Изобретение относится к электротехнике и может быть использовано для дистанционной передачи угловых перемещений в следящих системах двухстороннего действия с вентильными электродвигателями и силомомент- ным очувствлением при необходимости масштабирования усилий.
Целью изобретения является повышение точности дистанционной передачи угла поворота вала и отражения нагрузочных моментов, расширение функциональных возмонностей устройства за счет обеспечения масштабирования отражения нагрузочного момента.
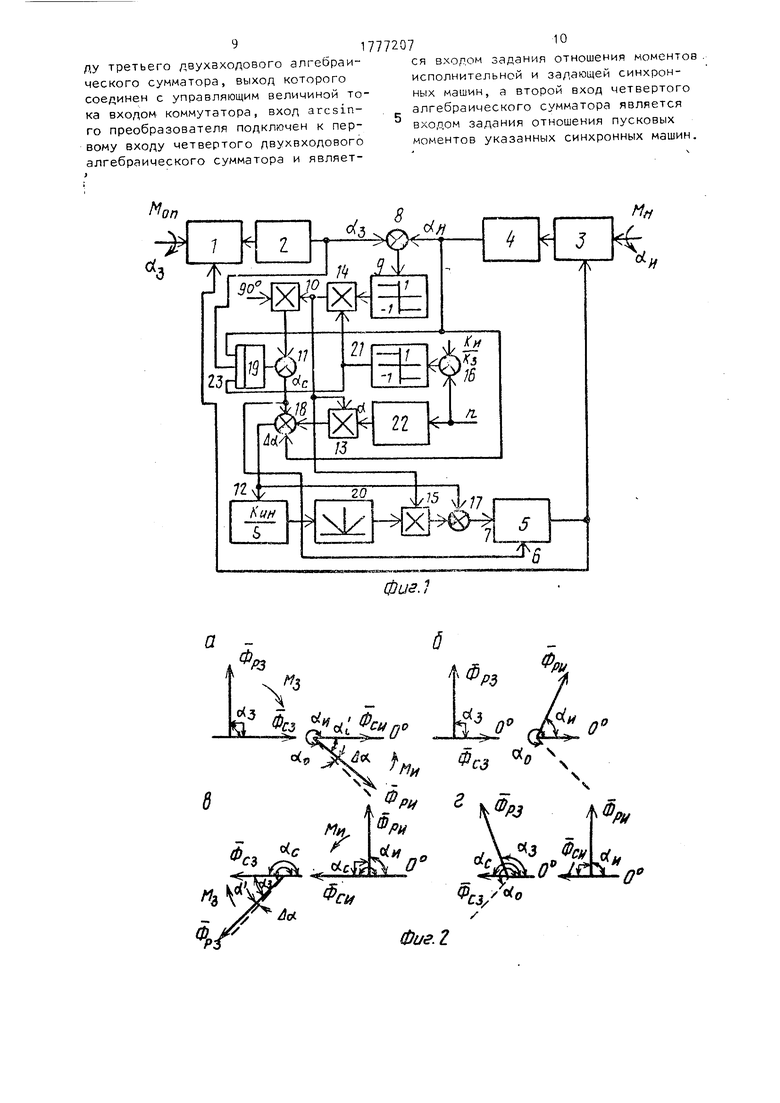
На фиг.1 изображена структурная схема устройства; на фиг.2 - векторные диаграммы магнитных полей синхронных машин.
Устройство для дистанционной передачи угла поворота вала содержит укрепленную на задающем валу синхронную машину 1 с первым датчиком 2 положения, исполнительную синхронную машину 3 с вторым датчиком k положения, коммутатор 5 с коммутируюцим 6 и упрлрпяющим величиной гока 7 входами, выход котогюго подключен к соеркнс нш м параллельно одноименным секциям задающей 1 и испол нительной 3 синхронных машин. Выход каждого из датчиков 2 и Ц положения подключен к соответствующему входу двух входового алгебраического сумматора 8, выход которого подключен к входу первого реле 9, блок 10 умножения на постоянный коэффициент, выход которого подключен к первому входу второго двухвходового алгебраического сумматора 11, выход которого подключен к коммутирующему входу 6 коммутатора 5, интегратор 12. Устройство дополнительно содержит три перемножителя 13 - 15, два двухвходовых 16 и 17 и один трехвходовой 18 алгебраических сумматора, мультиплексор 19, блок 20 выделения модуля, второе реле 21 и arcsin-й преобразователь 22, выход которого подключен к первому входу первого перемно- мителя 13 выход которого подключен к первому входу трехвходового алгебраического сумматора 18, второй вход - к выходу второго перемножителя lk, первому входу третьего перемножителя 15 и входу блока 10 умножения на постоянный коэффициент. Первый вход второго перемножителя 1 подключен к выходу первого реле 9 а второй вход - к выходу второго рел
21и управляющему входу 23 мультиплексора 19, первый и второй информационные входы которого подключены соответственно к выходам первого 2 и второго h датчиков положения, а выход - к второму входу второго двухвходового алгебраического сумматора 11. Выход этого сумматора подключен к второму входу трехвходового алгебраического сумматора 18, третий вход которого подключен к выходу второго датчика положения, а выход - к первому входу третьего двухвходового алгебраического сумматора 17 и входу интегратора 12. Зыход интегратора 12 связан через блок 20 выделения модуля с вторым входом перемножителя 15, выход которого подключен ко второму входу третьего двухвходового алгебраического сумматора 17, выход которого подключен к управляющему величиной тока входу 7 коммутатора 5. Вход arcsin-ro преобразователя
22подключен к первому входу четвертого алгебраического сумматора 16 и является входом задания отношения моментов исполнительной и задающей 1 .. синхронной машины, а второй вход
л г
сумматора 1о является входом задания отношения пусковых моментов тех же машин.
На фигурах и в тексте приняты д следующие условные обозначения:
oil (X и Углы поворота исполнительного и задающего валов (роторов) синхронных машин 1 и 3;
угол поворота магнитных по- g лей их статоров;
угол между магнитными полями ротора и статора той из синхронной машин, у которой он не равен 90 ;
з, М ц - вращающие моменты зада- 0 ющей и исполнительной синхронных машин ;
оп н нагрузочные моменты на задающем и дополнительном валах;
Рри сэ PC vi магнитные 5 поля роторов и статоров задающей и исполнительной синхронных машин.
Устройство дистанционной передачи угла поворота вала работает следующим образом.
0 Оператор с пульта задает необходимое ему значения отношения
Mji
„ - -. ;
(1)
которое преобразователь 22 преобразует в величину угла сЈ , который должен быть между магнитными полями роторов и статоров одной из синхрон- ных машин 1 и 3, чтобы выполнялось соотношение (1), причем у другой синхронной машины 3,1 магнитные поля ротора и статора перпендикулярны. При этом поля роторов отклонены от полей статоров в противоположные стороны, чтобы моменты ГЦ и М „ были противоположно направлены (см. фиг.2а и в). Для моментов на валах можно записать с учетом структурной схемы
М3 Кэ(йй + KMHl|iC6dt|), (2) Ми К оС1 (А 04 + KH(lJioidt| ) .
Формулы (2) соответствуют фиг.2а и б, а для диаграмм виг можно записать :
Ц К3 sin О ODiJ dt|),
ми KHUe6 + ки„1 J&&i, dt|), (3)
Ко, Ки - коэффициенты, определяемые конструкцией СМ (их отношение равно отношению пусковых моментов); АоЈ- отклонение РРи (фиг.2а) или 0 р (фиг.2в) от равновесного положения , где
«о К, ± (ui + 90°), Из (3) и (2) можно получить; Ни Кцз1пОб
СО
и 5
(5)
Ki
МиNJJ
М5
Отсюда для выполнения (1) при заданном п можно подобрать угол М. Преобразователь 22 должен выполнять следующую функцию:
Об arcsin
п К
. -г;
,-Кц
Gi arcsin
п К.,
Реализация такого преобразования возможна, например, на базе постоянного запоминающего устройства.
Таким образом, как видно из (5) для выполнения (1) поле ротора одной синхронной машины должно быть отклонено от поля статора на угол 90°, чтс обеспечивается в устройстве за счет прибавления или вычитания, в зависимости от знака , величины 90° к ориентации ее роторного поля (см. фиг.2). На фиг.2а и б это задающая синхронная машина 1, а на фиг.2в и г- исполнительная синхронная машина 3. Выбор необходимой синхронной машины осуществляется путем сравнения п
30 Блоки 18,20,15 и 17 составляют, по сути дела, псевдолинейное корректи- с/ рующее устройство, обеспечивающее ас- татизм в установившемся режиме (за счет интегратора 12) и отсутствие запаздывания управления, как это видно из (2) и (3). Перемножитель 15 используется для сохранения знака модуля интеграла, если знак ft. неизменен. Для пояснения необходимос.,. ти этого условия при изменении знака
М
j,, либо при изменении п рассмотрим
45
50
фиг.2а и б. В начале система находилась в установившемся состоянии (Л06 С, Ми п М„ М, Моп, Ми Мн). Допустим, что в силу каких-то причин М л уменьшился, при этом угол oi , как видно из (2), также станет меньше, что приведет к уменьшению И ц за счет уменьшения . При этом интегратор 12 начнет разряжаться, а
с --- на алгебраическом сумматоре
Ка
управляющий сигнал на выходе сумма тора 17 уменьшится за счет противоположности знаков Ьъб и модуля ин, - „,теграла. Если же, наоборот, Мн уве16 и реле 21. 3 зависимости от зна- личится, то & будет противополож- ка сигнала на выходе этого реле меня- 55 норо - мсрульже интеграла имеет ется знак сигнала на выходе блока TQT же 3Ha(j интегратор 12 за умножения 14, поскольку для обеспе- рржается, а сигнал на выходе сумма- чения противоположной направленности . 1 личится и за счет совпаде.
,
10
15
с-
7772С76
К т, и Мц необходимо менять направле -- ние отклонения поля статора от поля ротора (см.фиг.2а и в, направление Мз, в варианте а такое же, как и в , варианте в, причем противоположно направлению Ми). Выбор датчика 2 или ч осуществляется пои помощи мультиплексора 19. После статора синхронной машины, датчик которой выбран для управления, оказывается всегда перпендикулярным магнитному полю ее ротора, поскольку выход сумматора 11 подключен к коммутирующему входу коммутатора 5. Как указывалось выше, для выполнения (1) угол между Ф р-} и 0ри должен быть равен (90° +oL), поэтому за равновесное положение вала второй синхронной машины принима- 20 ется угол 0i0 из (4) и от него производится отсчет рассогласования Аоб , как это видно из фиг.2а, где
Л Об И и и 2в гДе Д С
o60-tf:) Если ДрЈ 0, то, как но из (6), выполняется (1). Рассогласование Aei вычисляется на выходе трехвходового алгебраического сумматора 18 и подается на входы интегратора 12 и двухвходового сумматора 17.
30 Блоки 18,20,15 и 17 составляют, по сути дела, псевдолинейное корректи- с/ рующее устройство, обеспечивающее ас- татизм в установившемся режиме (за счет интегратора 12) и отсутствие запаздывания управления, как это видно из (2) и (3). Перемножитель 15 используется для сохранения знака модуля интеграла, если знак ft. неизменен. Для пояснения необходимос.,. ти этого условия при изменении знака
35
М
j,, либо при изменении п рассмотрим
45
50
фиг.2а и б. В начале система находилась в установившемся состоянии (Л06 С, Ми п М„ М, Моп, Ми Мн). Допустим, что в силу каких-то причин М л уменьшился, при этом угол oi , как видно из (2), также станет меньше, что приведет к уменьшению И ц за счет уменьшения . При этом интегратор 12 начнет разряжаться, а
управляющий сигнал на выходе сумма тора 17 уменьшится за счет противоположности знаков Ьъб и модуля инния знаков Дс и интеграла. Случай изменения Моп будет отрабатываться точно так же, ведь при этом увеличится (или уменьшится) угол оЈ и изодром (блоки 12,20,15 и 17) точно также сведет рассогласование к нулю. Изменение п оператором приведет к изменению с(0 по (0, ЛоЈ и процесс будет аналогичен описанному выше.
При изменении знака М н угол oL начнет уменьшаться, а модуль & oi увеличиваться, но в этом случае знаки модуля интеграла и &с , как это видно из (2) и (3), противоположны, т.е. управление на выходе сумматора 17 будете течением времени уменьшаться (см.фиг.26 и г), поэтому поля роторов примут одинаковую ориентацию и знак о - изменится, что приведет к формированию нового значения (Х0 с противоположной стороны от
М
изменяет знак, и даРЗ з и И лее все процессы протекают аналогиино
описанным выше.
Положительный эффект в устройстве состоит в том, что оператор получает возможность изменять коэффициент масштабирования отражения нагру- зочного момента, что облегчает его работу при манипулировании предметами различной массы. Кроме того, повышается точность дистанционной передачи угла и отражения нагрузочных момен- тов.
Наличие рассогласования валов: в оЈ + 90° при работе не будет ощущаться за счет поддержания его неизменным при постоянном п и адаптивных возможностей человека-оператора, использующего визуальную обратную связы Кроме того, при использовании синхронных машин с Р парами полюсов ротора в реальных системах с редуктором, передаточное число которого N 100- 5СО, рассогласование на выходах редуктора будет иметь небольшую величину: (90° +oO/(P-N).
Формула изобретения
Устройство для дистанционной передачи угла поворота вала, содержащее укрепленную на задающем валу синхронную машину с первым датчиком положения, исполнительную синхронную машину с вторым датчиком положения, коммутатор с коммутирующим и управ
0
Ь
о s
д 5
0
5
ляющим величиной тока входами, выход которого подключен к соединенным параллельно одноименным секциям якорной обмотки задающей и исполнительной синхронных машин, выход каждого датчика положения подключен к соответствующему входу первого двухвходового алгебраического сумматора, выход которого подключен к входу первого реле, блок умножения на постоянный коэффициент, выход которого подключен к первому входу второго двухвходового алгебраического сумматора, выход которого подключен к коммутирующему входу коммутатора, интегратор, отличающееся тем, что, с целью повышения точности дистанционной передачи угла поворота и отражения нагрузочного момента, расширения функциональных возможностей за счет обеспечения масштабирования отражения нагрузочного момента, в него дополнительно введены три перемножителя, второе реле, два двух- входовых и один трехвходовой алгебраических сумматора, мультиплексор, блок выделения модуля и arcsin-й преобразователь, выход которого подключен к первому входу первого перемножителя, выход которого подключен к первому входу трехвходового алгеб-- раического сумматора, а второй вход первого перемножителя - к выходу второго перемножителя, первому входу третьего перемножителя и входу блока умножения на постоянный коэффициент, первый вход второго перемножителя подключен к выходу первого реле, а второй вход - к выходу второго реле и управляющему входу мультиплексора, первый и второй информационные входы которого подключены соответственно к выходам первого и второго датчиков положения, а выход мультиплексора - к второму входу второго двухвходового алгебраического сумматора, выход которого соединен с вторым входом трехвходового алгебраического сумматора, третий вход которого подключен к выходу второго датчика положения, а выход указанного сумматора соединен с первым входом третьего двухвходового алгебраического сумматора и входом интегратора, выход которого через блок выделения модуля связан с вторым входом третьего перемнотитсля. выходом подключенного к второму вхоЛУ третьего двухвходового алгебраического сумматора, выход которого соединен с управляющим величиной тока входом коммутатора, вход arcsin- го преобразователя подключен к первому входу четвертого двухвходового алгебраического сумматора и является входом задания отношения моментов исполнительной и задающей синхронных машин, а второй вход четвертого алгебраического сумматора является входом задания отношения пусковых моментов указанных синхронных машин.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1985 |
|
SU1617550A1 |
| Устройство для дистанционной передачи угла поворота задающего вала с масштабированием усилий | 1985 |
|
SU1702494A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1647789A1 |
| Устройство для дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1767636A1 |
| Устройство дистанционной передачи угла поворота задающего вала | 1985 |
|
SU1690110A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ЗАДАЮЩЕГО ВАЛА | 1987 |
|
RU2072107C1 |
Изобретение относится к электротехнике. Целью изобретения является повышение точности дистанционной передачи угла поворота вала и отражения нагрузочных моментов и расширение функциональных возможностей за счет обеспечения масштабирования отражения нагрузочного момента. Указанная цель достигается введением в устройство дистанционной передачи угла поворота вала второго реле 21, arcsin-ro преобразователя 22, мультиплексора 19, перемножителей 13- 15, сумматоров 16-18 и блока 26 выделения модуля. Введение указанных блоков позволяет организовать обратную связь в зависимости от коэффициента масштабирования с задающей либо исполнительной синхронной машиной (СМ) 1,3. Магнитные поля статоров СМ 1 и 3 ориентированы перпендикулярно ротору той из СМ, с датчика положения которой заводится обратная связь. Масштабирование усилий осуществляется изменением корректирующим устройством, включающим интегратор 12, амплитуды статорных магнитных полей до установления ротора второй СМ в положение, при котором отношение вращающихся моментов СМ будет равно коэффициенту масштабирования. 2 ил.
Ф.
РЗ
N % ; 0
си п
8
:ь
XNS
фиг. 1
0
си по
| Авторское свидетельство СССР № 1713402, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для дистанционной передачи угла поворота вала | 1986 |
|
SU1619371A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР , кп | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ( УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ УГЛА ПОВОРОТА ВАЛА | |||
