Изобретение относится к автоматизации технологических процессов и может быть использовано в области машиностроения.
Целью изобретения является поаыше- йие производительности за счет увеличения вероятности захвата деталей,
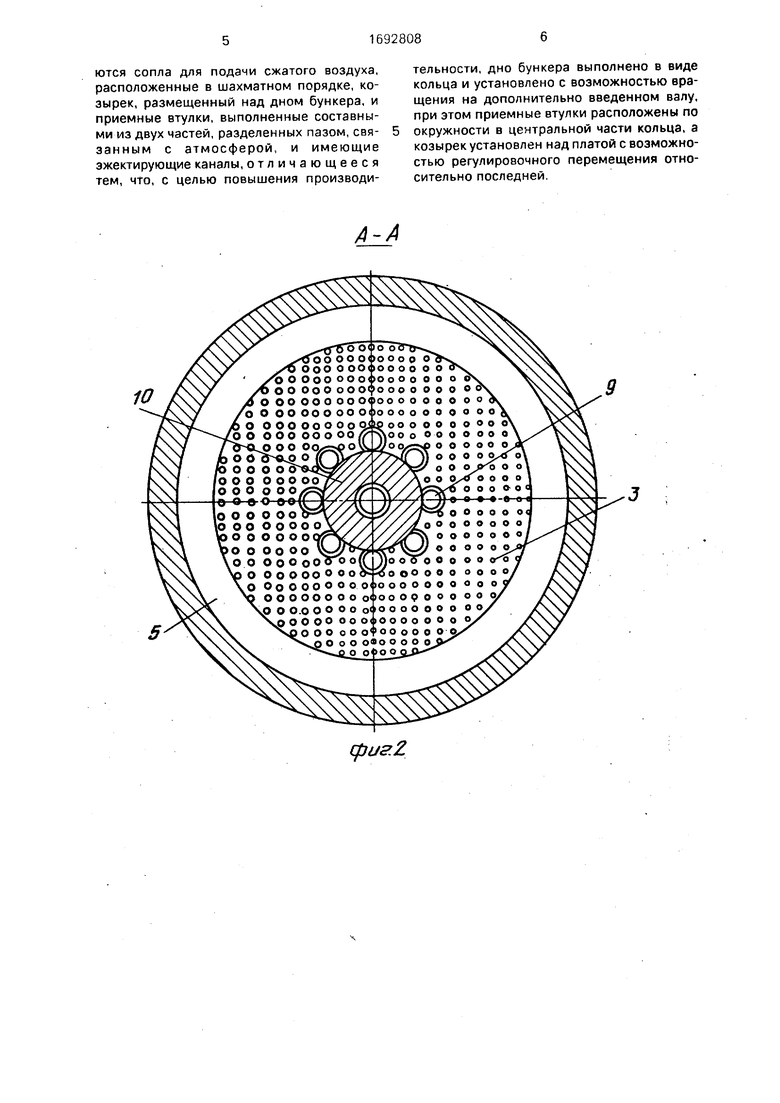
На фиг, 1 показано устройство, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - схема сил, воздействующих на деталь в процессе ориентации.
Загрузочное устройство имеет полость 1, соединенную с источником сжатого воздуха, ограниченную вращающимся корпусом 1 и круговой платой 2, имеющей сопла 3, расположенные в шахматном порядке, причем крайний ряд находится под козырьком 4 два 5 кольцевого бункера б, установленного на резьбе 7 корпуса 1 для изменения величины зазора между козырьком 4 и круговой платой 2, причем дно 5 фиксируется при помощи защелки 8, а приемные втулки 9 установлены по окружности у ограничителя 10, расположенного в центре узла ориентации. Приемные втулки 9 размещены в соосных отверстиях, выполненных в круговой плате 2 и корпусе 1. причем они снабжены зжектирующими каналами В, а также имеют паз 11, сообщающийся с атмосферой, и соединены с: приемником 12, куда подаются детали 13.
Устройство работает следующим образом.
Детали 13 под действием силы тяжести соскальзывают на вращающуюся от вала 14 поверхность круговой платы 2, где на них воздействует результирующая аэродинамическая сила Р (фиг, 3), возникающая при истечении сжатого воздуха через сопла 3 из полости А. Под воздействием горизонтальной составляющей аэродинамической силы деталь 13 приобретает скорость Уд и перемещается к приемным втулкам 9. Сила Яадгор является результирующей от распределенной горизонтальной силы qrop, создаваемой горизонтальным воздушным потоком Qro|), возникающим при истечении сжатого воздуха через сопла 3, расположенные под козырьком 4 наклонного дна 5 кольцевого бункера 6. Величина составляющей аэродинамической силы регулируется подь бмом или опусканием по резьбе 1 козырька 4 наклонного дна 5 кольцевого бункера Б, зазор фиксируется защелкой 8 на бункере 6. Сила Радгор также зависит от скорости потока, который изменяется от площади проходного сечения сопел 3. При движении деталей 13 освобождается пространство у козырька 4 и по наклонному дну 5 кольцевого бункера 6 на круговую плату 2 соскальзывают следующие детали 13, т. е
-
производится автоматический отбор деталей 13 из бункера 6 и подача их к приемным втулкам 9. Одновременно в процессе транспортировки на деоли 13 воздейст5 вует вертикальная составляющая аэродинамической силы РадВ, которая является результирующей от распределенной силы qB, возникающей при истечении сжатого воздуха через сопла 3.
10 Сила Радв приложена к середине детали 13, и так как центр тяжести ее смещен на величину А, то возникает вращающий момент Мвр , деталь 13 поворачивается, принимая вертикальное положение. Выпол15 нение сопел 3 в шахматном порядке, например с шагом -я- d, где d - диаметр детали
13, обеспечивает устойчивость детали 13 в процессе транспортировки, так как при этом
20 деталь 13 постоянно оказывается в пространстве, ограниченном четырьмя струями воздуха Q8, имеющими вертикальное направление, В процессе транспортировки деталей 13 к приемным втулкам 9 осущест25 вляется их активная ориентация, а так как они под действием вращающего момента Мвр переворачиваются более тяжелыми концами вниз и принимают устойчивое положение, то к приемным втулкам 9 подаются
30 полностью сориентированные детали 13, что исключает загрузку неориентированных деталей 13 и повышается надежность устройства, Процессу транспортировки и ориентации деталей 13 способствует вращение
35 круговой платы 2. При достижении ограничителя 10, который стоит неподвижно, детали 13 зависают под приемными втулками 9, так как линейная скорость в центре незначительная и вертикальная составляющая
40 аэродинамической силы , то детали 13 под действием силы тяжести G западают во втулки 9, расположенные по окружности ограничителя 10, и далее при попадании в зону пониженного давления, возникающую
45 при истечении сжатого воздуха из полости А через эжектмрующие каналы В, детали 13 ускоряются и подаются в приемник 12, а затем передаются на обработку. После за- падания деталей 13 в приемных втулках 9 50 возникает поток воздуха, препятствующий западанию во втулки 9 следующих деталей. Для удаления области пониженного давления во втулках 9 выполнен паз 11, сообщающийся с атмосферой.
55 Формула изобретен и я
Загрузочное устройство, содержащее бункер, в дне которого размещен узел ориентации, выполненный в виде платы, образующей с корпусом камеру, соединенную с источником сжатого воздуха, в которой имеются сопла для подачи сжатого воздуха, расположенные в шахматном порядке, козырек, размещенный над дном бункера, и приемные втулки, выполненные составными из двух частей, разделенных пазом,свя- занным с атмосферой, и имеющие эжектирующие каналы, отличающееся тем, что, с целью повышения производительности, дно бункера выполнено в виде кольца и установлено с возможностью вращения на дополнительно введенном валу, при этом приемные втулки расположены по окружности в центральной части кольца, а козырек установлен над платой с возможностью регулировочного перемещения относительно последней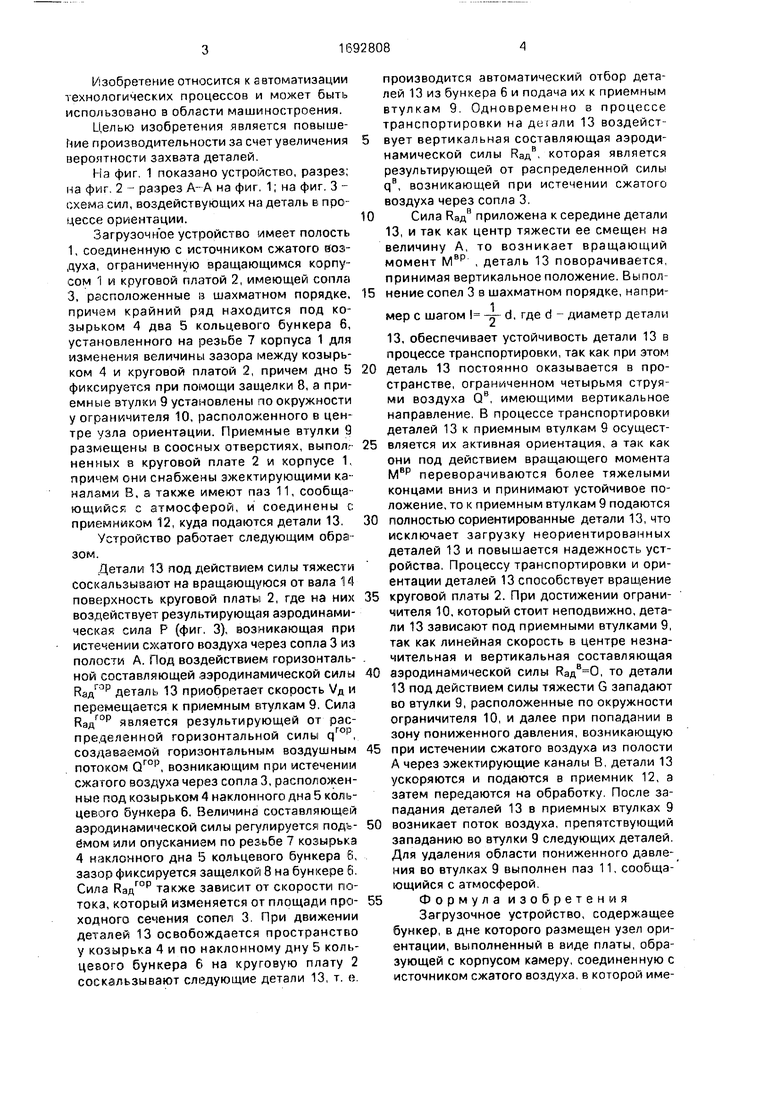
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1987 |
|
SU1509219A1 |
| Способ групповой загрузки деталей | 1989 |
|
SU1696257A1 |
| Струйное загрузочное устройство | 1977 |
|
SU701757A1 |
| Способ групповой загрузки деталей | 1987 |
|
SU1511049A1 |
| СТРУЙНОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 2001 |
|
RU2199428C2 |
| Устройство для ориентированной пневматической подачи несимметричных деталей | 1989 |
|
SU1676963A2 |
| СПОСОБ ПОДАЧИ МАСЛА В МЕЖРОТОРНЫЙ ПОДШИПНИК ОПОРЫ РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2613964C1 |
| Устройство для ориентации стержневых деталей | 1982 |
|
SU1038185A1 |
| ФИЛЬТРОВАЛЬНАЯ СИСТЕМА ДЛЯ ВЫТЯЖНОГО КОЛПАКА И ВЫТЯЖНОЙ КОЛПАК | 2003 |
|
RU2305482C2 |
| Пневматический сборочный схват | 1985 |
|
SU1404230A1 |
Изобретение относится к автоматизации технологических процессов и может быть использовано в машиностроении. Цель изобретения - повышение производительности. Для этого в загрузочном устройстве, содержащем бункер, в дне 5 которого размещен узел ориентации, выполненный в виде платы 2, образующей с корпусом камеру, соединенную с источником сжатого воздуха, в которой имеются сопла 3 для подачи сжатого воздуха, расположенные в шахматном порядке, козырек 4, размещенный наД дном бункера, и приемные втулки 9, выполненные из двух частей, разделенных пазом, связанным с атмосферой, и имеющие эжек- тирующие каналы, дно 5 бункера выполнено в виде кольца и установлено с возможностью вращения. Приемные втулки 9 расположены по окружности в центральной части кольца. Козырек 4 установлен над платой 2 с возможностью регулировочного перемещения. Детали под действием силы тяжести соскальзывают на вращающуюся от вала 14 плату 2. В результате возникающих аэродинамических сил деталь принимает верти- . кальное положение и поступает в приемную втулку 9. 3 ил. Ё С ч ю 00 о 00
А-А
фигЈ
//
фиг.З
| Загрузочное устройство | 1987 |
|
SU1509219A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
