(54) АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Автоматический захват для штучных грузов | 1980 |
|
SU874574A1 |
| Автоматический захват для штучных грузов | 1977 |
|
SU650946A1 |
| Автоматический захват | 1981 |
|
SU977358A1 |
| Захват-раскладчик | 1980 |
|
SU948835A1 |
| Захват-кантователь для цилиндрических грузов | 1978 |
|
SU919972A1 |
| Грузозахватное устройство | 1990 |
|
SU1744036A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU375249A1 |
| Захватное устройство для грузов с отбортовкой | 1983 |
|
SU1085925A1 |
I
Изобретение относится к механизации и автоматизации погрузочно-разгрузочных и монтажных работ и может быть использовано для транспортировки и монтажа штучных грузов.
Известен автоматический захват для транспортировки штучных грузов, содержащий нижнюю траверсу, на которой шарнирно закреплены захватные рычаги, соединенные с тягами и верхней траверсой, к механизм фиксации захватных рычагов в раскрытом положении, включающий закрепленную на нижней траверсе стойку, в которой установлен с возможностью перемещения ползун, закрепленный на верхней траверсе (I.
Недостатком известного захвата является невозможность захвата изделий различной конфигурации.
Цель изобретения - расширение функциональных возможностей путем обеспечения захвата изделий любой конфигурации.
Цель достигается тем, что механизм фиксации снабжен двумя симметрично расположенными относительно стойки вертушками, выполненными в виде закрепленных на
поворотной оси пластин, расположенных под углом 90° друг к другу и Г-образного фиксатора, расположенного под углом 135° к пластинам, при этом к ползуну жестко прикреплено днище и фиксаторы, расположенные над днищем симметрично относитель5 но его оси, взаимодействующие с вертущкой.
Такое выполнение автоматического захвата позволяет захватывать грузы любой конфигурации.
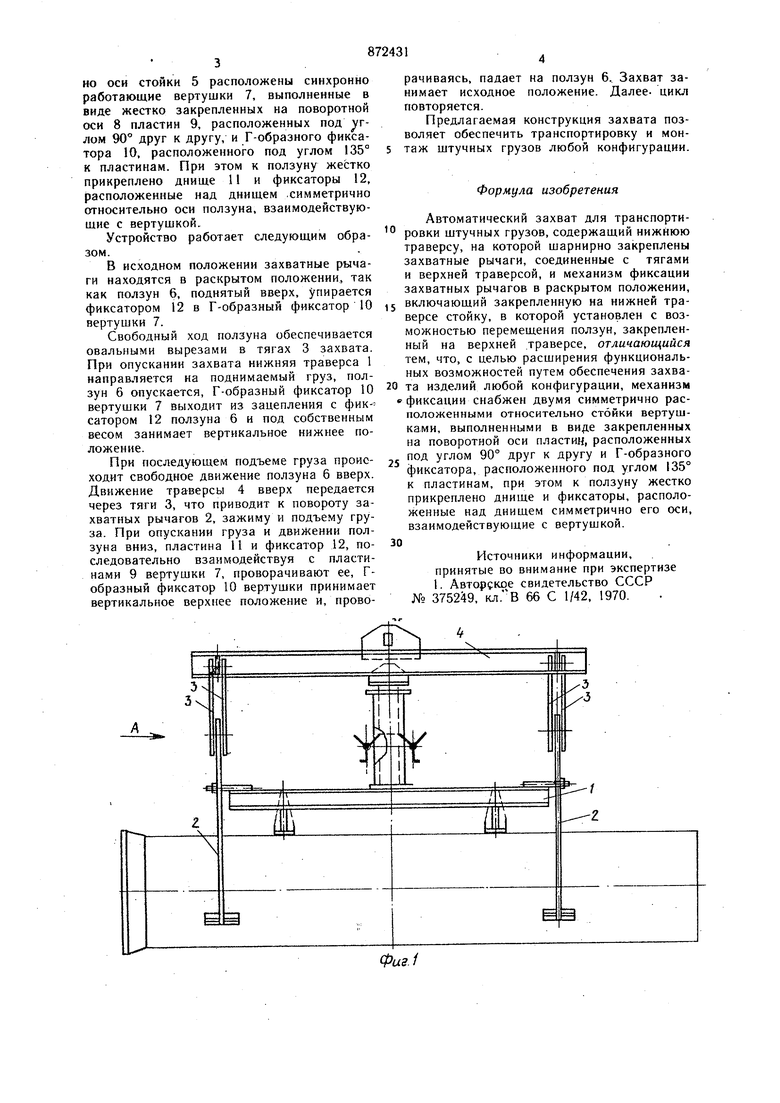
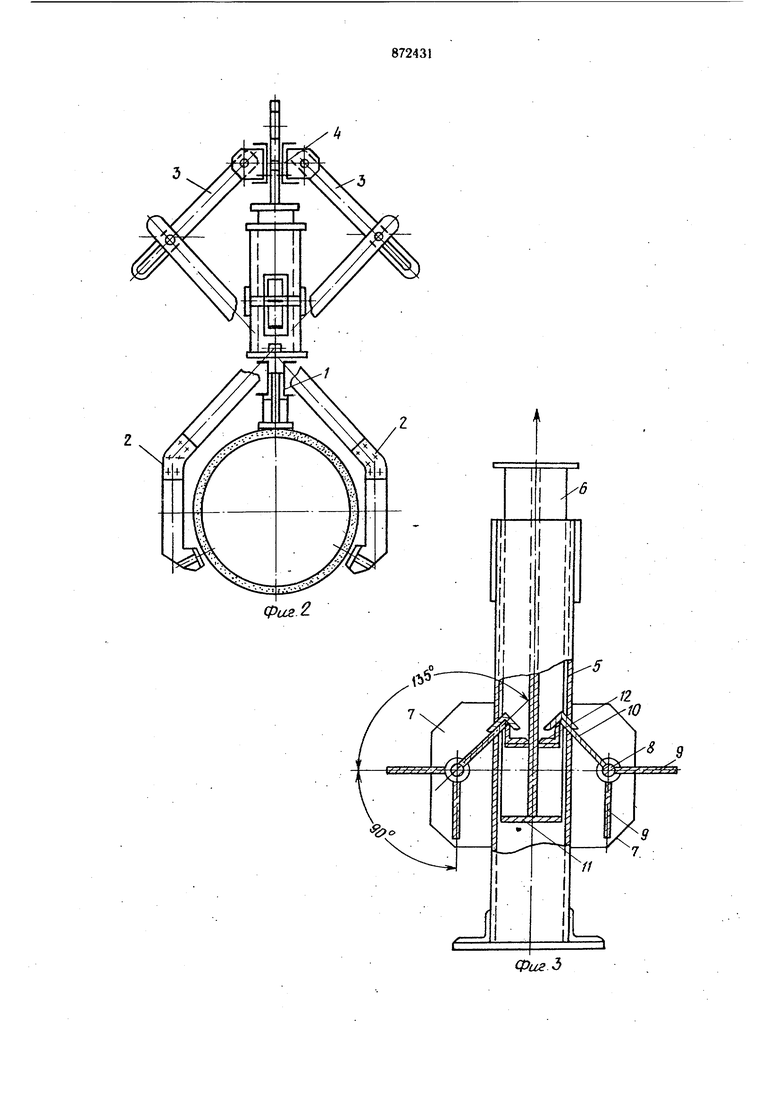
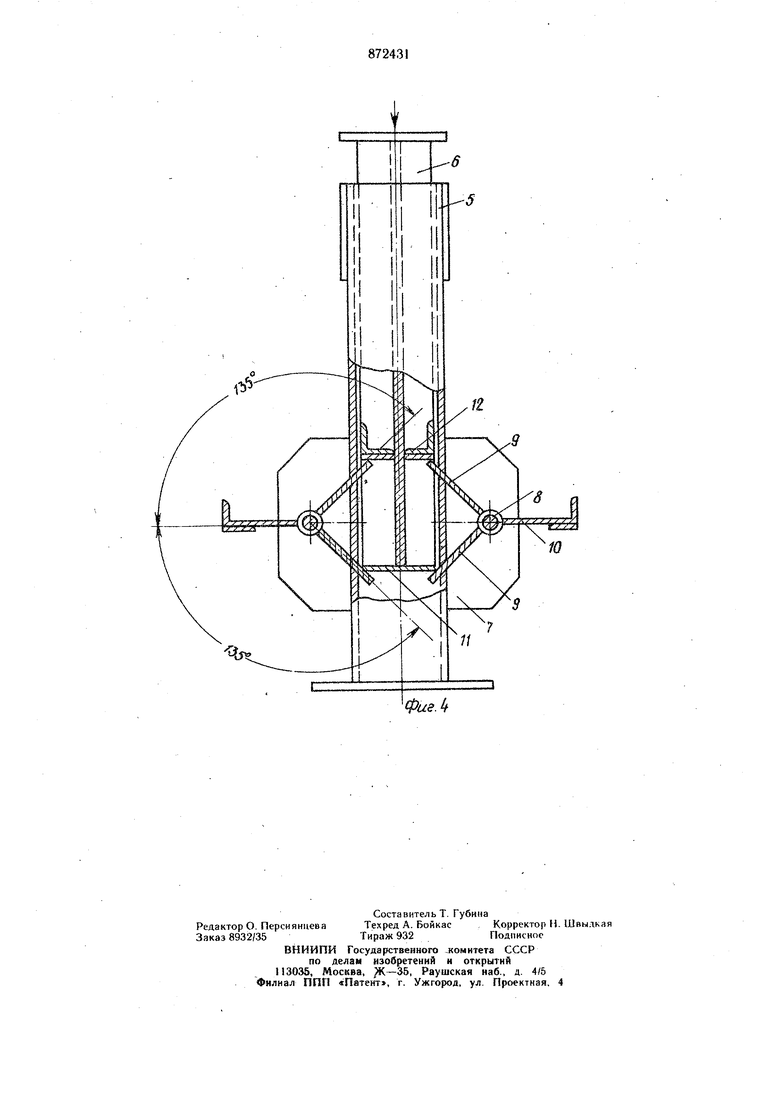
На фиг. I изображен автоматический за10хват, общий вид; на фиг. 2 - вид А на фиг. I; на фиг. 3 и 4 - механнзм фиксации.
Автоматический захват для транспортировки щтучных грузов содержит нижнюю
JS траверсу I, на которой шарнирно закреплены съемные захватные рычаги 2, соединенные тягами 3 с верхней траверсой 4, навещиваемой на крюк грузоподъемного механизма, а также механизм фиксации захватных рычагов в раскрытом положении.
20 Механизм фиксации включает стойку 5, закрепленную на нижней траверсе I и ползун 6, пере.мещающнйся в стойке и закрепленный на верхней траверсе 4. Симметрично оси стойки 5 расположены синхронно работающие вертушки 7, выполненные в виде жестко закрепленных на поворотной оси 8 пластин 9, расположенных под углом 90° друг к другу, и Г-образного фиксатора 0, расположенного под углом 135° к пластинам. При этом к ползуну жестко прикреплено днище И и фиксаторы 12, расположенные над днищем .симметрично относительно оси ползуна, взаимодействующие с вертущкой. Устройство работает следующим образом. В исходном положении захватные рычаги находятся в раскрытом положении, так как ползун 6, поднятый вверх, упирается фиксатором 12 в Г-образный фиксатор 10 вертушки 7. Свободный ход ползуна обеспечивается овальными вырезами в тягах 3 захвата. При опускании захвата нижняя траверса 1 направляется на поднимаемый груз, ползун 6 опускается, Г-образный фиксатор 10 вертушки 7 выходит из зацепления с фик- сатором 12 ползуна 6 и под собственным весом занимает вертикальное нижнее положение. При последующем подъеме груза происходит свободное движение ползуна 6 вверх. Движение траверсы 4 вверх передается через тяги 3, что приводит к повороту захватных рычагов 2, зажиму и подъему груза. При опускании груза и движении ползуна вниз, пластина 11 и фиксатор 12, последовательно взаимодействуя с пластинами 9 вертущки 7, проворачивают ее. Гобразный фиксатор 10 вертущки принимает вертикальное верхнее положение и, проворачиваясь, падает на ползун 6. Захват занимает исходное положение. Далее- цикл повторяется. Предлагаемая конструкция захвата позволяет обеспечить транспортировку и монтаж щтучных грузов любой конфигурации. Формула изобретения Автоматический захват для транспортировки щтучных грузов, содержащий нижнюю траверсу, на которой щарнирно закреплены захватные рычаги, соединенные с тягами и верхней траверсой, и механизм фиксации захватных рычагов в раскрытом положении. включающий закрепленную на нижней траверсе стоику, в которой установлен с возможностью перемещения ползун, закрепленный на верхней .траверсе, отличающийся тем, что, с целью расщирения функциональных возможностей путем обеспечения захвата изделий любой конфигурации, механизм фиксации снабжен двумя симметрично расположенными относительно стойки вертушками, выполненными в виде закрепленных на поворотной оси пластин, расположенных под углом 90° друг к другу и Г-образного фиксатора, расположенного под углом 135° к пластинам, при этом к ползуну жестко прикреплено днище и фиксаторы, расположенные над днищем симметрично его оси, взаимодействующие с вертушкой. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 375249, кл.В 66 С 1/42, 1970.
Эч 3
х.
