Изобретение относится к кузнечно- штамповочному оборудованию и может быть использовано для переноса обрабатываемых заготовок по позициям многопозиционного автомата для объемной штамповки.
Цель изобретения - расширение технологически возможностей устройства.
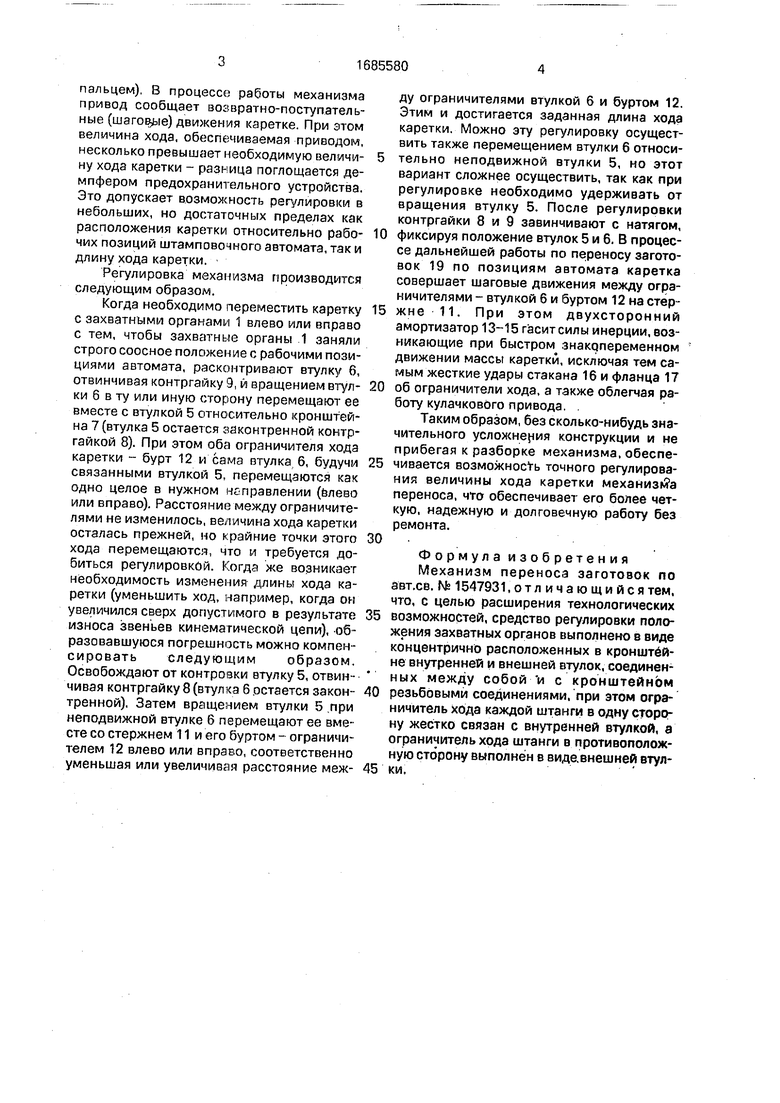
На фиг.1 изображена кинематическая схема механизма, общий вид; на фиг.2 - разрез А-А на фиг.1.
Механизм переноса содержит захватные органы 1, смонтированные на каретке, выполненной в виде двух, связанных траверсой 2, параллельных штанг 3. Каретка связана с приводом 4, например кулачковым. Каждая из штанг 3 имеет средство регулировки положения захватных органов. Это средство выполнено в виде двух резьбовых втулок 5 и 6. Втулка 5, имеющая внешнюю резьбу, концентрично расположена в резьбовом отверстии втулки 6 с возможностью взаимного осевого перемещения по резьбе. Втулка 6 наружной резьбой также с возможностью осевого перемещения ввинчена в кронштейн 7 - неподвижное основание механизма. В рабочем лоложении втулки 5 и 6 законтрены от произвольного поворота контргайками 8 и 9 соответственно. В отверстии втулки 5 закреплен с помощью га-йки 10 стержень 11, заканчивающийся буртом 12. В полости штанги 3 размещен двусторонний амортизатор, представляющий собой две свободно посаженные на стержень 11 втулки 13 и 14 в закраинами, нагруженные в противоположные стороны пружиной 15. Втулка 14 удерживается за закраины стаканом 16, свободный торец которого является упором, взаимодействующим с ограничителем хода о буртом 12 в крайнем правом положении каретки. Втулка 13 удерживается фланцем 17, кольцевой выступ которого является упором, взаимодействующим с левым ограничителем хода - торцом втулки 6 в крайнем левом положении каретки. Стакан 16 и фланец 17 жестко скреплены со штангой 3 болтами 18. Механизм снабжен предохранительным устройством от перегрузки известной конструкции (со срезным
&
Ј
О 00 СЛ
сл
00
о
ю
пальцем), В процессе работы механизма привод сообщает возвратно-поступательные (шаговые) движения каретке. При этом величина хода, обеспечиваемая приводом, несколько превышает необходимую величину хода каретки - разница поглощается демпфером предохранительного устройства. Это допускает возможность регулировки в небольших, но достаточных пределах как расположения каретки относительно рабочих позиций штамповочного автомата, так и длину хода каретки.
Регулировка механизма производится следующим образом.
Когда необходимо переместить каретку с захватными органами 1 влево или вправо с тем, чтобы захватные органы 1 заняли строго соосное положение с рабочими позициями автомата, расконгривают втулку 6, отвинчивая контргайку 9, и вращением втулки б в ту или иную сторону перемещают ее вместе с втулкой 5 относительно кронштейна 7 (втулка 5 остается згзконтренной контргайкой 8). При этом оба ограничителя хода каретки - бурт 12 и сама втулка 6, будучи связанными втулкой 5, перемещаются как одно целое в нужном исправлении (влево или вправо). Расстояние между ограничителями не изменилось, величина хода каретки осталась прежней, но крайние точки этого хода перемещаются, что и требуется добиться регулировкой. Когда же возникает необходимость изменения длины хода каретки (уменьшить ход, например, когда он увеличился сверх допустимого в результате износа звеньев кинематической цепи), -образовавшуюся погрешность можно компенсировать следующим образом. Освобождают от контровки втулку 5, отвинчивая контргайку 8(втулка 6.остается законтренной). Затем вращением втулки 5 при неподвижной втулке 6 перемещают ее вместе со стержнем 11 и его буртом - ограничителем 12 влево или вправо, соответственно уменьшая или увеличивая расстояние между ограничителями втулкой 6 и буртом 12. Этим и достигается заданная длина хода каретки. Можно эту регулировку осуществить также перемещением втулки 6 относительно неподвижной втулки 5, но этот вариант сложнее осущесгвить, так как при регулировке необходимо удерживать от вращения втулку 5. После регулировки контргайки 8 и 9 завинчивают с натягом,
фиксируя положение втулок 5 и 6. В процессе дальнейшей работы по переносу заготовок 19 по позициям автомата каретка совершает шаговые движения между ограничителями - втулкой 6 и буртом 12 на стержне 11. При этом двухсторонний амортизатор 13-15 гаситсилы инерции, возникающие при быстром знакопеременном движении массы каретки, исключая тем самым жесткие удары стакана 16 и фланца 17
об ограничители хода, а также облегчая работу кулачкового привода,
Таким образом, без сколько-нибудь значительного усложнения конструкции и не прибегая к разборке механизма, обеспечивается возможность точного регулирования величины хода каретки механизма переноса, что обеспечивает его более четкую, надежную и долговечную работу без ремонта.
Формула изобретения Механизм переноса заготовок по авт.св. № 1547931, от л ича ю щи йсятем, что, с целью расширения технологических
возможностей, средство регулировки положения захватных органов выполнено в виде концентрично расположенных в кронштейне внутренней и внешней втулок, соединен- ных между собой и с кронштейном
резьбовыми соединениями, при этом ограничитель хода каждой штанги в одну сторону жестко связан с внутренней втулкой, а ограничитель хода штанги в противоположную сторону выполнен в виде.внешней втулки.
Фие.4
/ / /
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм переноса заготовок | 1987 |
|
SU1547931A1 |
| Устройство для подачи материала в зону обработки | 1987 |
|
SU1442299A1 |
| Устройство для переноса заготовок | 1980 |
|
SU980916A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕНОСА ЗАГОТОВОК МЕЖДУ ПОЗИЦИЯМИ ШТАМПОВОЧНОГО АВТОМАТА | 1993 |
|
RU2049591C1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| Манипулятор | 1984 |
|
SU1207754A1 |
| МЕХАНИЗМ ПЕРЕНОСА МНОГОПОЗИЦИОННЫХ ХОЛОДНОВЫСАДОЧНЫХ АВТОМАТОВ | 1973 |
|
SU366912A1 |
| Устройство для манипулирования заготовками типа труб | 1974 |
|
SU504597A1 |
| Автомат для сборки трубного пакета радиатора | 1981 |
|
SU996162A1 |
Изобретение относится к обработке металлов давлением, в частности к механизмам для перекоса заготовок. Цель изобретения - расширение технологических возможностей устройства. Механизм переноса заготовок содержит захватные органы, каретку в вида двух штанг, а также устройства для регулирования положения захватных органов. При взаимном перемещении элементов средств регулирования положения захватных органов происходит изменение положения захватов заготовки. 2 ил.
10 8
9 7
А
Л tf к 16
)yffyl .....
5 «
А
/4 J //
а.
У
)yffyl .....
ШШ
а
/2
| Механизм переноса заготовок | 1987 |
|
SU1547931A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
