 выпрямителей, пропорциональные величинам -Sin(a+j3) и Cos(), подаются входы второго суммирующего усилителя 18, причем передаточный коэффиЦиент этого усилителя для входного сигнала - Sin (а + /) выбирается равным С, а передаточный коэффициент для входного сигнала Cos(-у) выбирается равным 1.
Экскаватор-драглайн работает следующим образом.
При движении ковша 20 в рабочей зоне разность Cos(v + a) - If.-Sin(а +/3) положительна. Поскольку при этом опасности саморазгрузки ковша нет, выходной сигнал первого суммирующего усилителя 11 должен быть равен нулю. Это обеспечивается благодаря наличию диода 12 в цепи его обратной связи. Потенциал входной точки операционного усилителя 1, к которой подключен анод диода, практически равен нулю (по одному из осйовных свойств таких усилителей), а выходное напряжение усилителя при положительном входном сигнале отрицательно. При этом диод 12 открыт, потенциал выходной точки операционного усилителя 1 Г практически равен потенциалу входной точки, т. е. близок к нулю.
Если в результате неправильного воздействия на привод со стороны машиниста или системы автоматического управления траектория ковша направлена из рабочей зоны в зону саморазгрузки (например, траектория 23), то после подхода ковша 20 к границе 21 разность Со5(у + а) - k Sin(a-fy) становится отрицательной, на выходе первого суммирующего усилителя 11 появится положительный сигнал (диод 12 при этом закрыт), который воздействует через преобразователь 13 на двигатель 14 таким образом, что уменьшается скорость сматывания тягового каната 5 с лебедки 15 и выход ковша в зону саморазгрузки исключается. Если при этом происходит подъем ковша 20 к вершине стрелы 3, то в дальнейшем его траектория будет проходить вдоль границы 21 рабочей зоны, а выход ковша 20 в зону саморазгрузки будет исключен.
При движении ковша 20 в рабочей зоне разность Cos(;S- у ) - С Sin( а + у) отрицательна и выходной сигнал второго суммирующего усилителя 18 равен нулю, благодаря наличию диода 19 в цепи его обратной связи, который исключает возможность появления на выходе усилителя 18 положительного сигнала.
Если в результате неправильного воздействия на приводы со стороны машиниста или системы автоматического управления траектория ковша направлена из рабочей зоны в зону недопустимых нагрузок в рабочем оборудовании (например, траектория 24),
то после подхода ковша 20 к границе 22 разность Cos(/3-у)-C-Sin(a+/3) становится положительной, на выходе второго суммирующего усилителя 18 появится отрицательный сигнал (диод 19 при этом закрыт), который воздействует через преобразователь 13 на двигатель 14 таким образом, что увеличивается Скорость сматывайия тягового каната 5 с лебедки 15 и выход ковша в зону недопустимых нагрузок исключается. Если при этом происходит подъем ковша 20 к вершине стрелы 3, то в дальнейшем его траектория будет проходить вдоль границы 22 рабочей зоны, а выход ковша 20 в зону недопустимых нагрузок в рабочем оборудовании будет исключен.
Включение конденсаторов на входах суммирующих усилителей 11 и 18 позволяет обеспечить упреждающее воздействие на двигатель 14 в функции скорости приближения ковша 20 к границам рабочей зоны, исключить колебательность и перерегулирование во время переходных процессов.
Изобретение позволяет обеспечить зашиту экскаватора-драглайна не только от преждевременной саморазгрузки ковша, но и от недопустимых нагрузок в рабочем оборудовании в процессе транспортировки ковша, исключая возможность выхода ковша за пределы рабочей зоны, что повышает надежность экскаватора-драглайна.
Формула изобретения
Экскаватор-драглайн по авторскому свидетельству № 338595, отличающийся тем, что, с целью его зашиты от недопустимых нагрузок в рабочем оборудовании в процессе транспортировки ковша, он снабжен вторым синусно-косинусным врашающимся трансформатором, третьим выпрямителем, вторым суммирующим усилителем с диодом в цепи его обратной связи и четырьмя времязадаюшими RC-цепочками, включенными соответ: ственно между выходами выпрямителей и входами суммируюших усилителей, причем вал второго синусно-косинусного вращающегося трансформатора соединен с осью вращения установленного у основания стрелы рычага, а его косинусная обмотка через третий выпрямитель подключена к первому входу второго суммирующего усилителя, второй вход которого соединен через первый выпрямитель с однофазной обмоткой первого сельсина, а выход второго суммирующего усилителя подключен ко входу возбудителя генератора. 22. 3
