Изобретение относится к подъемно- транспортному оборудованию, в частности к захватам для изделий xpys лого поперечного сечения.
Цель изобретения -- расширение диапазона типоразмеров захватываемых грузов
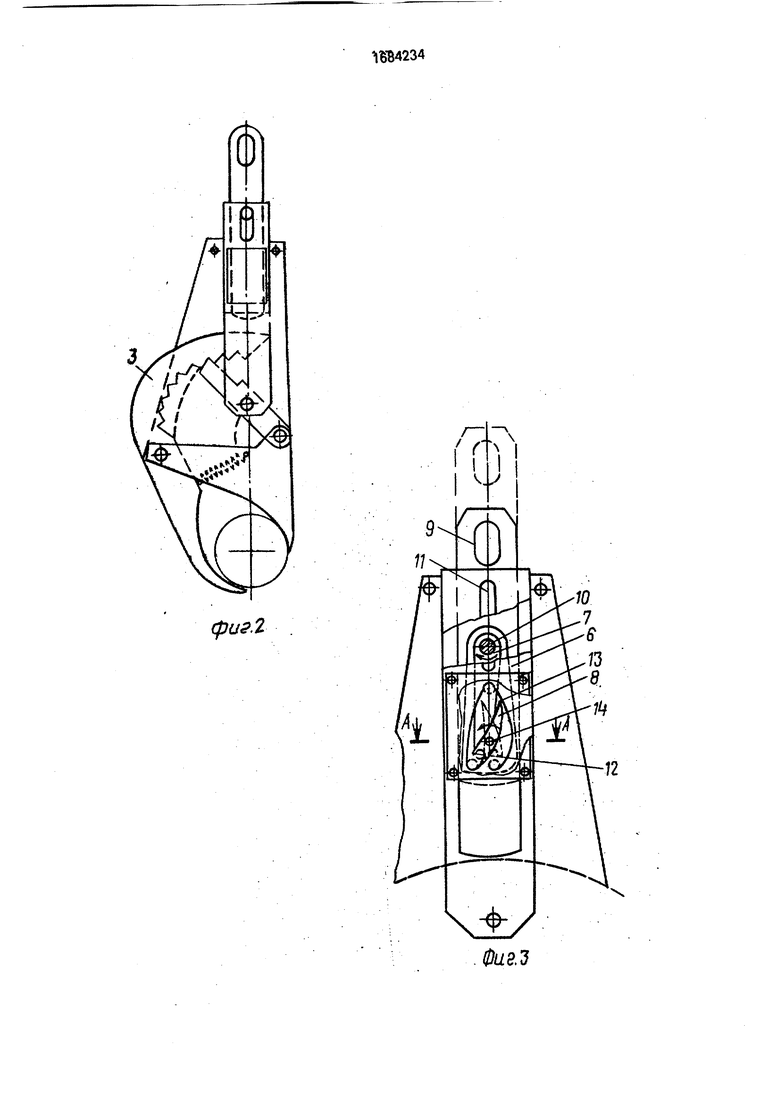
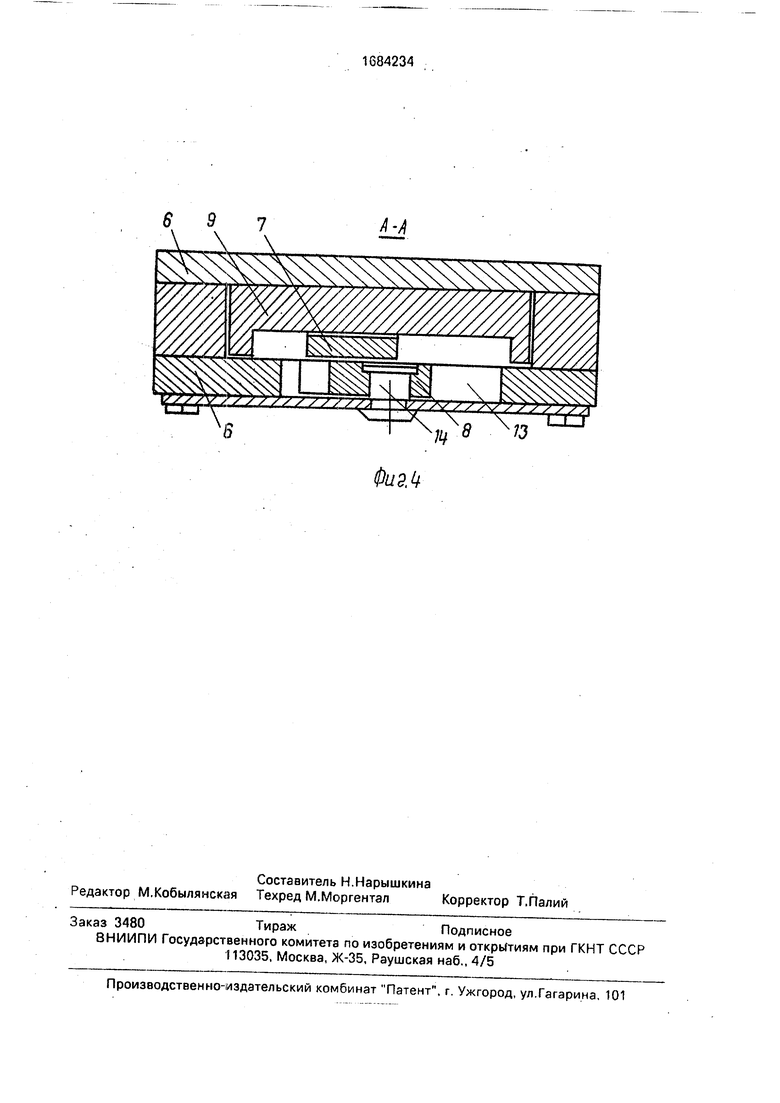
На фиг.1 изображен захват в положении наведения на изделия разных диаметров, общий вид; на фиг.2 - захват при подъеме изделий средних диаметров, общий вид; на фиг.З - схема работы механизма фиксации положения двуплечих рычагов; на фиг,4 -- разрез А-А на фиг.З.
Захват содержит рычаг 1, шарнирно соединенный с траверсой 2, рычаг 3, шарнирно закрепленный на рычаге 1 и подпружиненный относительно него пружиной 4, Верхнее плечо рычагаЗ выполнено изогнутым и имеет внутреннюю зубчатую поверхность, взаимодействующую с траверсой 2. В центральной чг-сти траверсы 2 шарнирно закреплены щеки 5, между которыми расположено изожугое плечо рычага 3 и свободно установлена подвеска 6.
В подвеске 6 выполнен механизм фиксации положения двуплечих рычагов, который состоит из маятника 7 и собачки 8. Маятник 7 шарнирно закреплен на подвесном органе 9 при помощи оси 10, установленной в пазу 11 с возможностью возвратно-поступательного перемещения вдоль него. Маятник 7 подпружинен относительно подвесного органа 9 для вращения по часовой стрелке и снабжен выступом 12 на конце. В щеках 5 ниже первого паза 11 выполнен фигурный паз 13 сердцевидной формы, в котором на оси 14 установлена собачка 8, подпружиненная относительно щек 5 для вращения против часовой стрелки. Нижний конец собачки 8 аыполен в виде вилки, а верхний взаимодействует с боковыми сторонами фигурного паза 13.
Захват работает следующим образом,
Iэтап. В положении наведения на груз рычаги 1 и 3 разведены на максимально возможный угол. Щеки 5 нижней частью прижаты к рычагу 1, з верхний конец рычага 3 прижат сверху подвесным органом 9. Выступ 12 маятника 7 введен в вилку собачки 8.
IIэтап. При опускании захвата на изделие подвесной орган 9 с маятником 7 перемещается на короткий ход в щеках 5 вниз. Выступ 12 при стремлении маятника 7 повернуться по часовой стрелке выходит из зацепления с собачкой 8 и упирается в нижнюю левую точку фигурного паза 13. Собачка 8 под действием пружины поворачивается против часовой стрелки.
IIIэтап. При последующем перемещении подвесного органа 9 с маятником 7 вверх выступ 12 скользит вдоль левой стенки фигурного паза 13, отжимает собачку 8 и доходит до верхней точки фигурного паза 13. Одновременно ось 10 маятника 7 перемещается в крайнее верхнее положение в пазу 11, Рычаг 3 освобождается и под действием пруокины 4 поворачивается против часовой
стрелки, подхватывая груз ниже центра тяжести и поджимая к грузу рычаг 3.
При дальнейшем подъеме подвесного органа 9 начинают подниматься щеки 5 и траверса 2. Последняя поднимается до упора в один из зубьев изогнутого плеча рычага 3 м при дальнейшем подъеме препятствует размыканию рычагов 1 и 3.
IVэтап. При опускании изделия на основание щеки 5 и траверса 2 опускаются до
упора. Подвесной орган 9, перемещаясь в щеках 5, вместе с маятником 7 нажимает на верхний конец рычага 3 и рычаги 1 и 3 разводятся. При этом ходе выступ 12 скользит по поверхности собачки 8 и доходит до правой нижней точки фигурного паза 13. Последующий подъем подвесного органа 9 с маятником 7 возвращает механизм фиксации в исходное положение
Формула изобретения
Захват для изделий круглого поперечного сечения, содержащий шарнирно соединенные друг с другом двуплечие рычаги с криволинейными рабочими поверхностями, траверсу, горизонтальную ось, закрепленную на одном из ее концов, механизм фиксации положения двуплечих рычагов и подвесной орган для крюка подъемного устройства, отличающийся тем, что, с целью расширения диапазона типоразмеров захватываемых грузов, верхнее плечо одного из двуплечих рычагов выполнено изогнутым выпуклостью вверх с зубчатой внутренней поверхностью для взаимодействия с вторым концом траверсы, горизонтальная ось которой закреплена в центральной верхней части одного плеча второго рычага, выполненного удлиненным с возможностью контакта верхней поверхности с нижней поверхностью траверсы, механизм фиксации положения двуплечих рычагов включает шарнирно закрепленные нижними концами в центральной части траверсы и расположенные вертикально щеки, между которыми расположено изогнутое
верхнее плечо первого рычага и подвесной орган, установленный с возможностью ограниченного перемещения и фиксированного контакта с наружной поверхностью изогнутого верхнего плеча рычага.
х/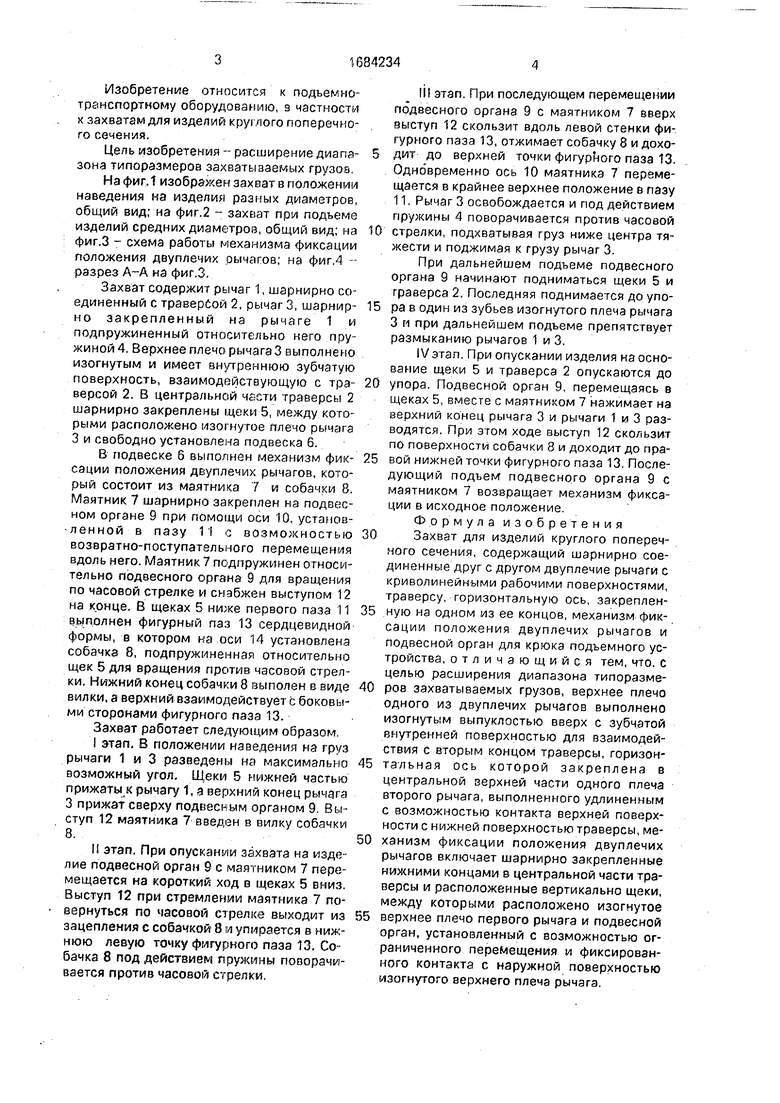
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1991 |
|
SU1789493A1 |
| Устройство для захвата и сброса груза со строповочным элементом | 1988 |
|
SU1625807A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| Захватное устройство | 1988 |
|
SU1625685A2 |
| Грузозахватное устройство | 1985 |
|
SU1248933A1 |
| Захватное устройство | 1989 |
|
SU1615134A1 |
| Захватное устройство для грузов с цапфами | 1985 |
|
SU1316972A1 |
| Магнитный захват | 1979 |
|
SU792793A1 |
| Устройство для открывания бортов форм | 1985 |
|
SU1694380A1 |
| УСТРОЙСТВО для ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ | 1968 |
|
SU220456A1 |
Изобретение относится к подъемно- транспортному оборудованию, в частности к захватам для изделий круглого поперечного сечения. Цель изобретения - расширение диапазона типоразмеров захватываемых грузов. Захват для изделий круглого поперечного сечения содержит шарнирно соединенные рычаги 1 и 3. Верхнее плечо рычага 3 выполнено изогнутым с зубчатой внутренней поверхностью для взаимодействия с траверсой 2, шарнирно закрепленной на рычаге 1, что позволяет захватывать изделие разного диаметра и фиксировать рычаги в закрытом положении. 4 ил. сл о 00 N Ю 00 4 cpuai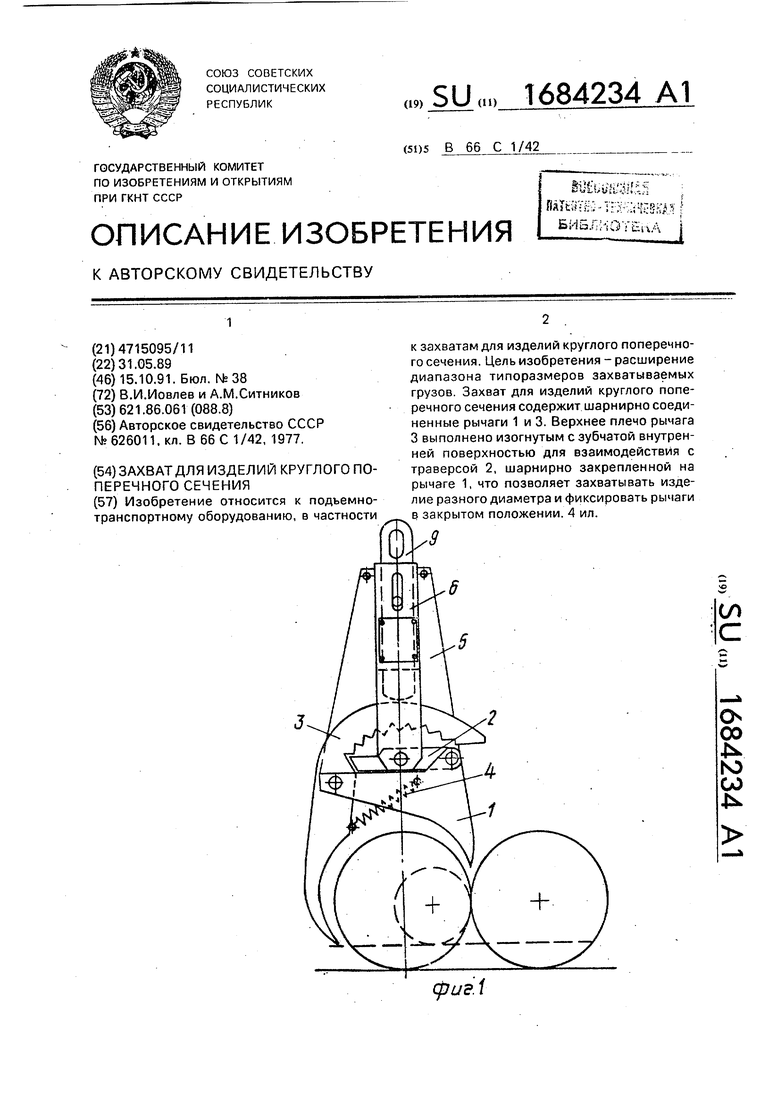
testae
69j
Л V
В
А-А
$И9.Ь
| Автоматический захват для труб | 1977 |
|
SU626011A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
