Изобретение относится к транспортным системам специального технологического оборудования, в частности к конструкции транспортного манипулятора, предназначенного для перемещения заготовок в зону с повышенной температурой, и может быть использовано в гибких производственных модулях для термообработки плат тонкопленочных микросборок.
Целью изобретения является расширение технологических возможностей и повышение производительности.
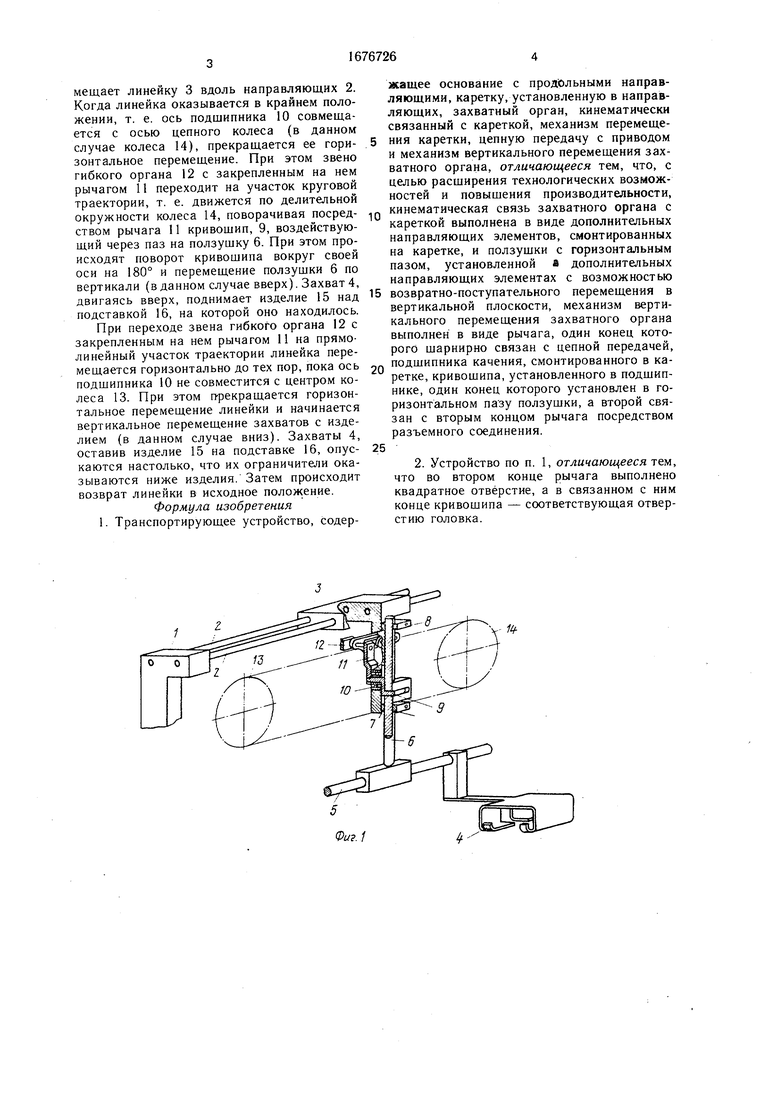
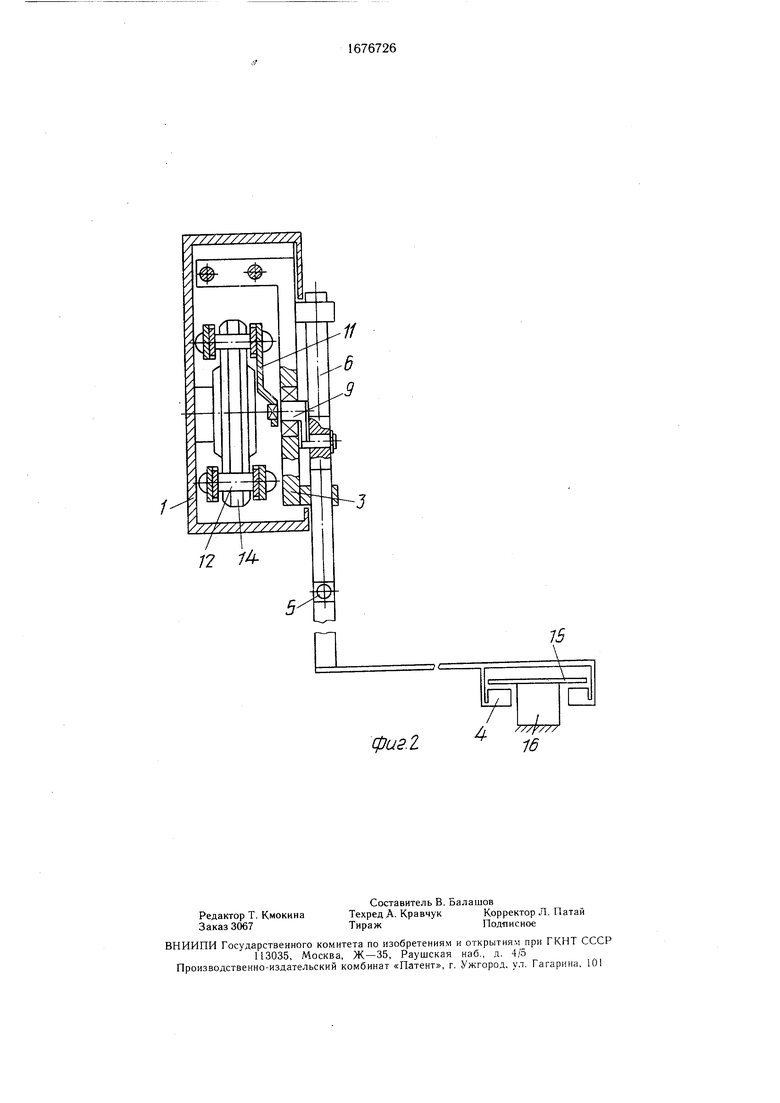
На фиг. 1 представлено транспортирующее устройство, аксонометрия; на фиг. 2 - то же, продольное сечение.
Транспортирующее устройство содержит корпус 1 с закрепленными на нем направляющими 2, на которых установлена линейка 3 с захватами 4, укрепленными на штанге 5..Штанга 5 закреплена в ползуш- ке 6, установленной в вертикальных направляющих 7. 8, закрепленных на линейке 3, и посредством горизонтального паза соединена с шейкой кривошипа 9, который установлен з подшипнике 10 и связан рычагом 1 1 с одним из звеньев гибкого органа 12, закрепленного на колесах 13, 4 При этом расстояние от оси подшипника с установленным в нем кривошипом 9 до оси звена гибкого элемента 12, на котором закреплен рычаг 11, равно радиусу окружности колес 13, 14. Таким образом, центр подшипника 12 всегда находится на линии, связывающей центры колес 13, 14. Подложка 15 установлена на подставке 16.
Устройство работает следующим образом. В исходном положении линейка расположена посередине между колесами 13, 14.
При вращении колеса 14 (например, по часовой стрелке) приводится в движение гиб- кий орган 12, который за рычаг 11 пере05 О О
мещает линейку 3 вдоль направляющих 2. Когда линейка оказывается в крайнем положении, т. е. ось подшипника 10 совмещается с осью цепного колеса (в данном случае колеса 14), прекращается ее горизонтальное перемещение. При этом звено гибкого органа 12 с закрепленным на нем рычагом 11 переходит на участок круговой траектории, т. е. движется по делительной окружности колеса 14, поворачивая посредством рычага 11 кривошип, 9, воздействующий через паз на ползушку 6. При этом происходят поворот кривошипа вокруг своей оси на 180° и перемещение ползушки 6 по вертикали (в данном случае вверх). Захват 4, двигаясь вверх, поднимает изделие 15 над подставкой 16, на которой оно находилось.
При переходе звена гибкого органа 12 с закрепленным на нем рычагом 11 на прямолинейный участок траектории линейка перемещается горизонтально до тех пор, пока ось подшипника 10 не совместится с центром колеса 13. При этом прекращается горизонтальное перемещение линейки и начинается вертикальное перемещение захватов с изделием (в данном случае вниз). Захваты 4, оставив изделие 15 на подставке 16, опускаются настолько, что их ограничители оказываются ниже изделия Затем происходит возврат линейки в исходное положение. Формула изобретения
1. Транспортирующее устройство, содержащее основание с продольными направляющими, каретку, установленную в направляющих, захватный орган, кинематически связанный с кареткой, механизм перемещения каретки, цепную передачу с приводом и механизм вертикального перемещения захватного органа, отличающееся тем, что, с целью расширения технологических возможностей и повышения производительности, кинематическая связь захватного органа с кареткой выполнена в виде дополнительных направляющих элементов, смонтированных на каретке, и ползушки с горизонтальным пазом, установленной а дополнительных направляющих элементах с возможностью
возвратно-поступательного перемещения в вертикальной плоскости, механизм вертикального перемещения захватного органа выполнен в виде рычага, один конец которого шарнирно связан с цепной передачей,
подшипника качения, смонтированного в каретке, кривошипа, установленного в подшипнике, один конец которого установлен в горизонтальном пазу ползушки, а второй связан с вторым концом рычага посредством разъемного соединения.
5
2. Устройство по п. 1, отличающееся тем, что во втором конце рычага выполнено квадратное отверстие, а в связанном с ним конце кривошипа - соответствующая отверстию головка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Перекладыватель заготовок к прессу | 1979 |
|
SU863427A1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее в рабочую зону пресса | 1982 |
|
SU1058686A1 |
| Устройство для накопления и поштучной выдачи длинномерных цилиндрических изделий | 1984 |
|
SU1286482A1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ ДЛЯ ШТАМПОВКИ КРУПНОГАБАРИТНЫХ ДЕТАЛЕЙ | 1992 |
|
RU2041001C1 |
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ ИЗДЕЛИЙ ИЗ БЕТОННЫХ СМЕСЕЙ | 1992 |
|
RU2012497C1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Механизм переноса заготовок между позициями матриц | 1980 |
|
SU1006027A1 |
| Устройство для отделения от стопы плоской заготовки и подачи ее в пресс | 1984 |
|
SU1319980A1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
Изобретение относится к транспортным системам специального технологического оборудования, в частности к конструкции транспортного манипулятора, предназначенного для перемещения заготовок в зону с повышенной температурой, и может быть использовано в гибких производственных модулях для термообработки плат тонкопленочных микросборок. Цель изобретения - расширение технологических возможностей и повышение производительности. При вращении колеса 14 приводится в движение гибкий орган 12, который посредством рычага 11 перемещает линейку 3 вдоль направляющих 2. Когда линейка оказывается в крайнем положении, прекращается ее горизонтальное перемещение. При этом звено гибкого органа 12 с закрепленным на нем рычагом 11 переходит на участок круговой траектории Происходят поворот кривошипа вокруг своей осп и перемещение ползуш- ки 6 по вертикали. Захват 4. двигаясь вверх, поджимает изделие под подставкой и перемещает ее в горизонтальном направлении. 1 ... п. ф-.ibi, 2 ил. ю
Фиг 1
П
Физ.г
| Устройство для удаления деталей | 1977 |
|
SU645737A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
