Изобретение относится к станкостроению, конкретно к устройствам ориентации и загрузки роторных линий штучными деталями типа тел вращения, имеющих несимметрично расположенную лыску и не поддающихся ориентации по центру тяжести и по геометрическому профилю известными роторными устройствами.
Цель изобретения - повышение надежности в работе за счет обеспечения выдачи деталей строго соориентированных вдоль вертикальной оси.
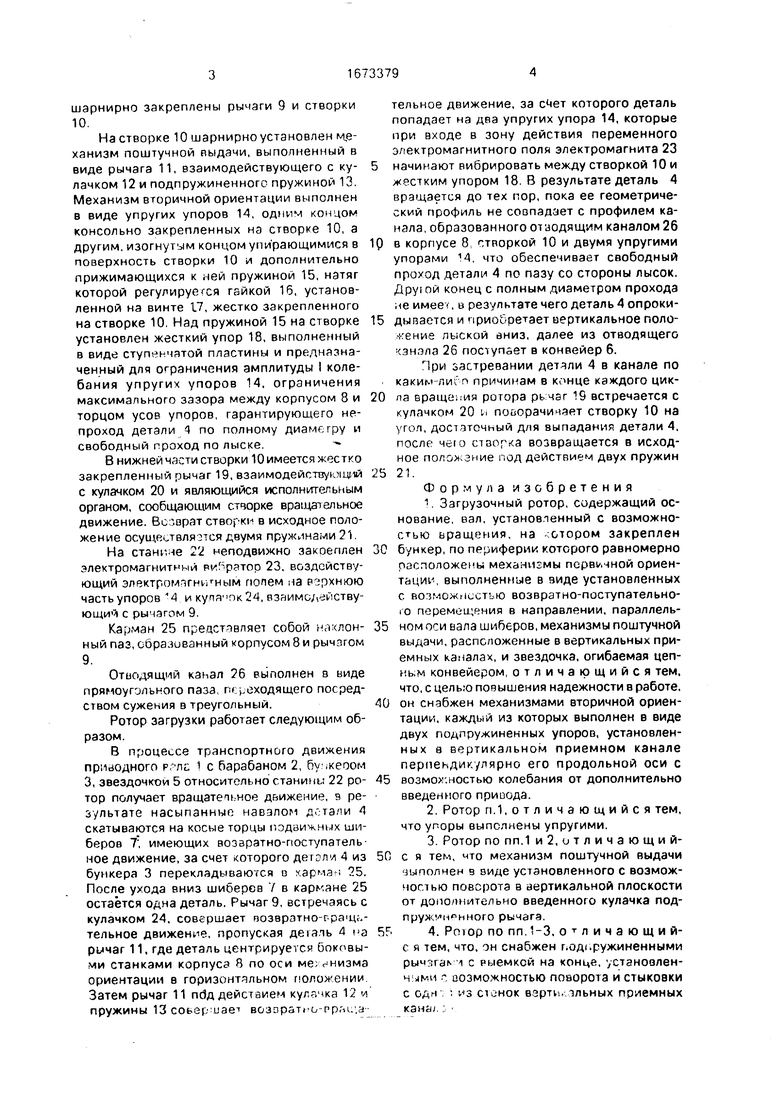
На фиг.1 изображен ротор, общий вид; на фиг.2 - узел I на фиг.1; на фиг.З - разрез А-А на фиг.1 (с возможными вариантами
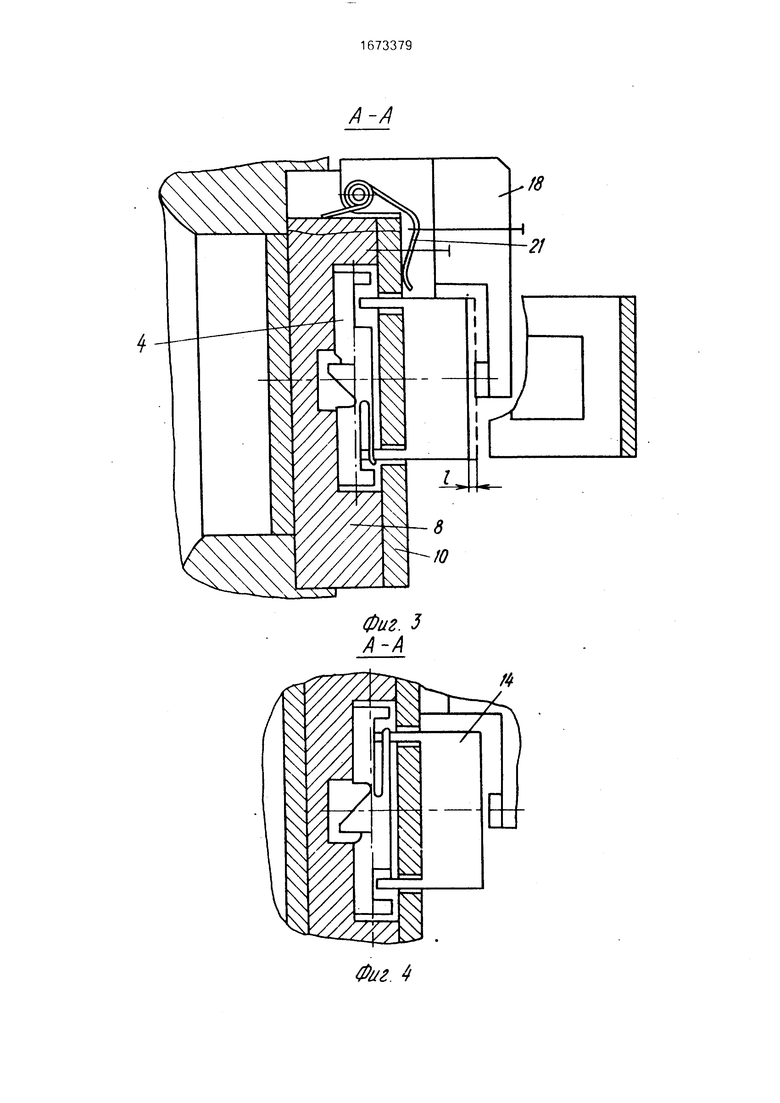
расположения детали в зоне ориентации); на фиг.4 - то же; на фиг.5 - разрез Б-Б на фиг.1.
Ротор загрузки содержит вал 1, на котором насажены барабан 2, бункер 3 с обрабатываемыми деталями 4, звездочка 5, огибаемая цепным конвейером 6. На бункере соответственно количеству позиций ротора установлены механизмы первичной ориентации, выполненные в виде телескопических шиберов 7 корпуса 8, пластины, имеющей вдоль оси открытый прямоугольный паз, переходящий посредством конического сужения в треугольный. На корпусах
о со со
XJ
о
шарнирно закреплены рычаги 9 и створки 10.
На створке 10 шарнирно установлен м,е- ханизм поштучной выдачи, выполненный в виде рычага 11, взаимодействующего с кулачком 12 и подпружиненного пружиной 13. Механизм вторичной ориентации выполнен в виде упругих упоров 14, одним концом консольно закрепленных на створке 10, а другим, изогнутым концом упирающимися в поверхность створки 10 и дополнительно прижимающихся к ней пружиной 15, натяг которой регулируемся гайкой 16, установленной на винте 17, жестко закрепленного на створке 10. Над пружиной 15 на створке установлен жесткий упор 18, выполненный в виде ступенчатой пластины и предназначенный для ограничения амплитуды I колебания упругих упоров 14, ограничения максимального зазора между корпусом 8 и торцом усов упоров, гарантирующего непроход детали 4 по полному диаметру и свободный проход по лыске.-
В нижней части створки 10 имеется жестко закрепленный рычаг 19, взаимодействующий с кулачком 20 и являющийся исполнительным органом, сообщающим створке вращательное движение. Возврат створки в исходное положение осуществлялся двумя пружинами 21. На станине 22 неподвижно закоеплен электромагнитный в ратор 23. воздействующий электромагнитным попем на езрхнюю часть упоров М и , взаимодействующий с рычагом 9.
Карман 25 представляет собой наклонный паз, образованный корпусом 8 и рычагом 9.
Отводящий канал 26 выполнен в виде прямоугольного паза, преходящего посредством сужения в треугольный.
Ротор загрузки работает следующим образом.
В процессе транспортного движения приходного рг лс 1 с барабаном 2, бу.кеоом 3, звездочкой 5 относительно станины 22 ротор получает вращатепьное движение, э результате насыпанные навалом дгтали 4 скатываются на косые торцы подвижных шиберов 7, имеющих возвратно-поступательное движение, за счет которого деголи 4 из бункера 3 перекладываются о арма-i 25. После ухода вниз шиберев 7 в кармане 25 остаётся одна деталь. Рычаг 9, встречаясь с кулачком 24, совершает чозвратно-с-ращ;,- тельное движение, пропуская 4 ра рычаг 11, где деталь центрируется боковыми станками корпуса В по оси ме; онизма ориентации в горизонтальном положении Затем рычаг 11 пбд действием кулячка 12 и пружины 13 соьер иае1 всзпратго-ррм..,а
тельное движение, за счет которого деталь попадает на два упругих упора 14, которые при входе в зону действия переменного электромагнитного поля электромагнита 23
начинают вибрировать между створкой 10 и жестким упором 18. В результате деталь 4 вращается до тех пор, пока ее геометрический профиль не совпадает с профилем канала, образованного отаодящим каналом 26
Q в корпусе 8 створкой 10 и двумя упругими упорами 14, что обеспечивает свободный проход детали 4 по пазу со стороны лысок, Друюй конец с полным диаметром прохода не имее , в результате чего деталь 4 опроки5 дьшается и приобретает вертикальное положение лыской вниз, далее из отводящего кзнэла 26 поступает в конвейер 6.
При застревании детали 4 в канале по каким-лиСп причинам в конце каждого цик0 па вращения ротора рьчаг 19 встречается с кулачком 20 i поаорачичает створку 10 на угол, достаточный для выпадания детали 4, после чего створка возвращается в исходное положение под действием двух пружин
5 21.
Формула изобретения
1.Загрузочный ротор, содержащий основание, вал, установленный с возможностью вращения, на -отором закреплен
0 бункер, по периферии которого равномерно расположены механизмы первичной ориентации, выполненные в виде установленных с возможностью возвратно-поступательно- io перемещения в направлении, параллель5 ном оси вала шиберов, механизмы поштучной выдачи, расположенные в вертикальных приемных каналах, и звездочка, огибаемая цепным конвейером, отличающийся тем. что, с целью повышения надежности в работе,
0 он снабжен механизмами вторичной ориентации, каждый из которых выполнен в виде двух подпружиненных упоров, установленных а вертикальном приемном канале перпендикулярно его продольной оси с
5 возможностью колебания от дополнительно введенного приоода.
2.Ротор п. 1,отличающийся тем, что упоры выполнены упругими,
3.Ротор по пп.1 и2,итличающий- 0 с я тем, что механизм поштучной выдачи
выполнен s виде установленного с возможностью поворота в вертикальной плоскости от дополнительно введенного кулачка под- пруж н нного рычага.
F- 4. Роюр по пп.1-3, отличающий- с я тем, что, он снабжен подпружиненными pbi4 ;raN 1 с рыемкой на конце, установленными ., возможностью поворота и стыковки с одн ; из станок взрти, чльных приемных канй; ;
О)
r- со со гСО
/ с
т //////////////////////////л
«V
ш
i
м
А-А
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротор ориентации и загрузки штучных заготовок | 1990 |
|
SU1722782A1 |
| Загрузочный ротор | 1989 |
|
SU1671441A1 |
| БУНКЕРНО-ЗАГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1994 |
|
RU2066613C1 |
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Загрузочный ротор | 1989 |
|
SU1616799A1 |
| Загрузочный ротор | 1988 |
|
SU1604555A1 |
| Автомат для обработки и контроля деталей | 1988 |
|
SU1609539A1 |
| Загрузочный ротор | 1990 |
|
SU1780988A1 |
| Роторно-конвейерная машина | 1980 |
|
SU940993A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |

Изобретение относится к станкостроению, а именно к устройствам для ориентации и загрузки роторных линий штучными деталями типа тел вращения. Цель изобретения - повышение надежности в работе за счет обеспечения выдачи деталей строго сориентированных вдоль вертикальной оси. Ротор загрузки содержит вал 1, на котором насажены барабан 2, бункер 3 с деталями 4. На бункере установлены механизмы первичной ориентации, выполненные в виде телескопических шиберов 7 корпуса 8, шарнирно закрепленных рычагов 9 и створок 10. Механизм вторичной ориентации выполнен в виде двух подпружиненных упоров, установленных в вертикальном приемном канале перпендикулярно его продольной оси с возможностью колебания от привода, выполненного в виде электромагнитного вибратора 23. На створке 10 шарнирно установлен механизм поштучной выдачи, выполненный в виде рычага 11, взаимодействующего с кулачком 12 и подпружиненного пружиной 13. В процессе транспортного движения приводного вала с барабаном 2, бункером 3, звездочкой 5 относительно станины 22 ротор получает вращательное движение, в результате насыпанные навалом детали 4 скатываются на косые торцы подвижных шиберов 7, за счет которых детали из бункера перекладываются в карман. Затем после ухода шибера в кармане остается одна деталь. 3 з.п. ф-лы, 5 ил.
Ь
/8
Фиг. 3
ft
Фиг. 4
26
Фиг. 5
| Роторный автомат питания | 1986 |
|
SU1419855A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
