1
Известны грузоподъемные устройства, содержащие корпус € рычагами для отжатия его от груза.
Предлагаемое грузоподъемное устройство отличается тем, что одни концы отжимных рычагов шарнирно соединены с корпусом посредством осей, а другие через тяги - с четырехтактным механизмом фиксации рычагов от поворота, причем устройство снабл ено подвижной в вертикальной плоскости плитой, подвешенной на кронштейнах к осям корпуса, с которой взаимодействуют при освобождении устройства от груза отжимные рычаги.
Это позволяет автоматизировать процесс освобождения магнитного корпуса от груза.
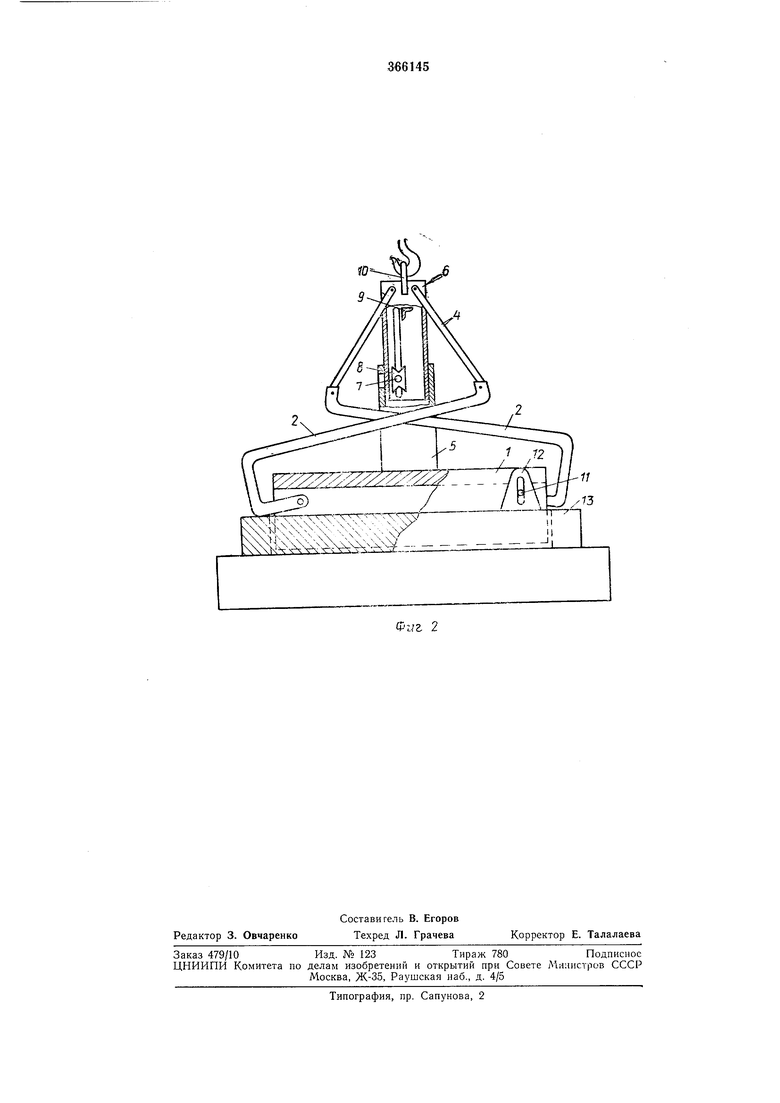
На фиг. 1 изображено предлагаемое устройство, общий вид; на фиг. 2 - то же, в момент освобождения магнитного корпуса от груза, вид сбоку.
Грузоподъемное устройство имеет магнитный корпус / с рычагами 2 для отжатия его от груза. Одни концы отжимных рычагов 2 шарнирно соединены с корпусом / посредством Осей 3, а другие через тяги 4 - с четырехтактным механизмом фиксации рычагов от поворота. Механизм фиксации имеет основание 5, жестко закрепленное на магнитном корпусе /, и ползун 6, свободно входящий в основание 5 и имеющий прорезанное окно и продольный паз. Ось 7, закрепленная на основании 5 и
проходящая сквозь продольный паз, несет на себе свободно посаженную звездочку 8. На ползуне укреплен упор 9 и установлена скоба 10, посредством которой устройство навещивается на крюк грузоподъемного механизма. На осях 11 магнитного корпуса / при помощи кронштейнов 12 с вертикальны.ми пазами подвешена плита 13 из немагнитного материала, которая имеет сквозные окна для прохождения в них полюсов .магнитного корпуса.
В исходном положении ползун 6 механизма фиксации выдвинут из основания 5, отжимные рычаги 2 повернуты, а плита 13 занимает нижнее положение. При опускании на груз плита
13 перемещается вверх, полюсы магнитного корпуса / проходят через сквозные окна плиты и упираются в груз, осуществляя его захват за счет магнитных сил притяжения. Ползун 6 опускается внутрь основания 5. При этом
упор 9 поворачивает звездочку 8.
При подъеме устройства с грузом ползун 6 движется вверх, нижней кромкой своего окна упирается в зуб звездочки 8 и заклинивает ее. После этого груз опускают на площадку. Ползун 6 перемещается внутрь основания 5 и своим упором 9 вновь поворачивает звездочку 8 у верхней кромки своего окна, упирается в нее. При последующем подъеме происходит автоматическое освобождение магнитного корпуса от груза. Ползун 8 перемещается вверх и
нижней кромкой своего окна вновь поворачивает звездочку 8 в положение, не мешающее дальнейшему подъему ползуна вверх. Через тяги 4 усилие подъема передается на отжимные рычаги 2, которые, поворачиваясь, через свои плечи передают усилия на плиту 13, таким образом, отрывая магнитный корпус / от груза.
Предмет изобретения
Грузоподъемное устройство, содержаш,ее магнитный корпус С рычагами для отжатия его от
груза, обличающееся тем, что, с целью автоматизации процесса освобождения магнитного корпуса от груза, одни концы отжимных рычагов шарнирно соединены с корпусом посредством осей, а другие через тяги - с четырехтактным механизмом фиксации рычагов от поворота, причем устройство снабжено подвижной в вертикальной плоскости плитой, подвешенной на кронштейнах к осям корпуса, с которой взаимодействуют при освобождении устройства от груза отжимные рычаги.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический магнитный захват | 1989 |
|
SU1675184A1 |
| Автоматический магнитный захват | 1987 |
|
SU1504196A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| Грузозахватное устройство | 1989 |
|
SU1712301A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |
| Грузозахватное устройство | 1975 |
|
SU564246A1 |
| Устройство для вырубки заготовок из листовых материалов | 1977 |
|
SU704814A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Автоматический захват для грузов с фигурной головкой | 1988 |
|
SU1625808A1 |
-73
