НМ&миккмавюгпшФь
1
(21)4351590/08
(22)28.12.87
(46) 15.11.91. Бюл. №42
(71)Ярославское научно-производственное объединение Электронприбор
(72)КАУкраженко, Н.И.Бондарев и С,Д.8а- сильченко
(53)62-589.8(088.8)
(56)Авторское свидетельство СССР № 339388, кл. В 23 Q 16/02, 1970.
(54)УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИСПОЛНИТЕЛЬНОГО ОРГАНА
(57)Изобретение относится к машиностроению и может найти применение в различных конструкциях, в которых осуществляется
И
Вид А
перемещение исполнительного органа на шаг. Целью изобретения является повышение производительности устройства за счет обеспечения быстродействия фиксации. При перемещении посредством приводного барабана 4 в направлении Y исполнительного органа 3 влево он поворачивает через подпружиненный упор 24 рычаг 8, на котором шарнирно закреплены подпружиненная соОачка У храпового механизма и подпружиненное коромысло 15, с выполненными на одном его плече пазами 17 и 18. При этом коромысло посредством взаимодействия паза 17 с упором 21 фиксатора выводит его из отверстия рейки 7 храпового
Г
(Л
С
о ю
о о
ю
Фи 1
механизма, предназначенного для перемещения исполнительного органа 3 в направлении X, а собачка 9, войдя в зацепление с рейкой 7, перемещает исполнительный орган 3 на шаг, В конце хода одно плечо коро- мысла 15, пройдя расстояние В, выставленное упором 23, закрепленным в корпусе 1, поворачивается, упор 21 фиксатора выходит из паза 17 коромысла 15, и под действием пружины 22 фиксатор заскакивает в отверстие рейки 7, фиксируя тем самым
исполнительный орган 3 но даяний позиции. После проведения работ на всех позициях исполнительный орган перемещается в исходное положение. При этом посредством перемещения коромысла 15 9 направлении В за счет взаимодействия упора 21 фиксатора с наклонным пазом 18 коромысла 15 и штифта 16, установленного на собаче 9 с плечом коромысла 15, собачка 9 и фиксатор одновременно выводятся из соединения с рейкой 7. 1 з.п. ф-лы, 2 ил.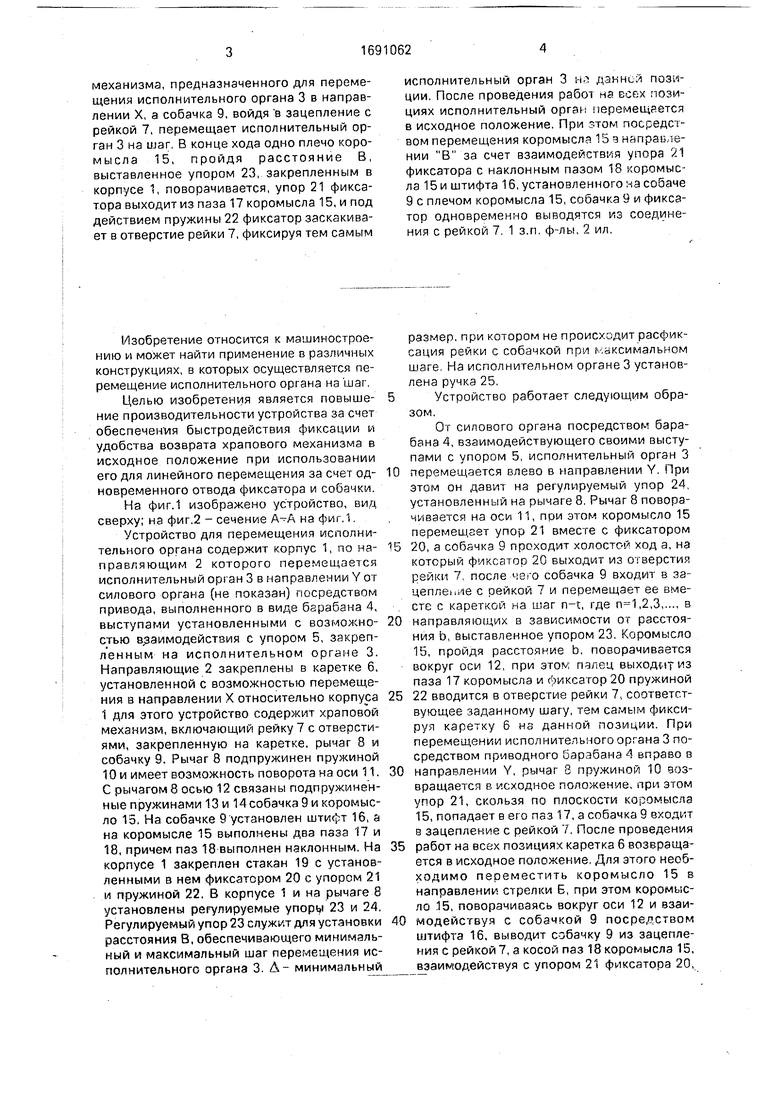
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шагового перемещения исполнительного органа установки для подачи материала в зону обработки | 1987 |
|
SU1433586A1 |
| Загрузочное устройство | 1987 |
|
SU1437184A1 |
| Устройство для контактной сварки | 1985 |
|
SU1310148A1 |
| Устройство для укладки ампул в кассету | 1988 |
|
SU1622224A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| ПОВОРОТНО-ДЕЛИТЕЛЬНОЕ ПРИСПОСОБЛЕНИЕ | 2005 |
|
RU2294276C1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Устройство для поштучной выдачи изделий | 1986 |
|
SU1425042A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОКАРНЫМ СТАНКОМ | 1940 |
|
SU63198A1 |
| Устройство для обработки штучных заготовок | 1989 |
|
SU1662727A1 |

Изобретение относится к машиностроению и может найти применение в различных конструкциях, в которых осуществляется перемещение исполнительного органа на шаг.
Целью изобретения является повышение производительности устройства за счет обеспечения быстродействия фиксации и удобства возврата храпового механизма в исходное положение при использовании его для линейного перемещения за счет одновременного отвода фиксатора и собачки.
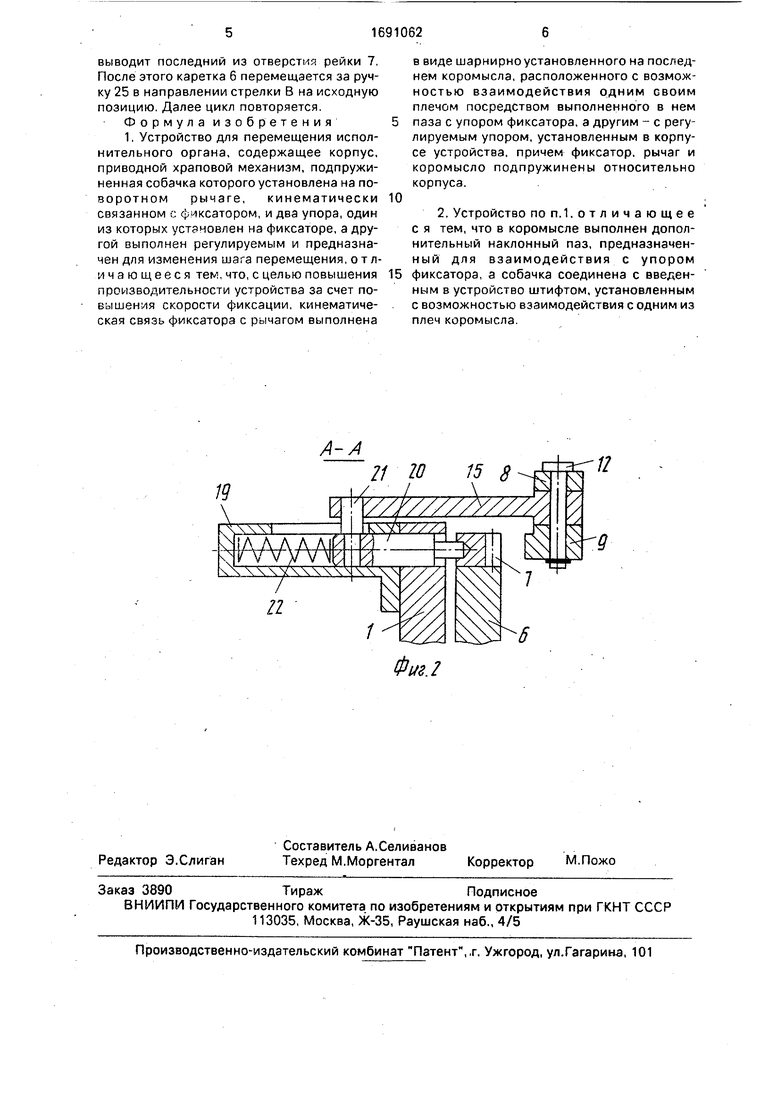
На фиг.1 изображено устройство, вид сверху; на фиг.2 - сечение А-А на фиг, 1.
Устройство для перемещения исполнительного органа содержит корпус 1, по направляющим 2 которого перемещается исполнительный орган 3 в направлении Y от силового органа (не показан) посредством привода, выполненного в виде барабана 4, выступами установленными с возможностью взаимодействия с упором 5, закрепленным на исполнительном органе 3. Направляющие 2 закреплены в каретке б, установленной с возможностью перемещения в направлении X относительно корпуса 1 для этого устройство содержит храповой механизм, включающий рейку 7 с отверстиями, закрепленную на каретке, рычаг 8 и собачку 9. Рычаг 8 подпружинен пружиной 10 и имеет возможность поворота на оси 11. С рычагом 8 осью 12 связаны подпружиненные пружинами 13 и 14 собачка 9 и коромысло 15. На собачке 9 установлен штифт 16, а на коромысле 15 выполнены два пзза 17 и 18, причем паз 18 выполнен наклонным, На корпусе 1 закреплен стакан 19 с установленными в нем фиксатором 20 с упором 21 и пружиной 22, В корпусе 1 и на рычаге 8 установлены регулируемые упоры 23 и 24. Регулируемый упор 23 служит для установки расстояния 8, обеспечивающего минимальный и максимальный шаг перемещения исполнительного органа 3. Л- минимальный
размер, при котором не происходит расфик- сация рейки с собачкой при г--,аксимальном шаге, На исполнительном органе 3 установлена ручка 25.
Устройство работает следующим образом.
От силового органа посредством барабана 4, взаимодействующего своими выступами с упором 5, исполнительный орган 3
перемещается влево в направлении Y. При этом он давит на регулируемый упор 24, установленный на рычаге 8. Рычаг 8 поворачивается на оси 11, пои этом коромысло 15 перемещает упор 21 вместе с фиксатором
20, а собачка 9 проходит холостой ход а, на который фиксатор 20 выходит из отверстия рейки 7. после чего собачка 9 входит в за- цепле.ие с рейкой 7 и перемещает ее вместе с кареткой на шаг n-t, где ,2,3,..., в
направляющих в зависимости от расстояния Ь, выставленное упором 23. Коромысло 15, пройдя расстояние Ь, поворачивается вокруг оси 12, при этом палец выходит из паза 17 коромысла и фиксатор 20 пружиной
22 вводится в отверстие рейки 7, соответствующее заданному шагу, тем самым фиксируя каретку 6 нз данной позиции. При перемещении исполнительного органа 3 посредством приводного барабана 4 вправо в
направлении Y, рычаг 8 пружиной 10 возвращается в исходное положение, при этом упор 21, скользя по плоскости коромысла 15, попадает в его паз 17, а собачка 9 входит в зацепление с рейкой 7, После проведения
работ на всех позициях каретка 6 возвращается в исходное положение, Для этого необходимо переместить коромысло 15 в направлении стрелки Б, при этом коромысло .15, поворачиваясь вокруг оси 12 и взаимодействуя с собачкой 9 посредством штифта 16, выводит собачку 9 из зацепления с рейкой 7, а косой паз 18 коромысла 15, взаимодействуя с упором 21 фиксатора 20,
выводит последний из отверстия рейки 7, После этого каретка 6 перемещается за ручку 25 в направлении стрелки В на исходную позицию. Далее цикл повторяется. Формула изобретения 1. Устройство для перемещения исполнительного органа, содержащее корпус, приводной храповой механизм, подпружиненная собачка которого установлена на по- воротном рычаге, кинематически связанном t4 фиксатором, и два упора, один из которых установлен на фиксаторе, а другой выполнен регулируемым и предназначен для изменения шага перемещения, отличающееся тем, что, с целью повышения производительности устройства за счет повышения скорости фиксации, кинематическая связь фиксатора с рычагом выполнена
А-А
0
5
в виде шарнирноустановленного на последнем коромысла, расположенного с возможностью взаимодействия одним своим плечом посредством выполненного в нем паза с упором фиксатора, а другим - с регулируемым упором, установленным в корпусе устройства, причем фиксатор, рычаг и коромысло подпружинены относительно корпуса.
21 W 15
Фиг. 2
