00 СП
СП to
со
Изобретение относится к электротехнике и может быть использовано в радиотехнике и нриборостроении для управления следящим электроприводом.
Цель изобретения - увеличение быстродействия.
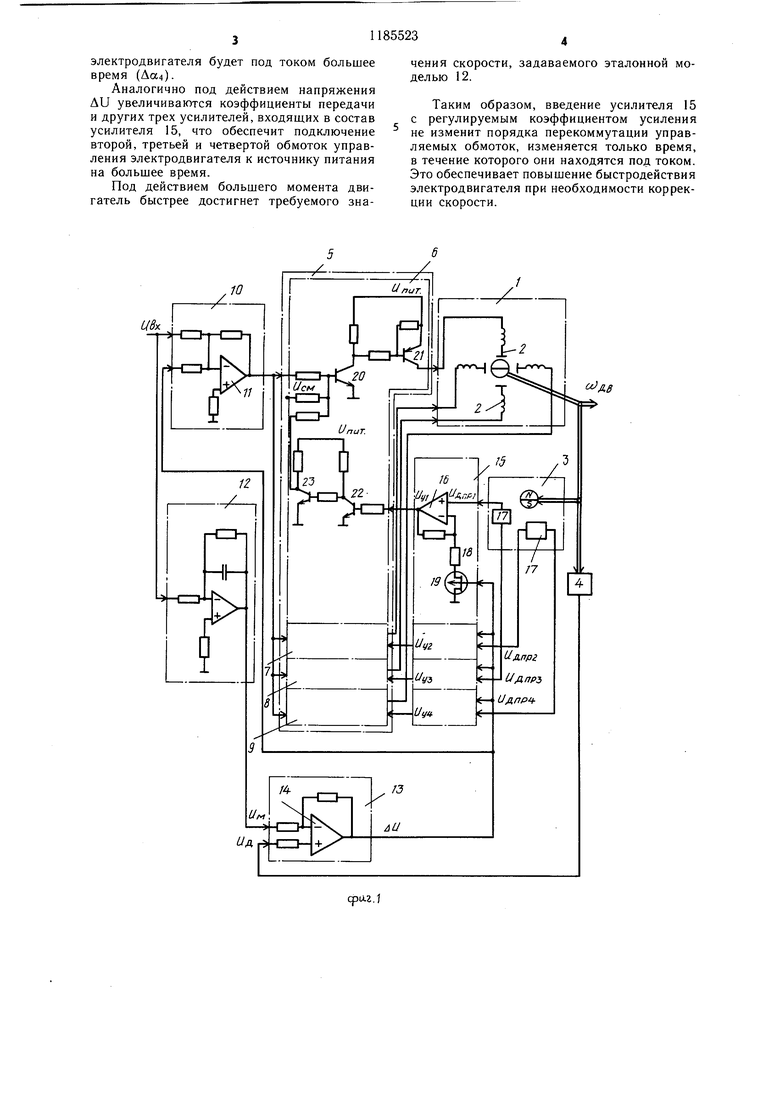
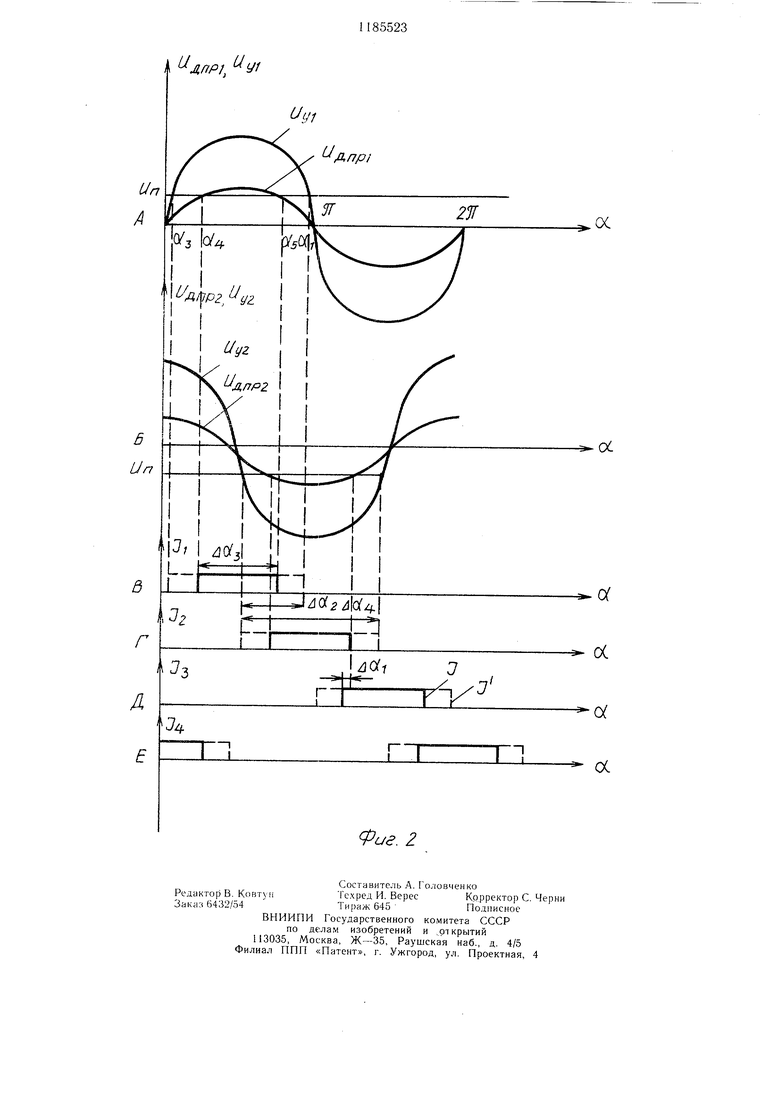
На фиг. 1 приведена принципиальная электрическая схема вентильного электропривода; на фиг. 2 - временные диаграммы, поясняющие работу электропривода.
Вентильный электропривод содержит синхронный электродвигатель 1 с обмотками управления 2, на валу которого установлены датчик 3 положения ротора синхронного электродвигателя и датчик 4 частоты вращения ротора электродвигателя. Обмотки управления 2 синхронного электродвигателя подключены к выходу ком.мутатора 5, выполненного на транзисторных усилителях 6-9, Si ходы которых объединены и образуют вход коммутатора, подключенного к выходу первого блока сравнения 10, выполненного на операционном усилителе 11. Первый вход блока сравнения 10 соединен с входом эта;1онной модели 12 задатчика частоты вращения, выход которой подключен к первому входу второго блока сравнения 13, выполненного также на операционном усилителе 14. Второй вход блока сравнения 13 подключен к выходу датчика частоты 4, а выход - к второму входу первого блока сравнения 10. В электропривод введен усилитель 15 с регулируемым коэффициентом усиления, выполненный на операционных усилителях 16, прямые входы которых образуют информационный вход усилителя 15, подключенНЕ 1Й к чувствительным элементам 17 датчика 3 положения. К инверсным входам операционных усилителей через резистор 18 подключен полностью управляемые ключи, выполненные в виде полевого транзистора 19. Затворы полевыхтранзисторов 19 объединены и образуют управляющий вход усилителя 15, подключенный к выходу второго блока сравнения 13. Выход усилителя 15 подключен к управляющему входу коммутатора 5.
Электропривод работает следующи.м образом.
В исходном состоянии транзистор 20 усилителя б закрыт напряжением смещения Ьси . Напряжение Upc недостаточно, чтобы открыть транзистор 20. Соответственно закрыт и транзистор 21, первая обмотка управления электродвигателя к источнику питания Опит не подключена. Этот момент соответствует положению а 0 и I| О (фиг. 2).
При повороте ротора электродвигателя (постоянного магнита) на угол «4 на одном из чувствительных элементов (датчика Холла) датчика положения ротора появится напряжение Ыолр , которое поступает на вход усилителя 15.
Рассмотрим случай, когда ди О и соответственно коэффициент передачи усилителя 15 Ку 1 и AUi -
Сигнал, пропорциональный напряжению Uyi, подается на второй вход усилителя 6 коммутатора 5, открывая транзистор 22 и закрывая транзистор 23. При этом напряжение с коллектора транзистора 23 компенсирует UtM. Под действием UBC транзистор 20 открывается. Соответственно открывается и транзистор 21. По первой обмотке управления, подключенной к усилителю 6, протекает ток Ii (фиг. 2).
При дальнейщем повороте ротора до угла «5 в указанной обмотке управления протекает ток Ii, величина которого определяется
напряжением U&x. При а Жб напряжение на чувствительном элементе датчика положения уменьщается, соответственно закрывается транзистор 22, открывается транзистор 23. Под действием Шм транзисторы 20
Q и 21 закрываются, и ток I| становится равным нулю.
Таким образом, ток в первой обмотке управления протекает в течение времени даз (фиг. 2), когда напряжение Uyj превыщает пороговое напряжение транзистора 22.
Обмотки управления работают с перекрытием. В момент as напряжение U превысит пороговое напряжение UH транзисторов в усилителе 7 коммутатора 5, что обеспечит протекание тока Ь по второй обмотке управления синхронного электродвигателя.
Аналогично в соответствующие моменты времени по мере поворота ротора будут включены третья и четвертая обмотки управления электродвигателя.
Рассмотрим работу устройства при .
Под действием напряжения U|j( электродвигатель вращается со скоростью Ucs. Эта скорость измеряется датчиком 4, напряжение с выхода которого Up подается на вход блока сравнения 13. Сюда же поступает
сигнал, пропорциональный напряжению УЛ с выхода эталонной модели 12, выполненной также на операционном усилителе. Коэффициент передачи модели Кя , постоянная времени Т,, ReCi.
Если скорость ротора электродвигателя соответствует требуемой, т. е. UK Up, то
AU 0.
Если Up ; UM, то AU 0. На второй вход блока сравнения 10 поступает сигнал
AU, увеличивая напряжение Use и соответственно ток I электродвигателя.
Напряжение AU подается также на второй вход усилителя 15. Транзистор 19 открывается, коэффициент передачи усилителя 15 увеличивается, возрастает Uyi. В этом случае (фиг. 2) напряжение Uy превыщает пороговое напряжение Un транзистора 22 коммутатора 5 от угла аз до угла «g. Следовательно, первая обмотка управления
электродвигателя будет под током большее время (Аа4).
Аналогично под действием напряжения ли увеличиваются коэффициенты передачи и других трех усилителей, входящих в состав усилителя 15, что обеспечит подключение второй, третьей и четвертой обмоток управления электродвигателя к источнику питания на большее время.
Под действием большего момента двигатель быстрее достигнет требуемого значения скорости, задаваемого эталонной моделью 12.
Таким образом, введение усилителя 15 с регулируемым коэффициентом усиления не изменит порядка перекоммутации управляемых обмоток, изменяется только время, в течение которого они находятся под током. Это обеспечивает повышение быстродействия электродвигателя при необходимости коррекции скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный вентильный электропривод | 1987 |
|
SU1679597A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1046864A1 |
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1153381A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Вентильный электродвигатель | 1990 |
|
SU1750016A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1297186A1 |
| Электропривод переменного тока | 1986 |
|
SU1336189A1 |
| Вентильный электродвигатель | 1989 |
|
SU1767638A1 |
| Многодвигательный электропривод | 1986 |
|
SU1376206A1 |
ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД, содержащий синхронный электродвигатель, датчик положения ротора, датчик частоты вращения ротора синхронного электродвигателя, установленные на его валу, коммутатор, выход которого подключен к обмоткам управления синхронного электродвигателя, два блока сравнения и эталонную модель задатчика частоты вращения, вход которой соединен с первым входом первого блока сравнения, а выход - с первым входом второго блока сравнения, вторым входом подключенного к выходу датчика частоты вращения ротора синхронного электродвигателя, а выход второго блока сравнения подключен к второму входу первого блока сравнения, выходом соединенного с входом коммутатора, отличающийся тем, что, с целью повыщения быстродействия, в него введен усилитель с регулируемым коэффициентом усиления, управляющий вход которого соединен с выходом датчика положения ротора синхронного электродвигателя, информационный вход - с выходом второго блока сравнения, а выход указанного усилителя подключен к управляющему входу комму- СЛ татора.
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Панов В | |||
| И., Семенко М | |||
| Н., Черкашина Ф | |||
| Л | |||
| Применение самонастройки для стабилизации динамических параметров электродвигателей в следящих системах | |||
| Сб | |||
| «Теория и применение самонастраивающихся систем, Киев,: Техника, 1968, с | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| I. | |||
