Изобретение относится к области подъемно-транспортного оборудования, в частности к грузозахватным устройствам, например, промышленных роботов.
Цель изобретения - расширение функциональных возможностей путем обеспечения накопления на захвате изделий.
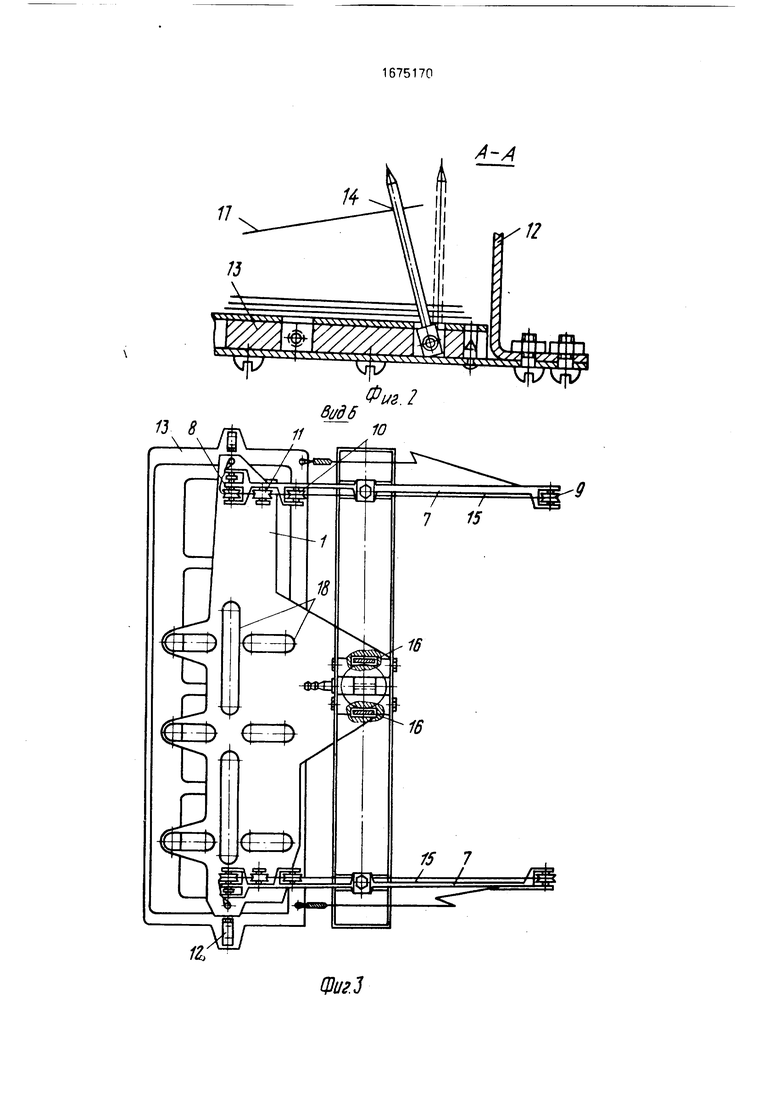
На фиг. 1 показан захват-накопитель, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 1.
Захват содержит основание 1, силовой цилиндр 2, шток 3 которого соединен с основанием 1, а корпус 4 - с подъемной машиной с помощью цапфы 5, присосные камеры 6 с центральными отверстиями, соединенными с источником вакуума, жестко закреп- ленную на корпусе 4 цилиндра 2 двухконсольную траверсу 7, концевые, промежуточный и тяговый блокив-11, шарнирно соединенную с верхним концом с консолью траверсы 7 стойку 12, на нижнем конце которой установлена съемная платформа 13с грузозахватными штырями 14, закрепленный концом на основании 1, последователь- но огибающий концевой, тяговый, промежуточный и второй концевой блоки 8, 11, 10 и 9 и закрепленный вторым концом на платформе 13 гибкий элемент 15. Основание 1 размещено между двумя пластинами 16.
Захват работает следующим образом.
Изделия 17 с отверстиями 18 уложены на столе 19. После наведения захвата подъемной машиной подается давление в над- поршневую полость цилиндра 2. Шток 3, а вместе с ним и основание 1 перемещаются вниз. При этом за счет натяжения гибкого элемента 15 и перемещения его по блокам 8-11 стойки 12 поворачиваются, чем обеспечивается доступ присосных камер 6 к изделию 17. После касания камер б изделия 17 в ней создается вакуум, что обеспечивает захват изделия. При последующем подъеме основания изделия перемещаются вверх, а стойка 12с платформой 13 возвращается в исходное положение. По окончании подъема присосные камеры 6 отключаются от источника вакуума и изделие под действием его веса перемещается вниз. При этом штыри 14 размещаются в отверстиях 18 изделия
17, а само изделие размещается на платформе 13. Далее цикл работы повторяется. При накоплении необходимого количества изделий 17 на платформе 13 она отсоединяется от стойки 12 и передается на следующую
операцию в соответствии с технологическим процессом.
Формула изобретения
1.Вакуумный захват для плоских изделий с отверстиями, содержащий основание
и закрепленные на нем с возможностью ограниченного предельного перемещения и соединенные с источником вакуума присосные камеры, отличающийся тем, что, с целью расширения функциональных возможностей путем обеспечения накопления изделий, он снабжен вертикальным силовым цилиндром с жестко закрепленной на нем двухконсольной поперечной траверсой, шток которого жестко соединен с основанием, а корпус выполнен с элементом для соединения с подъемной машиной, шарнирно закрепленными на консолях траверсы двумя концевыми и одним промежуточным блоками, закрепленным на основании тяговым
блоком, шарнирно закрепленными верхними концами на консоли траверсы поворотными в вертикальной плоскости стойками, прикрепленной к нижним концам последних платформой, закрепленными на платформе
ограниченно поворотными штырями-ловителями для изделия, закрепленным одним концом на основании, последовательно огибающим концевой, тяговый, промежуточный и второй концевой блоки, и закрепленным
вторым концом на платформе гибким элементом.
2.Захват поп.1, отличающийся тем, что он снабжен жестко закрепленными на корпусе цилиндра, охватывающими боковые поверхности основания направляющими для него пластинами.
11
вид б
А-А
ъ/П
Фиг. 2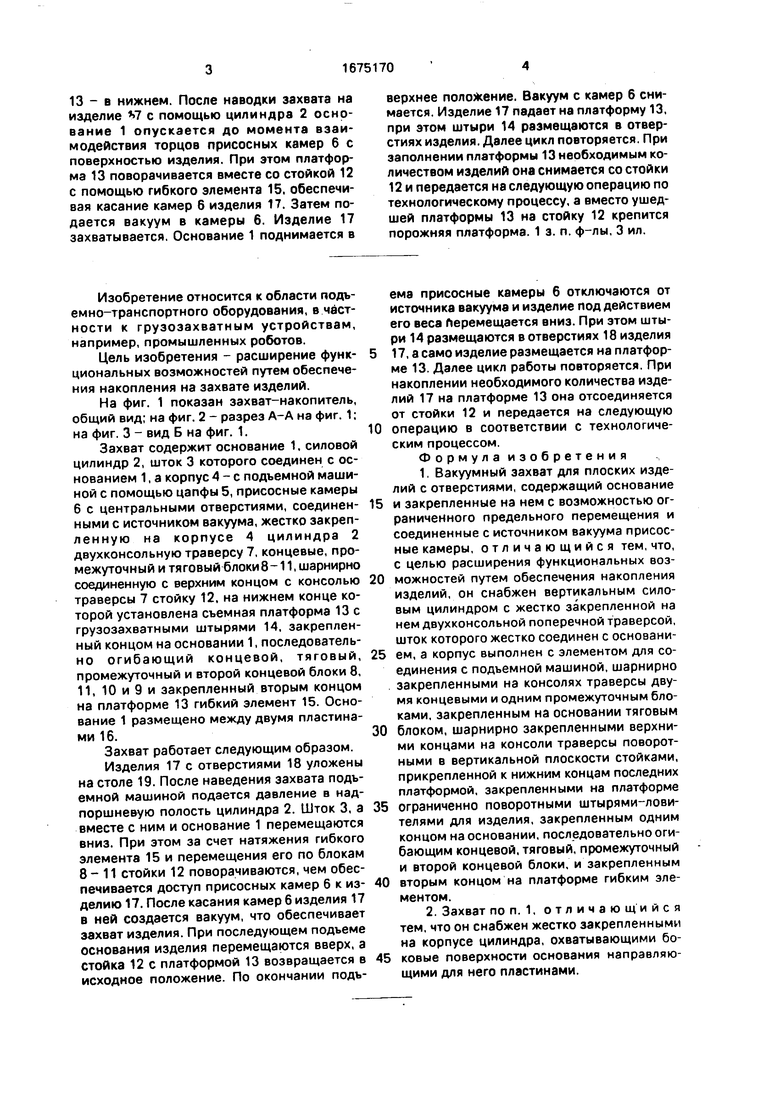
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1988 |
|
SU1615129A1 |
| УСТРОЙСТВО ДЛЯ СМЕНЫ СТРЕЛОЧНЫХ ПЕРЕВОДОВ | 2002 |
|
RU2230847C2 |
| Оголовок грузоподъемного устройства для монтажа кранов мостового типа | 1990 |
|
SU1730026A1 |
| Вакуумное захватное устройство | 1979 |
|
SU906887A1 |
| ПУТЕУКЛАДЧИК ТРАКТОРНЫЙ | 2023 |
|
RU2808047C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Вакуумное грузозахватное устройство | 1986 |
|
SU1373666A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Грузозахватное устройство | 1986 |
|
SU1418268A1 |
| Вакуумный захват | 1985 |
|
SU1281497A1 |
Изобретение относится к подъемно-транспортному оборудованию, в частности к грузозахватным устройствам. Цель изобретения - расширение функциональных возможностей путем обеспечения накопления на захвате изделий. Вакуумный захват для плоских изделий содержит основание 1, силовой цилиндр 2, присосные камеры 6. двухконсольную траверсу 7, блоки 8, 9, 10, 11, гибкий элемент 15, стойку 12 с платформой 13 и со штырями 14 В исходном положении основание 1 находится в верхнем положении, а платформа
| Вакуумный захват | 1980 |
|
SU897691A1 |
| кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
