Фиг.}
Изобретение относится к захватным устройствам промышленных роботов.
Цель изобретения - повышение производительности труда за счет снижения затрат времени на переналадку захватных устройств для работы с различными по форме захватываемыми объектами.
На фиг. 1 изображен предлагаемый схват, общий вид; на фиг. 2 - сечение А-А на фиг. 1.
Схват содержит корпус 1, привод в виде силового цилиндра 2 и систему рычагов 3-5, кинематически связанных со штоком 6 силового цилиндра 2 посредством звена 7. В окнах 8 захватных рычагов 3 смонтированы губки 9, выполненные в виде поворотных элементов, установленных на пальцах 10, имеющих, например, квадратное поперечное сечение. Губки 9 зафиксированы в, рабочем положении подпружиненными фиксирующими элементами, выполненными в виде дисков 11, установленных на пальцах 10 с возможностью осевого перемещения и взаимодействующих с лунками 12 посредством сферических тел 13. Диски 11 поджаты пружинами 14, величина сжатия которых регулируется гайками 15. Пальцы 10 имеют головки 16 под ключ. Во избежание трения между головками 16 и торцовыми поверхностями рычагов 3 установлены опорные шарики 17. Боковая поверхность губок 9 выполнена в виде совокупности различных по форме рабочих профилей, например поперечной призмы 18, продольной призмы 19, лунки 20, плоскости 21, предназначенных для взаимодействия с различными по форме захватываемыми объектами.
Схват работает следующим образом.
Для захватывания объекта схват вводится в рабочую зону, а захватные рычаги 3 располагаются так, что объект находится между губками 9. После срабатывания силового цилиндра 2 усилие передается через шток 6 и звено 7 на рычаги 4 и 5, что приводит к движению рычагов 3 навстречу друг другу. Объект оказывается зажатым между рабочими профилями губок 9. Для переналадки схвата на работу с объектом иной формы необходимо с помощью ключа путем воздействия на головки 16 пальцев 10 провернуть губки 9 в требуемое положение. При этом сферические тела 13 выходят из лунок 12, фиксирующие диски 11 получают осевое отжатие, деформируя пружины 14. Проворот осуществляется до совмещения сферических тел 13 и лунок 12 в нужном положении губок 9.
Формула изобретения
Схват промышленного робота, содержащий корпус и губки, связанные через систему рычагов с силовым цилиндром, отличающийся тем, что, с целью цовышения производительности труда за счет снижения затрат времени на переналадку для работы с объектами различной формы, в захватных рычагах выполнены окна, в которых расположены губки, выполненные в виде поворотных элементов, установленных на пальцах, причем боковая поверхность поворотных элементов представляет собой совокупность различных по форме рабочих профилей, при этом каждая губка снабжена смонтированным на пальце подпружиненным фиксатором.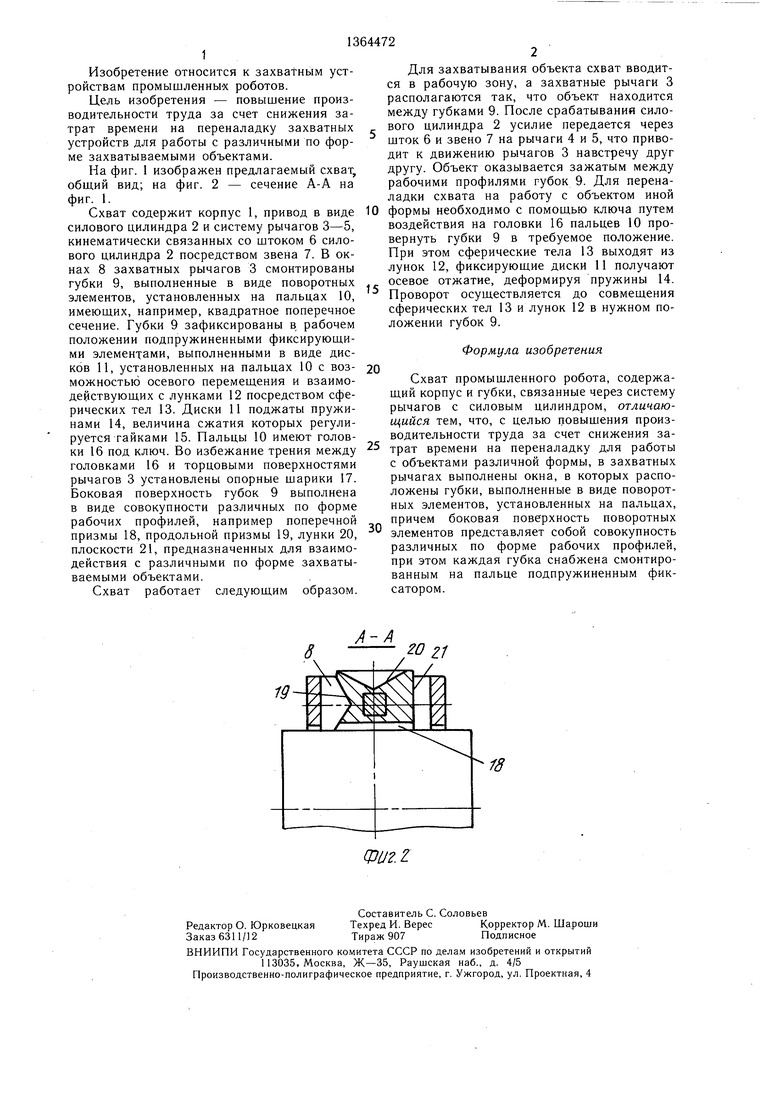
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1983 |
|
SU1117205A1 |
| Схват | 1983 |
|
SU1144878A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Схват промышленного робота | 1985 |
|
SU1284830A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Схват промышленного робота Саблина В.П. | 1982 |
|
SU1060470A1 |
| Схват манипулятора | 1983 |
|
SU1311923A1 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
Изобретение относится к захватным устройствам промышленных роботов. Цель изобретения - увеличение производительности труда за счет уменьшения времени на переналадку для работы с объектами различной формы. Схват имеет корпус 1, силовой цилиндр 2, систему рычагов 3-5, кинематически связанных со штоком 6 цилиндра 2 посредством звена 7, и губки 9, выполненные в виде поворотных элементов, установленньЕх в окнах захватных рычагов 3. Боковая поверхность губок представляет собой совокупность различных по форме профилей. Для переналадки схвата на работу с деталью заданной формы с помощью ключа врашают головки 16 пальцев 10, жестко связанных с губками, при этом губки поворачиваются. Фиксация губок в рабочих положениях осушествляется с помош1ью подпружиненных фиксируюших элементов. 2 ил. ff /,/4 j: I Х О) со 05 4 4 vj ГчЭ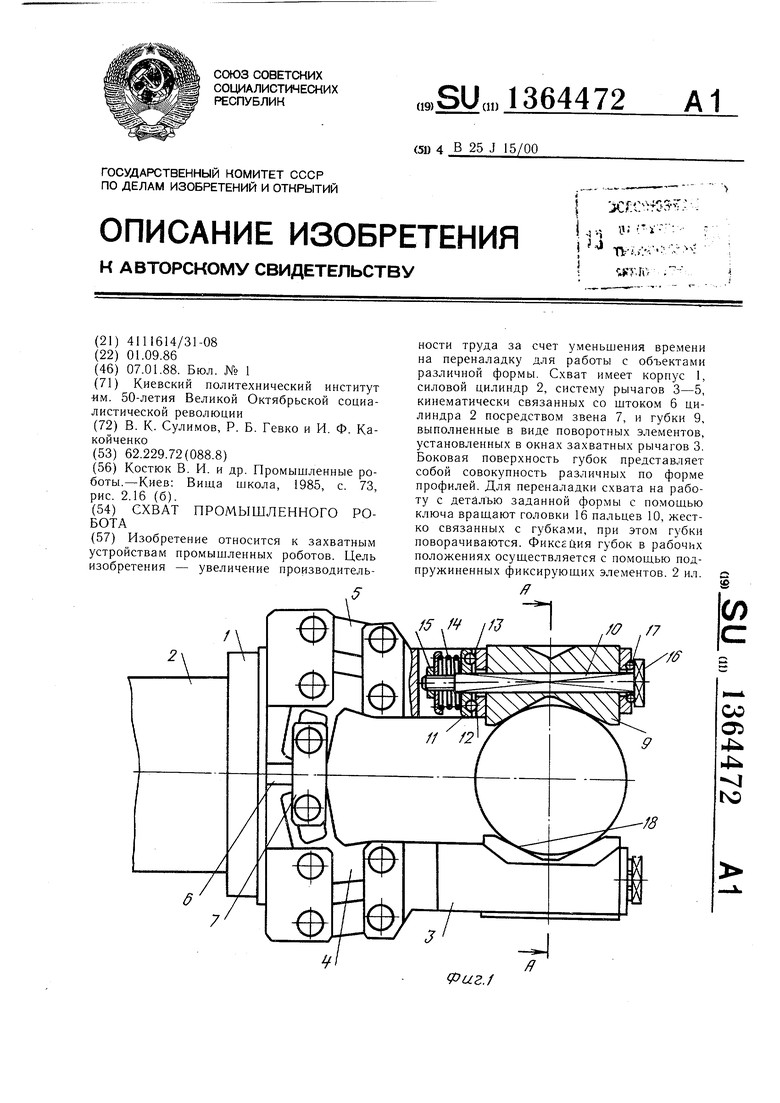
-/1
20 21
W
| Костюк В | |||
| И | |||
| и др | |||
| Промышленные роботы.-Киев: Вища школа, 1985, с | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
