Изобретение относится к станкостроению, в частности к токарным станкам с числовым программным управлением.
Цель изобретения - упрощение конструкции и повышение производительности..
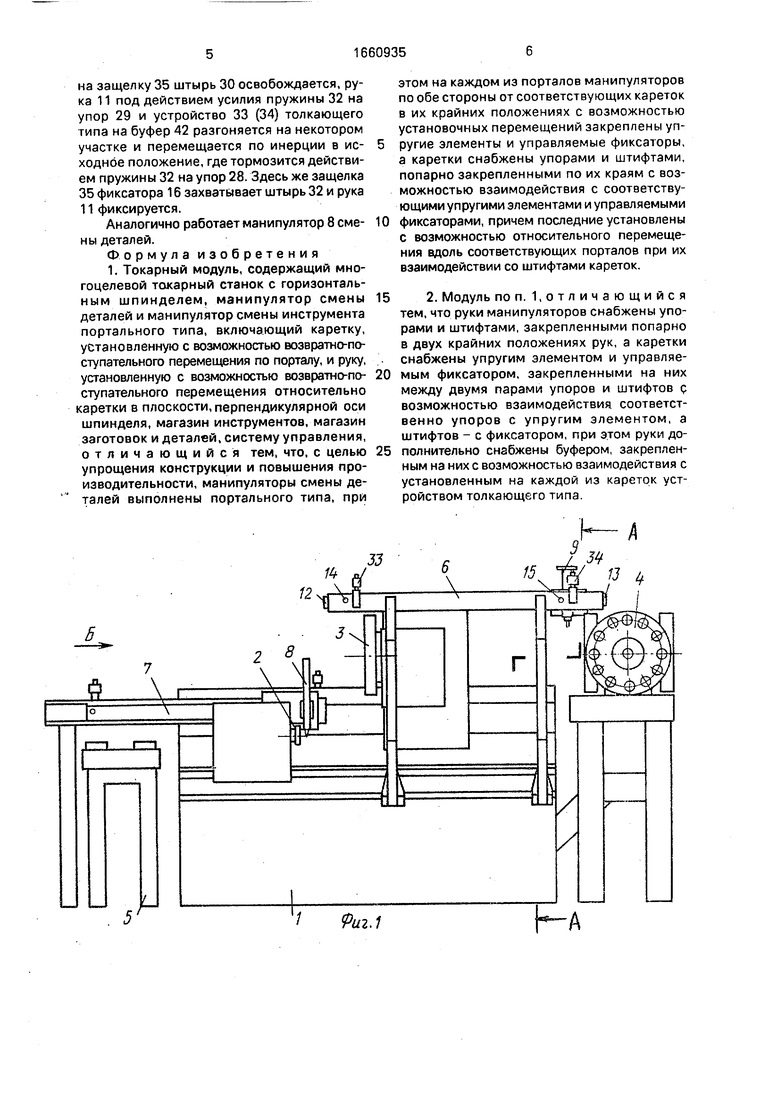
На фиг, 1 показан токарный станочный модуль, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг, 3 -вид Б на фиг. 1; на фиг. 4 - принципиальная схема привода каретки; на фиг. 5 и 6 - принципиальная схема привода руки манипулятора соответственно в верхнем и нижнем положениях.
Токарный модуль содержит многоцелевой токарный станок 1 (фиг. 1)со шпинделем 2 и револьверной головкой 3, магазин 4 инструментов, магазин 5 заготовок и деталей, порталы 6, 7, на которых установлены манипулятор 8 смены деталей и манипулятор 9 смены инструмента.
Манипулятор смены инструмента 9 состоит из каретки 10 (фиг. 4), руки 11 манипулятора, приводов 12, 13 каретки 10 (фиг. 1), штырей 14, 15, закрепленных на порталах 6 и 7, фиксатора 16 руки манипулятора (фиг. 2) и ее привода,
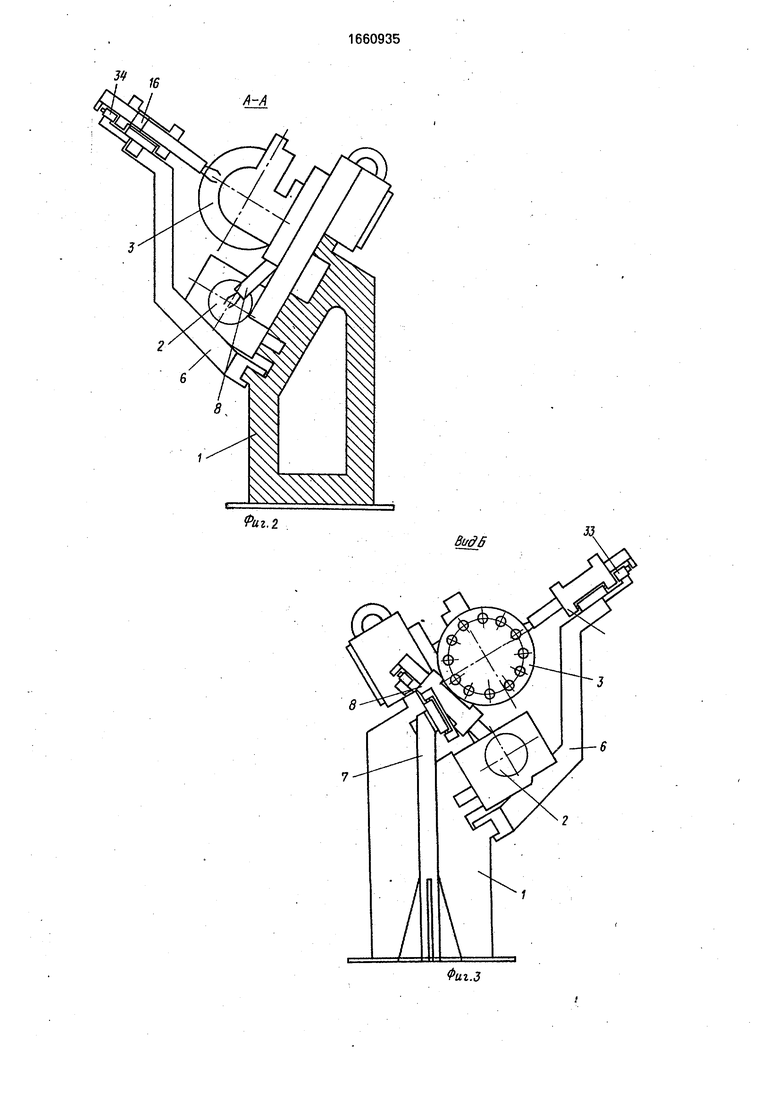
Привод 12 каретки манипулятора 9 смены инструмента включает в себя пружину 17, силовой цилиндр 18, а привод 13 - соответственно пружину 19 и силовой цилиндр 20. Кроме того, привод 12 включает в себя фиксатор, состоящий из защелки 21, пружины 22 и электромагнита 23, Фиксатор привода 13 включает в себя соответственно защелку 24, пружину 25 и электромагнит 26. Рука 11 состоит из направляющей 27 (фиг, 5, 6), упоров 28, 29, штырей 30, 31. Привод руки манипулятора состоит из пружины 32, устройств 33, 34 толкающего типа (фиг. 4).
Фиксатор 16 (фиг. 2) закреплен на каретке 10 (фиг. 5, 6) и состоит из защелки 35, пружины 36 и электромагнита 37. На каретке закреплены штыри 38, 39 и упоры 40, 41. На руке манипулятора установлен буфер 42. Манипулятор смены заготовок и деталей имеет аналогичную компановку.
Токарный модуль работает следующим образом,
В исходном положении каретка 10 манипулятора 9 смены инструмента расположена над револьверной головкой 3. Рука 11 манипулятора находится в стороне от револьверной головки 3. Рука 11 перемещается к револьверной головке 3, осуществляется захват инструмента. Каретка 10 перемещается от револьверной головки под действием штока силового цилиндра 18, при этом инструмент выводится из гнезда револьверной головки и пружина 17 сжимается. Рука 11 перемещается от револьверной головки.
Срабатывает защелка 21 от электромагнита 23, а каретка 10 под действием усилия пружины 17 на упор 40 разгоняется на некотором участке и перемещается по инерции
в позицию смены инструмента в магазине инструмента, где осуществляется торможение каретки за счет действия пружины 19 на упор 41.
Защелка 24 захватывает штырь 39, при
0 этом упор 41 поджимает пружину 19. Рука 11 перемещается к магазину инструмента 4. От штока силового цилиндра 20 каретка перемещается к магазину инструментов, Инструмент входит в гнездо магазина инструмента
5 4. Захват расфиксируется, отпускает инструмент, Рука 11 перемещается от магазина инструментов. Осуществляется поворот магазина инструментов до позиционирования нужного инструмента в позиции смены.
0Рука 11 перемещается к магазину инструментов, осуществляется захват инструмента. Каретка 10 перемещается от магазина 4 инструментов под действием пружины 19 на упор 41, инструмент выводится из гнезда ма5 газина 4 инструментов. Рука 11 перемещается от магазина 4 инструментов.
Под действием штока силового цилиндра 20 каретка перемещается вправо, сжимается пружина 19, срабатывает защелка 24 от
0 электромагнита 26, каретка под действием усилия пружины 19 на упор 41 разгоняется на некотором участке и перемещается по инерции в позицию смены инструмента в револьверной головке 3, где осуществляет5 ся торможение каретки за счет действия пружины 25 на упор 40.
Фиксатор 16 захватывает штырь 38, шток силового цилиндра 18 перемещает каретку влево, при этом упор 40 сжимает пружину
0 17. Рука 11 перемещается к револьверной головке. Под действием пружины 17 на упор 40 каретка 10 перемещается к револьверной головке 3, инструмент входит в гнездо револьверной головки. Захват расфиксирует5 ся, отпускает инструмент. Рука 11 перемещается от револьверной головки 3. Цикл работы завершен.
Перемещение руки манипулятора смены инструмента (смены заготовок и деталей)
0 осуществляется следующим образом. От электромагнита 37 защелка 35 отпускает штырь 31, рука 11 перемещается в позицию смены под действием усилия пружины 32 на упор 28. В нижнем положении защелка 35 фикса5 тора 16 захватывает штырь 30 под действием пружины 36, при этом торможение руки 11 осуществляется действием пружины 32 на упор 29.
Для перемещения из позиции смены в исходное под действием электромагнита 37
на защелку 35 штырь 30 освобождается, рука 11 под действием усилия пружины 32 на упор 29 и устройство 33 (34) толкающего типа на буфер 42 разгоняется на некотором участке и перемещается по инерции в ис- ходное положение, где тормозится действием пружины 32 на упор 28. Здесь же защелка 35 фиксатора 16 захватывает штырь 32 и рука 11 фиксируется.
Аналогично работает манипулятор 8 сме- ны деталей.
Формула изобретения 1. Токарный модуль, содержащий многоцелевой токарный станок с горизонтальным шпинделем, манипулятор смены деталей и манипулятор смены инструмента портального типа, включающий каретку, установленную с возможностью возвратно-поступательного перемещения по порталу, и руку, установленную с возможностью возвратно-по- ступательного перемещения относительно каретки в плоскости, перпендикулярной оси шпинделя, магазин инструментов, магазин заготовок и деталей, систему управления, отличающийся тем, что, с целью упрощения конструкции и повышения производительности, манипуляторы смены деталей выполнены портального типа, при
этом на каждом из порталов манипуляторов по обе стороны от соответствующих кареток в их крайних положениях с возможностью установочных перемещений закреплены упругие элементы и управляемые фиксаторы, а каретки снабжены упорами и штифтами, попарно закрепленными по их краям с возможностью взаимодействия с соответствующими упругими элементами и управляемыми фиксаторами, причем последние установлены с возможностью относительного перемещения вдоль соответствующих порталов при их взаимодействии со штифтами кареток.
2. Модуль по п. 1,отличающийся тем, что руки манипуляторов снабжены упорами и штифтами, закрепленными попарно в двух крайних положениях рук, а каретки снабжены упругим элементом и управляемым фиксатором, закрепленными на них между двумя парами упоров и штифтов р возможностью взаимодействия соответственно упоров с упругим элементом, а штифтов - с фиксатором, при этом руки дополнительно снабжены буфером, закрепленным на них с возможностью взаимодействия с установленным на каждой из кареток устройством толкающего типа.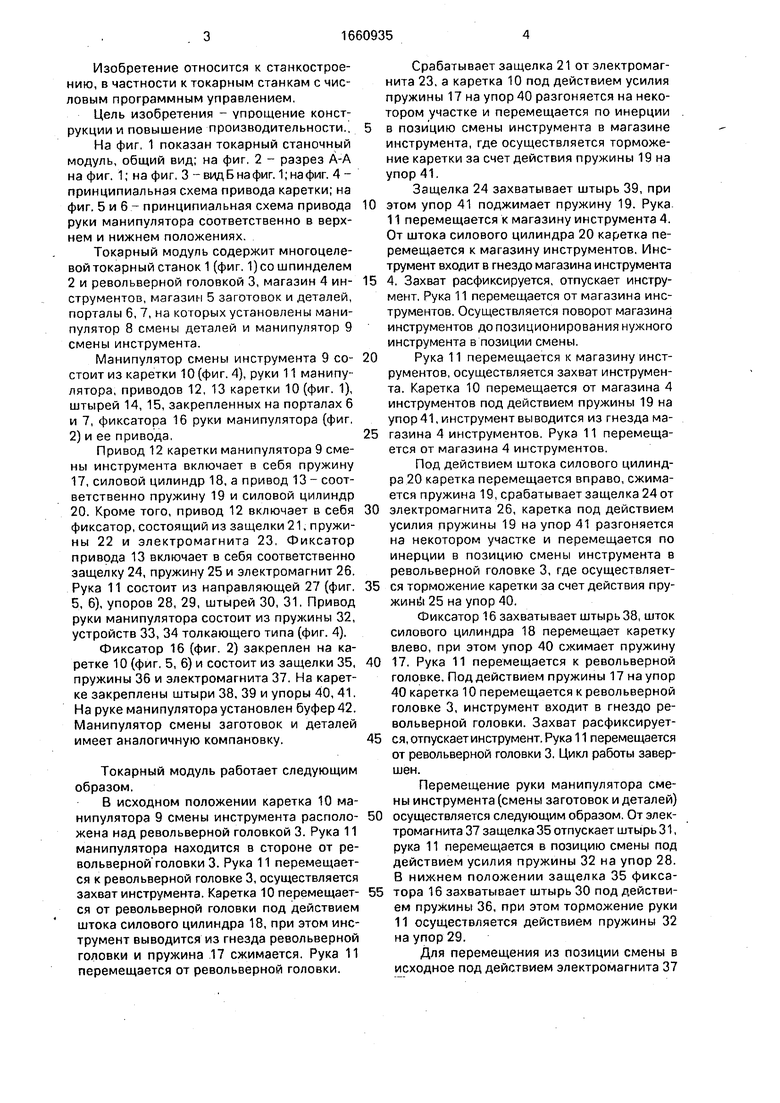
| название | год | авторы | номер документа |
|---|---|---|---|
| Револьверный суппорт токарного автомата | 1981 |
|
SU992124A1 |
| Токарный многошпиндельный автомат | 1985 |
|
SU1324766A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Головка манипулятора | 1983 |
|
SU1085807A1 |
| Токарный автомат | 1990 |
|
SU1824255A1 |
| Револьверный суппорт | 1984 |
|
SU1168337A1 |
| Устройство для зажима и подачи пруткового материала | 1986 |
|
SU1371777A1 |
| Винтоверт | 1987 |
|
SU1472204A1 |
| Механизм подачи и зажима прутка | 1985 |
|
SU1282963A1 |
| Механизм подачи пруткового материала | 1978 |
|
SU742040A1 |
Изобретение относится к станкостроению, в частности к токарным станкам с числовым программным управлением. Цель изобретения - упрощение конструкции и повышение производительности. Указанная цель достигается тем, что в крайних положениях каретки 10 манипуляторов на портале закреплены попарно пружины 17 и 19 и фиксатор с защелками 21 и 24. На каретке 10 закреплены соответственно упоры 40, 41 и штифты 38, 39. Защелка 21 за штифт 38 перемещает каретку 10 влево под действием силового цилиндра 18. Пружина 17 сжимается. Затем электромагнит 23 воздействует на защелку 21 и транзистора отпускает штифт 38. Каретка 10 под действием пружины 17 на упор 40 перемещается в другое крайнее положение, где фиксируется защелкой 24 за штифт 39. Аналогично работает рука 11 манипулятора смены инструментов и манипулятора смены деталей. Помимо аналогичного привода перемещения, на руке 11 закреплен буфер 42. С буфером 42 взаимодействует устройство толкающего типа 33 при перемещении руки 11 в верхнее положение. 1 з.п.ф-лы, 6 ил.
5
PU2.1
А-А
Риг. г
ВидВ
.30
у
35
Я
WA
1
d
.
JS
-37
/0
27
Раг.5
Рлг,Ј
| Хартли Дж | |||
| ГПС в действии | |||
| М., 1987, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
