Известнь е захваты дпя штучиых грузов, например для подъема и перемещения мульд, представляют собой траверсу, на протнвоноложных концах которой шарнирно закреплены крюки, расположенные в параллельных плоскостях зевами иавстрсчу друг другу. Поворот крюков осуществляется посредством мехаиизмов подъема с гибким тяговым органом.
Особенностью описываемого захвата для штучиых грузов является то, что его крюки вы.полнеиы в соедииении с приводом поворота их вокруг вертикальной оси, смонтированным непосредствеино на раме, жестко соединенной с грузоподъемной тележкой крана.
В таком захвате крюки обеспечивают захват мульд, расположенных на минимальном расстоянии друг от друга.
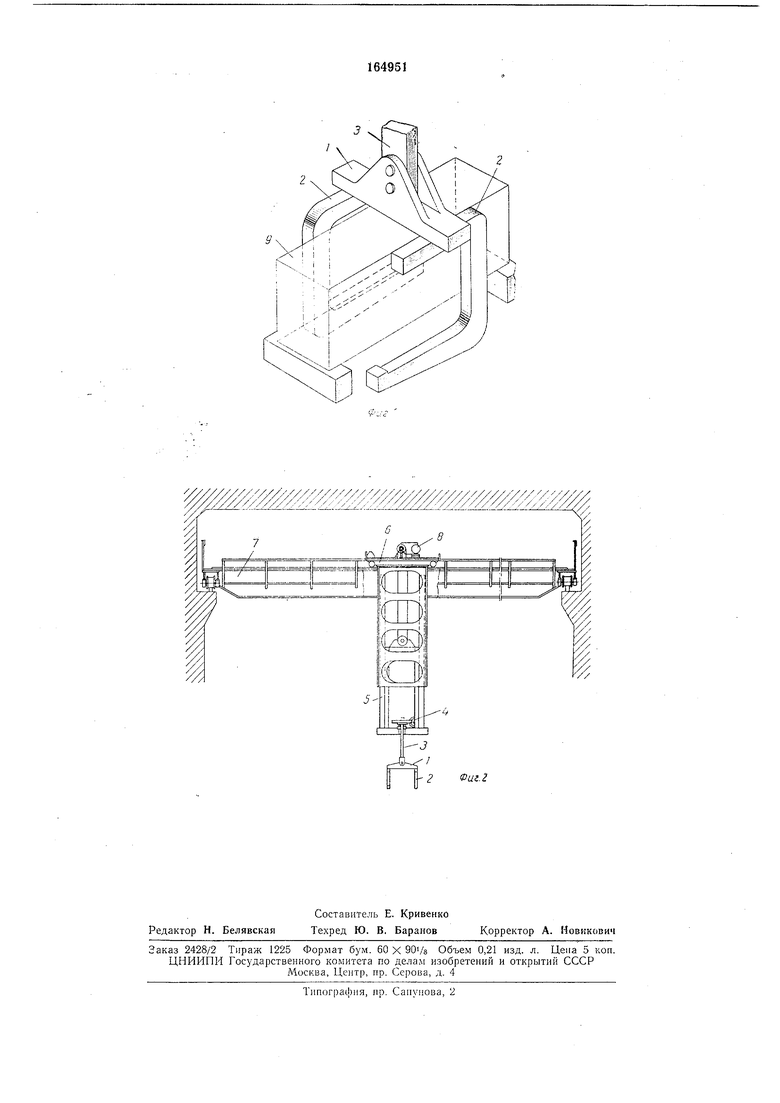
На фиг. 1 схематически изображеи захват для .штучиых грузов; на фиг. 2 - мостовой :кран с захватом для штучных грузов.
На противоположных концах траверсы / гжестко закреплены два крюка 2, которые расшоложены наралле.льно, зевами павстречу друг
другу.
Траверса, в свою очередь, жестко соединена с тягой 3, которая связана с приводом 4 поворота захвата.
Привод поворота смонтировап иа раме 5, ;жестко соединенной с грузоподъемной тележ;кой 6 крана 7.
Механизм подъема 8 захвата смонтнрован пеносредственно на грузоподъемной тележке 6 крана 7.
Захват штучного груза 9 происходит следующим образом: кран с захватом перемещают к штабелю штучных грузов, опуская раму с захватом до тех пор, пока крюки, расположенные иараллельно оси груза, не окажутся инже его. После этого В1 лючают нривод поворота захвата и траверса с крюками и тягой поворачивается на 90° вокруг вертикальной оси. Затем включается механизм подъема захвата, и груз транспортируется к месту назначения.
Предмет и з о б р е т е и и я
Захват для штучных грузов, например для по,а,ъема и иеремещения мульд, представляющий собой траверсу с шариирио укреплеиными на ее концах крюкамн, расиоложениыми в параллельных плоскостях зевами навстречу друг другу, движение которых осуществляется с иомощью приводного механизма, от л и ч а ющн и с я тем, что, с целью обеспечения прп посадке захвата на поднимаемый груз возможности ввода крюков его в предельпо узкие промежутки между смежными грузами, крюки выполнены в соедннении с приводом поворота их вокруг вертикальной оси, смонтироваиным непосредственно на раме, жестко соединенной с грузонодъемной тележкой крана.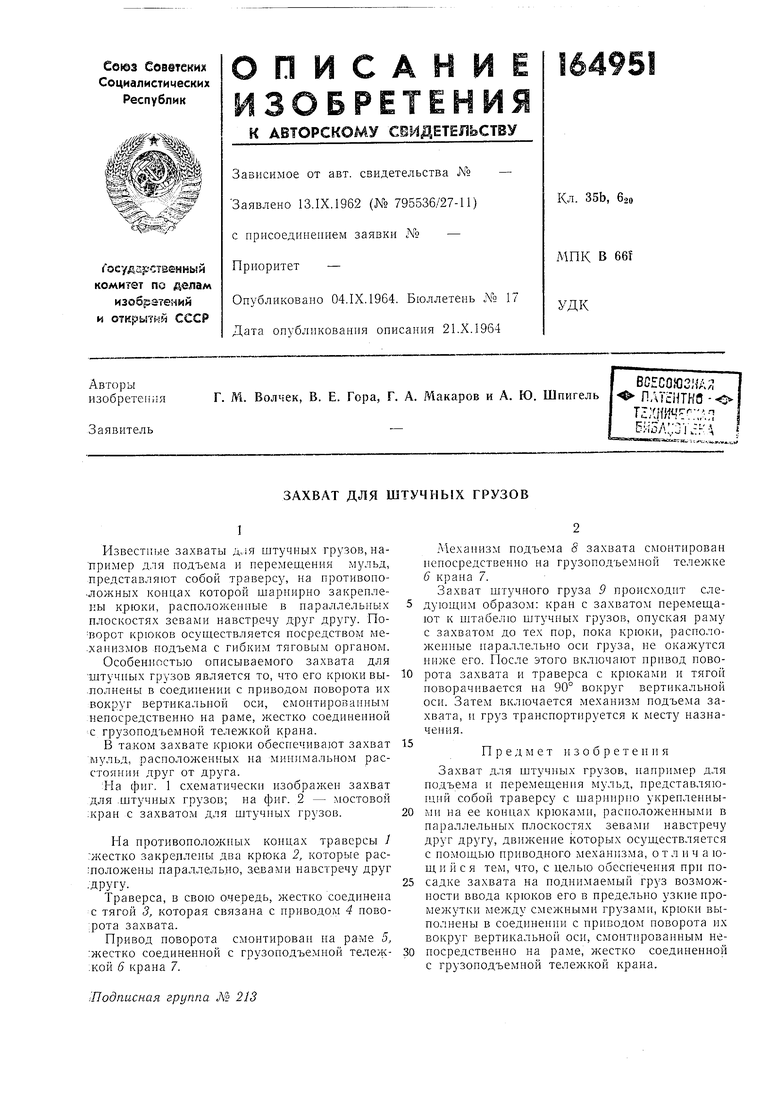
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1967 |
|
SU206067A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU375249A1 |
| ЗАХВАТ ДЛЯ ШТУЧНЫХ ГРУЗОВ | 1972 |
|
SU426951A1 |
| Устройство для подъема и транспортировки грузов | 1977 |
|
SU676534A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1973 |
|
SU388994A1 |
| КРАНОВЫЙ ВИЛОЧНЫЙ ЗАХВАТ | 1973 |
|
SU405802A1 |
| Автоматический захват | 1981 |
|
SU977358A1 |
| МАГНИТНО-МЕХАНИЧЕСКИЙ ЗАХВАТ ДЛЯ ПАКЕТОВ ТРУБ | 1970 |
|
SU271767A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
2 Pui.2
