Изобретение относится к складскому хозяйству.
Цель изобретения - повышение надежности при транспортировании грузов.
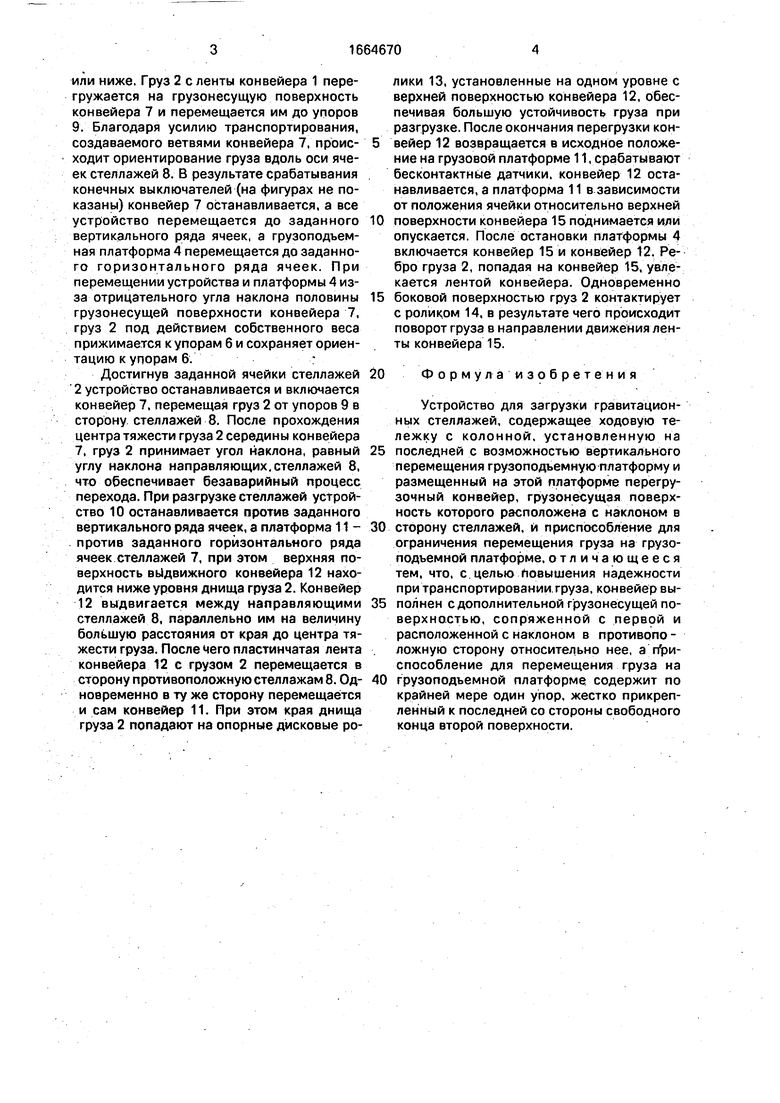
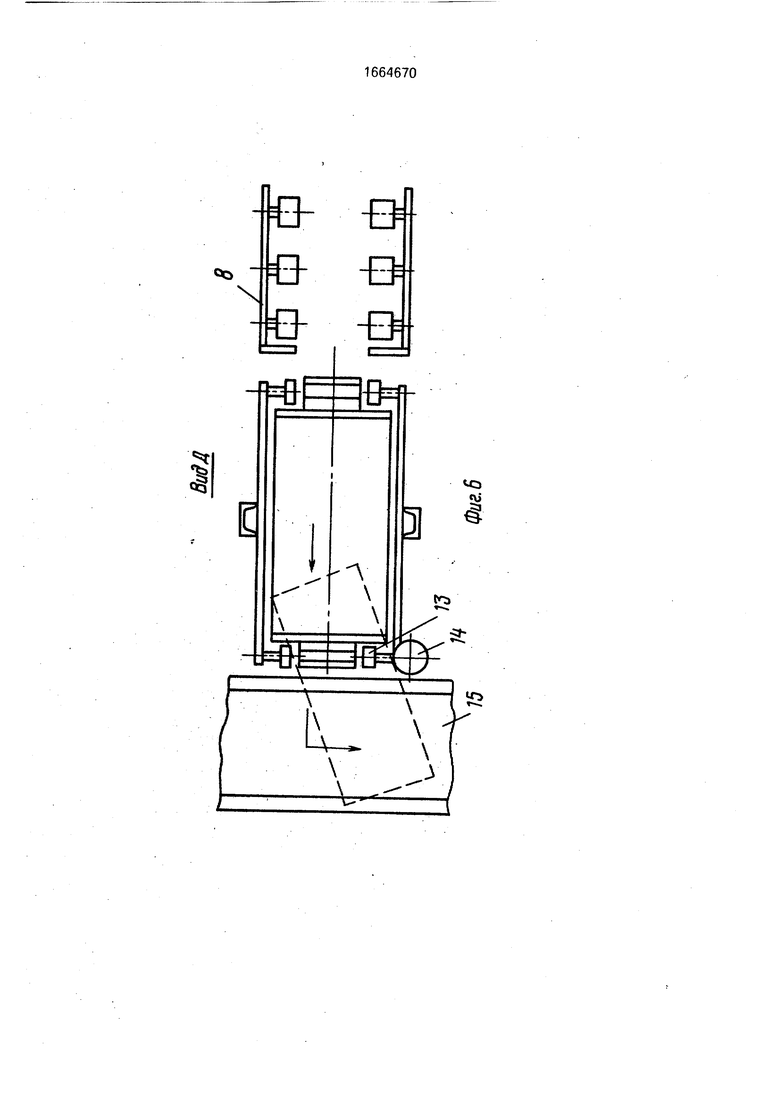
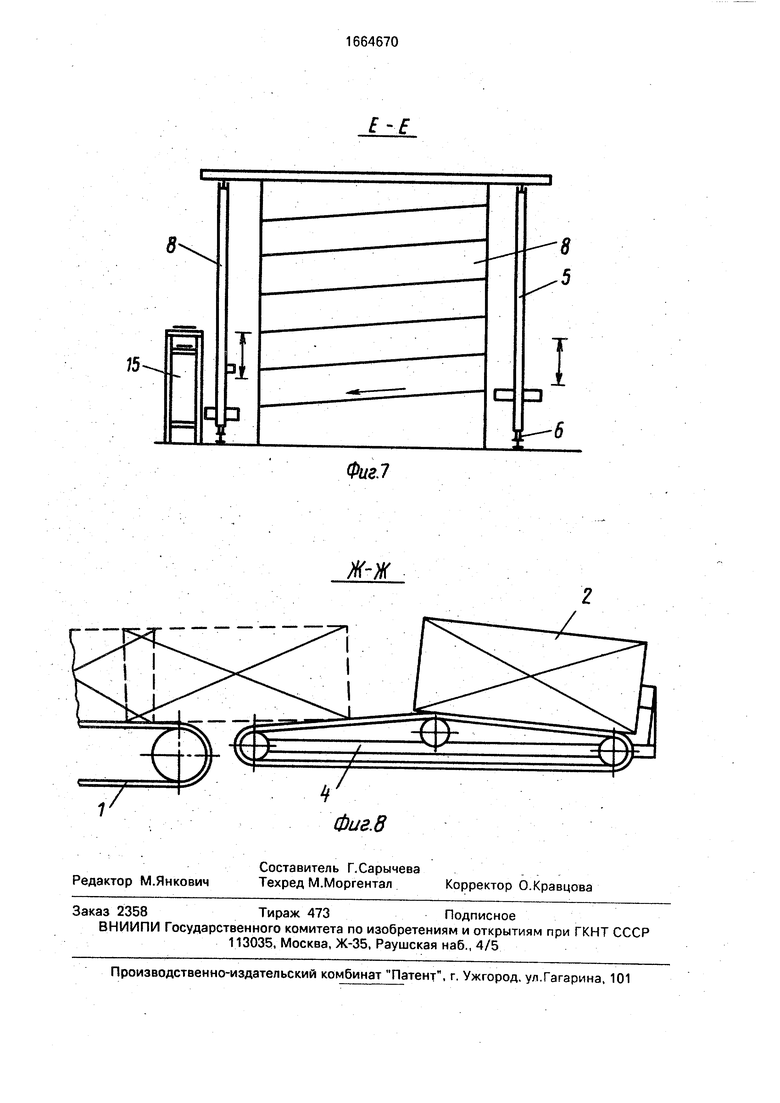
На фиг. 1 представлен общий вид склада; на фиг.2 - сечение А-А на фиг. 1; на фиг.З - сечение Б-Б на фиг. 1; на фиг.4 - вид по стрелке В на фиг.З; на фиг.5 - сечение Г-Г на фиг. 1; на фиг.6 - вид по стрелке Д на фиг.5; на фиг. 7 - сечение Е-Е на фиг.1; на фиг.З - сечение Ж-Ж на фиг. 1.
Устройство установлено на складе, имеющем подводящий конвейер 1 со средством контроля габаритов груза 2 в виде П-образ- ной рамки 3 и содержит грузоподъемную платформу 4, установленную о возможностью вертикального перемещения, на колонне 5, соединенной с ходовой тележкой 6. На платформе 4 смонтирован перегрузочный конвейер 7. грузонесущая поверхность которого выполнена с наклонными в противоположные стороны и сопряженными между собой участками. Один из участков наклонен в сторону стеллажей 8, а со стороны второго участка на платформе 4 смонтированы жестко упоры 9. Конвейер 7 имеет пару параллельных пластинчатых цепей. Разгрузка стеллажей 8 может осуществляться устройством 10, которое имеет грузоподъемную платформу 11, на которой закреплен пластинчатый конвейер 12, ролики 13 и ориентирующий ролик 14, для направления и разворота груза 2 при передаче на отводящий конвейер f5.
Устройство работает следующим образом.
Штучный груз 2 подводящим конвейером 1 подается к месту загрузки через П-об- разную рамку 3 для контроля габаритов груза, при этом устройство размещается у конца конвейера 1, а платформа 4 находится ниже последнего, и грузонесущая поверхность конвейера 7 устанавливается на уровне грузонесущей поверхности конвейер 1
w
о о
о
XI
или ниже. Груз 2 с ленты конвейера 1 перегружается на грузонесущую поверхность конвейера 7 и перемещается им до упоров 9. Благодаря усилию транспортирования, создаваемого ветвями конвейера 7, происходит ориентирование груза вдоль оси ячеек стеллажей 8. В результате срабатывания конечных выключателей (на фигурах не показаны) конвейер 7 останавливается, а все устройство перемещается до заданного вертикального ряда ячеек, а грузоподъемная платформа 4 перемещается до заданного горизонтального ряда ячеек. При перемещении устройства и платформы 4 из- за отрицательного угла наклона половины грузонесущей поверхности конвейера 7, груз 2 под действием собственного веса прижимается к упорам 6 и сохраняет ориентацию к упорам 6.
Достигнув заданной ячейки стеллажей 2 устройство останавливается и включается конвейер 7, перемещая груз 2 от упоров 9 в сторону стеллажей 8. После прохождения центра тяжести груза 2 середины конвейера 7, груз 2 принимает угол йаклона, равный углу наклона направляющих.стеллажей 8, что обеспечивает безаварийный процесс перехода. При разгрузке стеллажей устройство 10 останавливается против заданного вертикального ряда ячеек, а платформа 11- против заданного горизонтального ряда ячеек стеллажей 7, при этом верхняя поверхность выдвижного конвейера 12 находится ниже уровня днища груза 2. Конвейер 12 выдвигается между направляющими стеллажей 8, параллельно им на величину большую расстояния от края до центра тяжести груза. После чего пластинчатая лента конвейера 12 с грузом 2 перемещается в сторону противоположную стеллажам 8. Одновременно в ту же сторону перемещается и сам конвейер 11. При этом края днища груза 2 попадают на опорные дисковые ролики 13, установленные на одном уровне с верхней поверхностью конвейера 12, обеспечивая большую устойчивость груза при разгрузке. После окончания перегрузки конвейер 12 возвращается в исходное положение на грузовой платформе 11, срабатывают бесконтактные датчики, конвейер 12 останавливается, а платформа 11 в зависимости от положения ячейки относительно верхней
поверхности конвейера 15 поднимается или опускается. После остановки платформы 4 включается конвейер 15 и конвейер 12. Ребро груза 2, попадая на конвейер 15, увлекается лентой конвейера. Одновременно
боковой поверхностью груз 2 контактирует с роликом 14. в результате чего происходит поворот груза в направлении движения ленты конвейера 15.
20
Формула изобретения
Устройство для загрузки гравитационных стеллажей, содержащее ходовую тележку с колонной, установленную на
последней с возможностью вертикального перемещения грузоподъемную платформу и размещенный на этой платформе перегрузочный конвейер, грузонесущая поверхность которого расположена с наклоном в
сторону стеллажей, и приспособление для ограничения перемещения груза на грузоподъемной платформе, отличающееся тем, что, с целью повышения надежности при транспортировании груза, конвейер выполней с дополнительной грузонесущей поверхностью, сопряженной с первой и расположенной с наклоном в противопо - ложную сторону относительно нее, а приспособление для перемещения груза на
грузоподъемной платформе содержит по крайней мере один упор, жестко прикрепленный к последней со стороны свободного конца второй поверхности.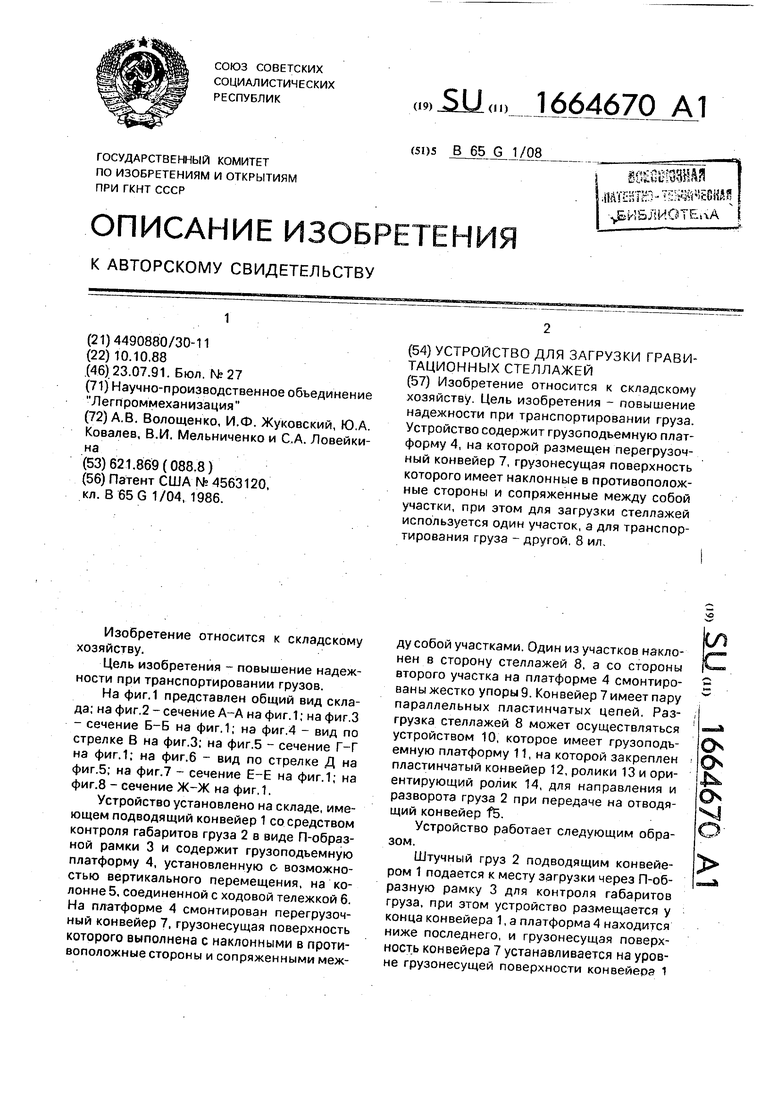
| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения штучных грузов | 1981 |
|
SU1030264A1 |
| Устройство для загрузки и разгруз-Ки СТЕллАжЕй | 1979 |
|
SU812680A1 |
| МЕХАНИЗИРОВАННЫЙ СКЛАД | 1989 |
|
RU2033377C1 |
| Устройство для загрузки и разгрузки многоярусных полочных стеллажей | 1980 |
|
SU908669A1 |
| Склад для хранения штучных грузов | 1986 |
|
SU1368232A1 |
| Перегрузочное устройство | 1978 |
|
SU802142A1 |
| Устройство для загрузки и разгрузки стеллажей поддонами | 1981 |
|
SU958271A1 |
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
| Устройство для загрузки гравитационного многоярусного стеллажа цилиндрическими изделиями | 1989 |
|
SU1654153A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
Изобретение относится к складскому хозяйству. Цель изобретения - повышение надежности при транспортировании груза. Устройство содержит грузоподъемную платформу, на которой размещен перегрузочный конвейер, грузонесущая поверхность которого имеет наклонные в противоположные стороны и сопряженные между собой участки, при этом для загрузки стеллажей используется один участок, а для транспортирования груза - другой. 8 ил.
1 ЭЛф
0Ј9fr99l
UTl
-в
Фиг.З ВидВ
8
7
V
ФиъА
Qo
N
i
т
vT
,.-e
us
I
л
t
IT
1
«
«
I
1Р
Фиа.8
Е-Е
8 5
i
Фиг.7
ж-ж
| Патент США № 4563120, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
