Д1и iiaBCCKH и ci) штучных изделии, наii|).i к|1 -1111ых от;|ивок, иа поднесиой конпейср, и ч(кет быть использовано для механизации иогрузочно-разгрузочиых работ.
Извостио персгрузочиое устройство для нодвесиого конвейера, включающее раму, механизмы поворота и передвижения, силовой объемный гидр опривод, грузоиесушую каретку со стрелой, вертикальные наирав.тяющие 11,
Недостатком данного устройства является его иеременхение лии1ь в направлении, нернендикулярном к оси коивейера. Так как это позволяет обслуживать только один крюк конвейера, находящийся в зоне действия устройства, то, естественно, снижает производительность конвейера из-за возможной его иеио.тной загрузки, К тому же в случае ненсиравности в гидросистеме может произойти поломка всего устройства, так как в рабочем положении устройство пере|ораживает собой движение изделию.
Наиболее близким к нредлагаемому по технической суп1ности и достигае.мо.му результату является перегрузочное устройство д, подвесного конвейера, включаюнхее нереме п|аюп1уюся вдоль осп подвесного конвейера тележку, в вертикалынз х нагфавЛЯЮ1ПНХ которой смонтирована на катках каретка с выдвижной и новоротной в горизонта.льной нлоскости стрелой, иа захватной го,ловке которой установлен крюк 2.
1:1едостатком данного устройства яв;1яется нрнмекение крюка, снабженного приводом, д,1я совершения и,м тол1д о вер1Т ка,тьного неременхения. Так как нри горизо тальном Д1(;1жснин вдо,ль конвейера или же нрн (ятусканни стрелы крюк может встретить н 1е1 ятетвне, то их столкнсякдн е приводит к по;1омке.
Цел1 изобретения иовьпнение надежности и безоиасное1Т- pa6oiTji устройства.
Поставленная и.е,1ь достнгается те.м, что в иерегрузочном устройстве для нодвесно1о конвейера, зк;почаюп1,ем 1:ереме1даю1цуюся вдо,:1ь оси нодвеспого конвейера тележку, в вертпкалы-;ь х нанрав;1ЯЮ1цих которой la ка|ках каретка с выдвижной в горизонта.тьмой илосна захватной головке которой ста1;ов,1ен крюк, стрела снабжена демнtjjejiOM, |;1||,чолненны 1 в виде подпружиненных iuj,i:iVHOB, а захват:1ая 1оловка - дву.я р1)1чагами, устаноз,(сипымн с нротивоноложной от крюка стороны с возмож К)стыо взаимодействия с иодир -жнненными ползунами, H)ii -JTOM зах; атная головка смонтирована iia стреле п.оередством вертикальной оси, а крюк на захватной головке - носредстг,ом г ;ризо1Г|-аль 1ой оси и имеет поДнружингиный замок.
На фиг. 1 изображено npe.;viarae.Moe уетоойсгво: на фиг. 2 впд А на фиг. I: на
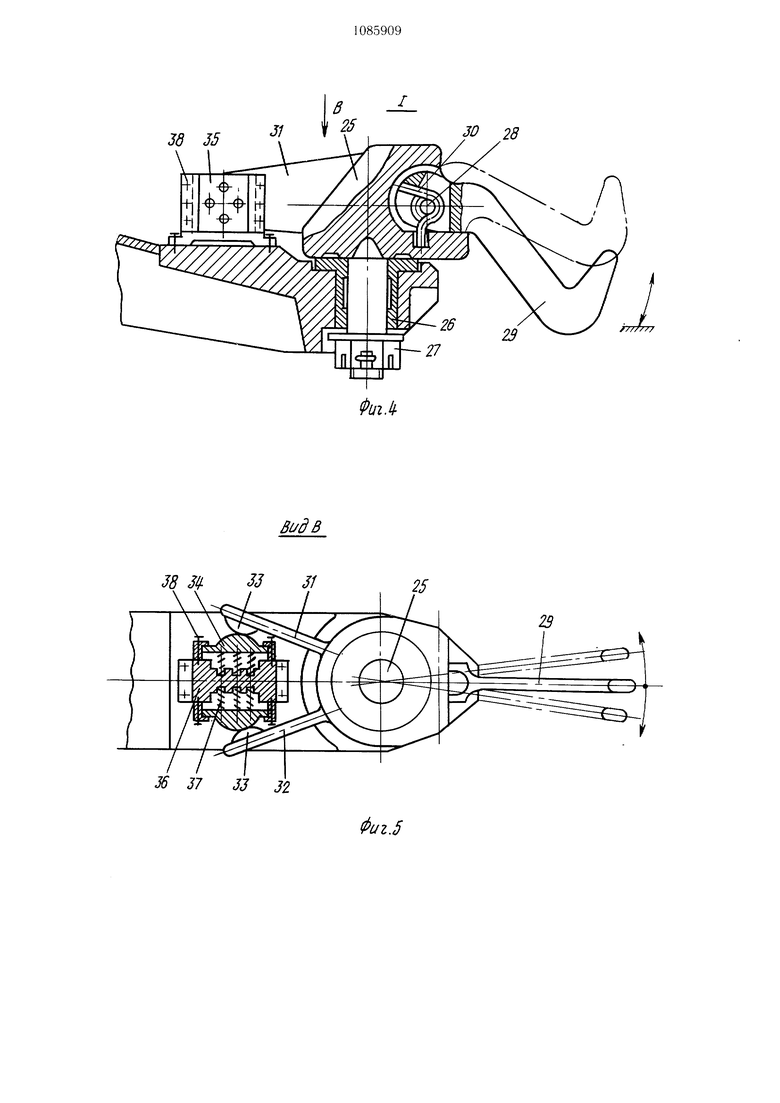
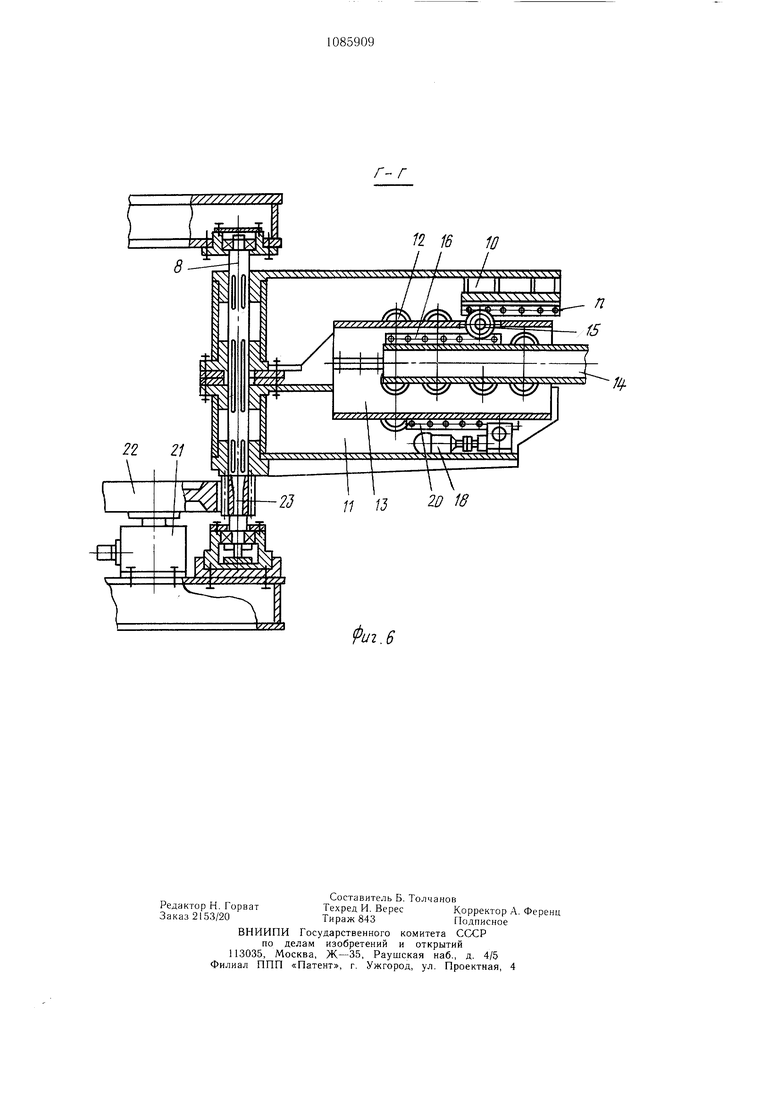
фиг. 3 - разрез Б-Б на фиг. 2; на . 4 - узел I на фиг. 1; на фи1. 5 - вид В на фиг. 4; на фиг. 6 - разрез Г-Г на фиг. 3. Устройство содержит тележку 1, опирающуюся ходовыми колеса.ми 2 на рельсовый нуть 3, на верхней плоскости которой установлены нривод горизонтального передвижения 4 устройства и вертикальные наи авляюн1ие 5, но которым на катках б неремеп1,ается каретка 7, имеющая в своей нередней части вертикальный вал 8, на котором смонтирована выдвижная стрела 9, состоящая из верхней 10 и нижней II направляющих, внутри которых неремещаютея, онираясь на ролики 12, нро.межуточная 13 и основная 14 каретки. На валу нро.межуточной каретки 13 смонтирована зубчатка 15, входяни1я одновременно в запенле1П1е с невка.ми 16, расноложенными на основной каретке 14, и с цевками 17, закренленными внутри верхней нанравляюн ей 10. На выходно.м валу редуктора нривода 18 выдвижения стрелы 9 размещена щестерня 19, входящая в заненление с цевками 20, установленны.чи ка нижней нлоскости нро.чежуточной каретки 13. Врапхение стрела 9 нолучает от нривода 21, на выходном валу которого закренлено зубчатое колесо 22, постояпно взаимодействующее с Ч1естерней 23, смонти;)ованной на ва,1у 8. В нередней части осно1Н1ой ка)етки 14 расположена захватная головка 24. вертикальиая ось 25 которой онирается иа иоди1инннк 26 и застопорена от выпадания гайкой 27, В нередней части захватной головки 24 установлен на горизонтальной оси 28 крюк 29, снабженный пружинным замком 30, Сзади от крюка на захватной головке 24 имеется два рычагалевый 31 и нравый 32, каждый из которых снабжен упорами 33, взаимодействующими с левым 34 и правым 35 ползунами, которые постоянно ноднружннены расно;10жен1Н)Гмн в корнусе 36 нружинами 37 и все в.месте оии образуют де.мифер 38. На верхней части вертикальных нанравляю1пих 5 смонтирован механизм вертикального нсре.меняения 39 каретки 7, а также блок верхних опор
40,взаимодейетвующих с на11равляюн1ими
41.Устройство расиоложено между нодвееным конвейером 42 и поддонами 43 с ложенньгми в них в опредеменном ноложе1П1и изделиями 44, на которых :,афик1ирова11ы Сье.мные захваты 45. Каждая :К;двеека конвейера 42 имеет свою 1р -зонссун;ую часть 46, а на трассе конвейера установлен датчик 47 наличия нзделия на подвеске конвейера, нодключенный к нени управления устройством.
Устройство нри загрузке конвейера нзде;|нями работает следующим образом.
Нзде.чня 44 с закрегьтеиньгмн на них захватами 45 установлены в ячейках поддонов 43, которые в свою очередь установлены в сиениальном нриямке, ориентирующем их параллельно оси движения устройства, а следовательно и оси конвейера 42. В исходном положении каретка 7 находится в нижнем положении, а стрела 9 повернута к поддонам 43. Оператор вводит крюк 29 при помощи привода 18 в предназначенное ему место в захвате 45 первого ряда изделий 44 и механизмом вертикального пере.мещения 39 производит подъем каретки 7, по мере подъема которой происходит выемка изделия 44 из ячейки поддона 43. Как только изделие вышло из поддона, оператор механизмом передвижения 4 перемещает устройство, при необходимости, на некоторое расстояние в поисках свободной подвески 46 конвейера 42 с одновременным поворотом стрелы 9 в горизонтальной плоскости благодаря приводу 21 и взаимодействию зубчатой пары 22 и 23. Подъем каретки 7 прекращается при достижении ею уровня, когда будет обеспечен гарантированный зазор между верхней вильчатой частью захвата 45 и грузонесущей частью 46 подвески. При этом срабатывает датчик, прекращающий подъем. Когда подвеска конвейера 42 надвинулась на верхнюю часть захвата, оператор механизмом 39 производит опускание каретки 7, в результате чего захват 45 с изделием 44 повисает на грузонесущей части 46 подвески конвейера, т.е. соверщается загрузка его. Затем, продолжая опускание каретки 7 по вертикальным направляющи l 5 с помощью привода 39 с одновременным поворотом стрелы 9 в исходное положение, с помощью привода 21 оператор, .манипулируя механизмом передвижения 4, перемещает устройство к следующему изделию. Поскольку поддоны 43 имеют несколько рядов ячеек с расположенными в них изделиями 44, устройство работает сначала с изделиями первого ряда, а затем второго ряда. Для обслуживания изделий второго ряда служит выдвижная стрела 9, каретки 13 и 14 которой получают движение от цевочного нривода 18. Оператор с пульта подает команду на поиск изделия второго ряда и привод 18 выдвигает каретки 13 и 14 на требуемое расстояние, которое соответствует осям захватов 45 изделий 44 второго ряда и которое контролируется датчиком. Втягивание выдвижных кареток на уровень оси конвейера происходит автоматически при полном выходе изделия 44 из поддона 45, что контролируется датчиком. По окончании загрузки подвески конвейера 42 происходит автоматическое выдвижение кареток 13 и 14 на уровень оси изделий второго ряда и цикл повторяется, Если в процессе опускания каретки 7 происходит наезд крюка 29 на какое-либо препятствие, то для предотвращения поломки, он поворачивается на угол в вертикальной плоскости благодаря срабатыванию нружинного замка 30, с которым крюк 29 взаимодействует, а датчик, контролирующий это перемещение, сработает и сблокирует механизм вертикального перемещения 39 каретки 7, и оператор, .манипулируя механизмом 4, отводит устройство на безопасное расстояние, позволяющее крюку 29 беспрепятственнно опуститься в исходное положение, т.е. происходит освобождение крюка. Если же при повороте стрелы 9 в горизонтальной плоскости также произойдет наезд крюка 29 на какое-либо препятствие, то в этом случае происходит врап1,ение вокруг оси 25 захватной головкп 24, а значит и крюка 29, в подн щпнмке 26, в резу,1ьтите чего один из рычагов 31 или 32 в зависимости от направления поворота своими упорами 33 воздействует на 34 пли 35 демпфера 38, сжимая пружины 37. что дает возможность крюку 29 и захватной го.юпке 24 повернуться на некоторый хгол, достаточный для дальнейщего движения самого устройства. Затем, под воздействием распрямляющихся пружин 37, захватная головка 24 с крюком 29 возвращается в исходное положение. Если же угол поворота крюка 29 значительный, то во избежание полного сжатия пружин 37 срабатывает датчик, отключающий привод 21 поворота стрелы 9, и оператор отводит устройство на расстояние, в результате чего крюк 29 пружинами 37 приводится в исходное положение. При разгрузке конвейера устройство работает в обратном порядке. По мере освобождения поддонов от изделий при соверщенип павещивания их па конвейер или же по мере заполнения поддонов при разгрузке конвейера они убираются на следующую технологическую операцию цеховым краном, Предлагаемое устройство позволяет сократить номенклатуру грузоподъемных механизмов, обслуживающих подвесной копвейер; повысить падежпость и безопасность его работы, а следовательно, улучшить условия работы обслуживающего персонала; повысить производительность и сократить цикл работы устройства.
Напьаёлеиие Вид А коньейера Ось поЗ ес/Уого коиёейера ffch i/f:/npoiJc/77Sa
В-В //роЗольнь/е ош nodoDHD с uj e/juflMu 38 35


ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО ПОДВЕСНОГО КОНВЕЙЕРА, включающее перемещающуюся вдоль оси подвесного конвейера тележку, в вертикальных направляющих которой смонтирована на катках каретка с выдвижной и поворотной в горизонтальной плоскости стрелой, на захватной головке которой установлен крюк, отличающееся тем, что, с пелью повышения надежности и безопасности работы устройства, стрела снабжена демпфером, выполненным в виде подпружиненных ползунов, а захватная головка - двумя рычагами, установленны.ми с противоположной от крюка стороны с возможностью взаимодействия с подпружиненными ползунами, при этом захватная головка смонтирована на стреле посредством вертикальной оси. а крюк на захватной головке - посредством горизонтальной оси и имеет подпружиненный замок. (О (Л о 00 01 о о со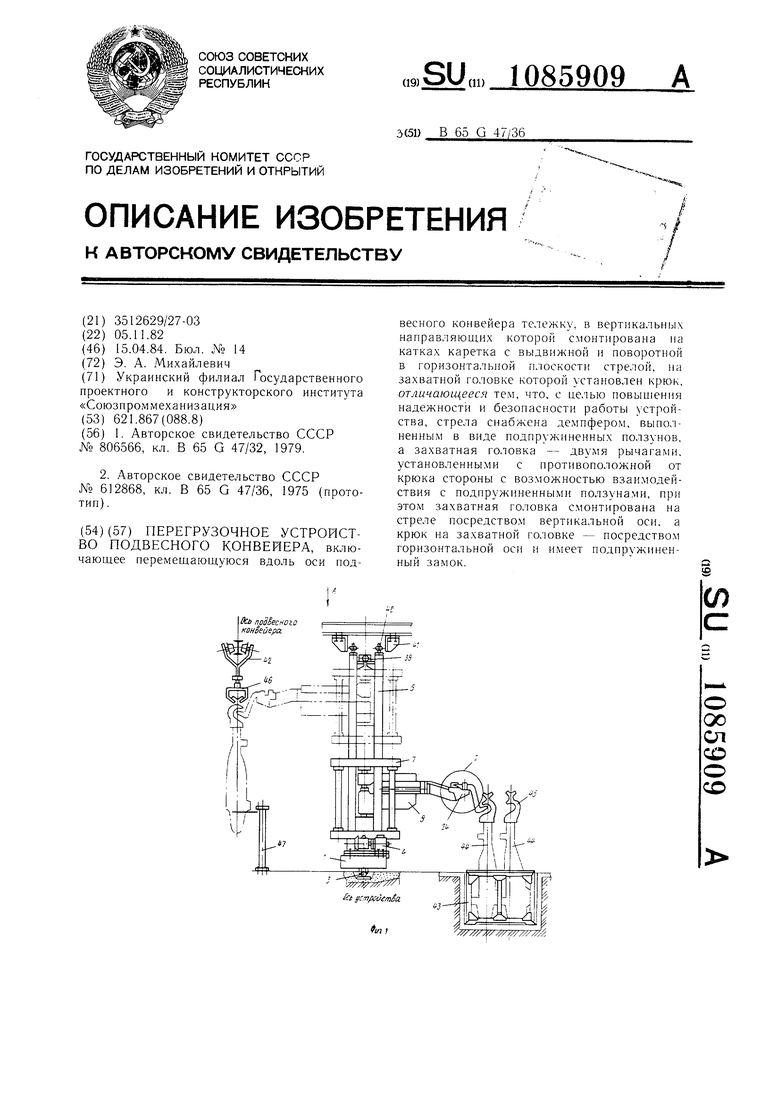
Вид В 38 31 cJJ
Фи1.5 51 П 16 11 W /
| I | |||
| Устройство для навешивания и съемаиздЕлий | 1979 |
|
SU806566A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для перегрузки подвесок с подвесного грузонесущего конвейера на рабочее место | 1975 |
|
SU612868A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
