Изобретение относится к авиационной технике, в частности к устройствам для буксировки тел.
Цель - расширение эксплуатационных характеристик устройства за счет обеспечения в одном полете заданного диапазона изменения углового положения лопастей буксируемого тела.
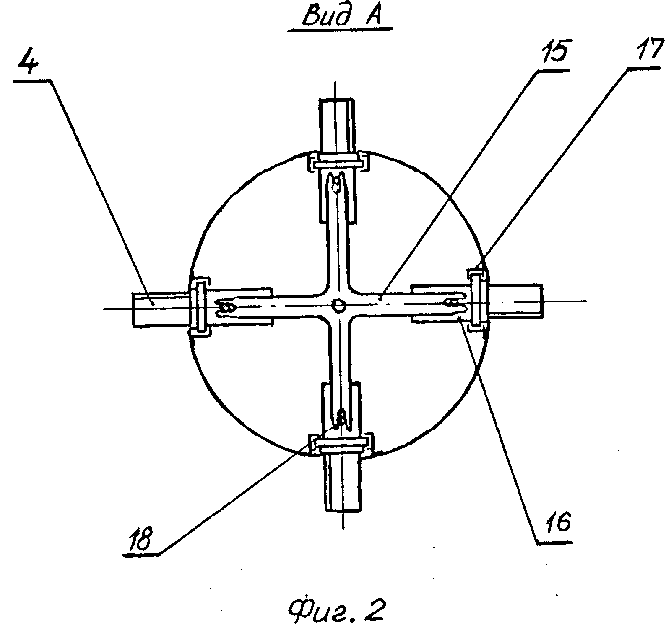
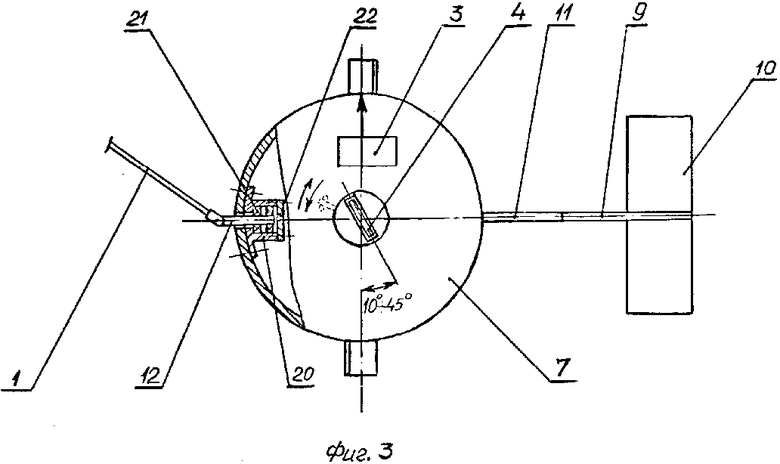
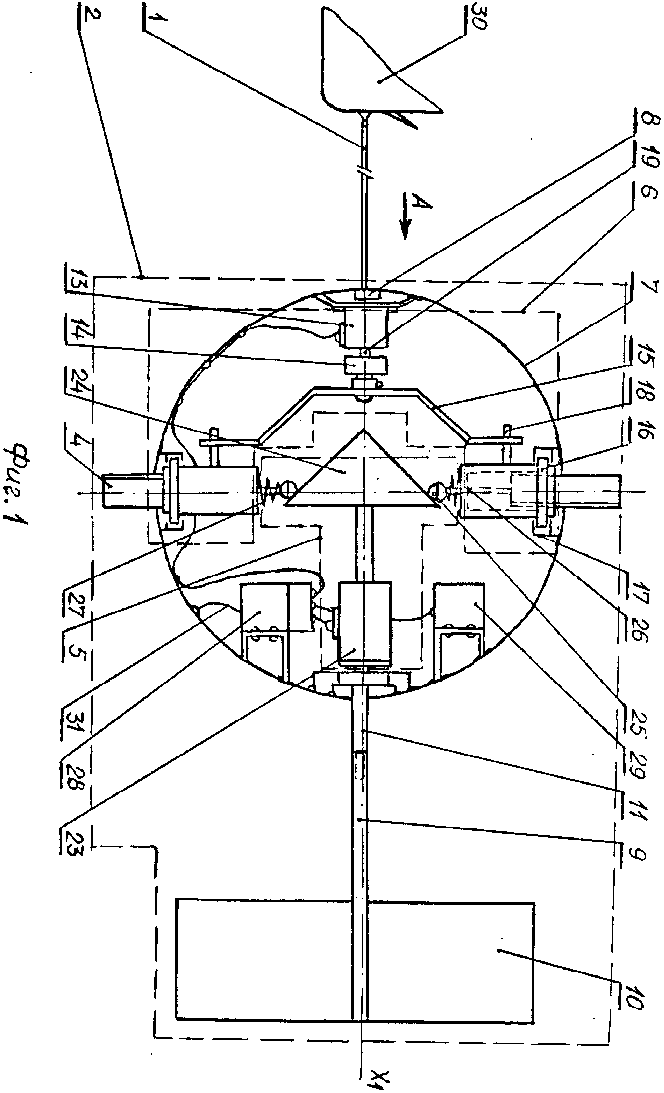
На фиг. 1 изображен общий вид устройства; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - общий вид устройства с отклоненными лопастями.
Устройство для буксировки тел содержит гибкую связь 1, соединенную с буксируемым телом 2, и средство 3 изменения его геометрической формы, выполненное в виде лопастей 4, расположенных в поперечной плоскости внутри буксируемого тела 2 и связанных с механизмом 5 их выдвижения.
Устройство содержит механизм 6 изменения углового положения лопастей, размещенный внутри буксируемого тела 2, выполненного в виде шара 7, внутри которого закреплен вертлюг 8, соединенный с гибкой связью 1, и вал 9 с оперением 10 на конце. Вал 9 подвижно установлен на конце стержня 11, закрепленного в буксируемом теле 2. При этом ось 12 вращения вертлюга 8 и ось вала 9 совпадают с продольной осью X1 буксируемого тела, а каждая лопасть 4 кинематически связана с механизмом 6 изменения углового положения лопастей 4.
Механизм 6 изменения углового положения лопастей содержит шаговый двигатель 13, планетарный редуктор 14, мальтийский крест 15, стаканы 16 цилиндрической формы с выступами, направляющие 17 и пальцы 18, при этом направляющие 17 закреплены в поперечной плоскости шара 7, а лопасти 4 закреплены в стаканах 16. На боковых поверхностях стаканов 16 закреплены пальцы 18, связанные с пазами мальтийского креста 15, выступы стаканов 16 размещены в направляющих 17, а вал 19 шагового двигателя 13 через планетарный редуктор 14 связан с мальтийским крестом 15.
Вертлюг 8 выполнен в виде корпуса 20, связанного с осью 12 посредством, например, радиально-упорных подшипников 21 и крышки 22.
Механизм 5 выдвижения лопастей выполнен в виде привода 23, закрепленного внутри буксируемого тела 2 и связанного посредством клиновидного конуса 24, шариков 25, стержней 26 с лопастями 4. Вдоль стержней 26 расположены пружины 27, одними концами закрепленные на стаканах 16, а другими - на стержнях 26.
Лопасти 4 выполнены в виде пластин, которые могут изменять свое положение в диапазоне углов от 10 до 45о по отношению к вектору набегающего воздушного потока.
Вал 9, оперение 10 и стержень 11 могут быть выполнены из диэлектрического материала.
Шар 7 выполнен из металла. Внутри шара 7 размещен приемник 28 и источник питания 29, соединенный с ним.
Привод 23 может быть выполнен в виде электромеханизма с выходным штоком. Управление электромеханизмом привода 23 и механизмом 6 изменения углового положения лопастей может осуществляться, например, по радиоканалам, с буксировщика 30 и с помощью приемной антенны, в качестве которой может быть использован шар 7.
Шар 7 посредством кабеля 31 может быть связан с приемником 28, одновременно осуществляющим функцию управления электромеханизмом привода 23.
Гибкая связь 1 может быть выполнена в виде канала из диэлектрика.
Устройство работает следующим образом.
В исходном положении буксируется конструкция с убранными внутрь шара 7 лопастями 4. При подаче сигнала по радиоканалу на механизм 5 выдвижения лопастей 4 происходит их выдвижение в поток воздуха. Под действием набегающего воздушного потока воздуха шар 7 начинает вращаться вокруг оси вертлюга 8 и вала 9 с расчетной скоростью, имитируя работу двигательной установки. Оперение 10 обеспечивает стабилизацию буксируемого тела 2 в потоке.
Для управления угловым положением лопастей 4 по радиоканалу подается сигнал на включение шагового двигателя 13, шаговый двигатель 13 через планетарный редуктор 14, мальтийский крест 15 поворачивает на заданный угол лопасти 4 по отношению к оси буксируемого тела 2 и вектору набегающего воздушного потока. Величина угла отклонения лопастей 4 определяется длительностью сигнала, подаваемого на шаговый двигатель 13.
Таким образом, в одном полете задается требуемая величина отклонения лопастей при сохранении отражающей площади для электромагнитной энергии. Это дает возможность расширить эксплуатационные характеристики устройства за счет изменения углового положения лопастей буксируемого тела и сохранения неизменной отражающей площади для электромагнитной энергии при постоянной ее длине волны от шара, являющегося основной поверхностью буксируемого тела, что позволит изменять амплитуду отраженной электромагнитной энергии в одном полете. (56) Авторское свидетельство СССР N 1723742, кл. B 64 D 3/00, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой и устройство для его осуществления | 1989 |
|
SU1781133A1 |
| БУКСИРУЕМАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1989 |
|
SU1746632A1 |
| Буксируемая плоская система | 1989 |
|
SU1835373A1 |
| УСТРОЙСТВО ДЛЯ БУКСИРОВКИ ГИБКОЙ СИСТЕМЫ | 1989 |
|
SU1753669A1 |
| Буксируемая мишень для имитации летательных аппаратов | 1990 |
|
SU1837036A1 |
| Устройство для буксировки гибкой системы | 1989 |
|
SU1663888A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ БУКСИРУЕМОГО ТЕЛА | 1992 |
|
RU2006429C1 |
| Способ аэропересцепки буксируемого тела с одного летательного аппарата на другой и устройство для его осуществления | 1989 |
|
SU1684165A1 |
| Буксируемая плоская система | 1989 |
|
SU1835372A1 |
| БУКСИРУЕМОЕ АНТЕННОЕ УСТРОЙСТВО | 1989 |
|
SU1762503A1 |
Изобретение относится к авиационной технике, в частности к устройствам для буксировки тел. Цель изобретения - расширение эксплуатационных характеристик устройства за счет обеспечения в одном полете заданного диапазона углового положения лопастей. Устройство снабжено механизмом изменения углового положения лопастей, содержащим шаговый двигатель, который через планетарный редуктор и мальтийский крест поворачивает лопасти на заданный угол по отношению к оси буксируемого тела, что позволяет изменять в одном полете амплитуду отраженной электромагнитной энергии при постоянной основной поверхности буксируемого тела. 1 з. п. ф-лы, 3 ил.
