Изобретение относится к автоматизации технологических процессов в машиностроении и может быть применено в роторных системах.
Цель изобретения - расширение технологических возможностей способа за счет обеспечения загрузки деталей в процессе вращения в роторных системах.
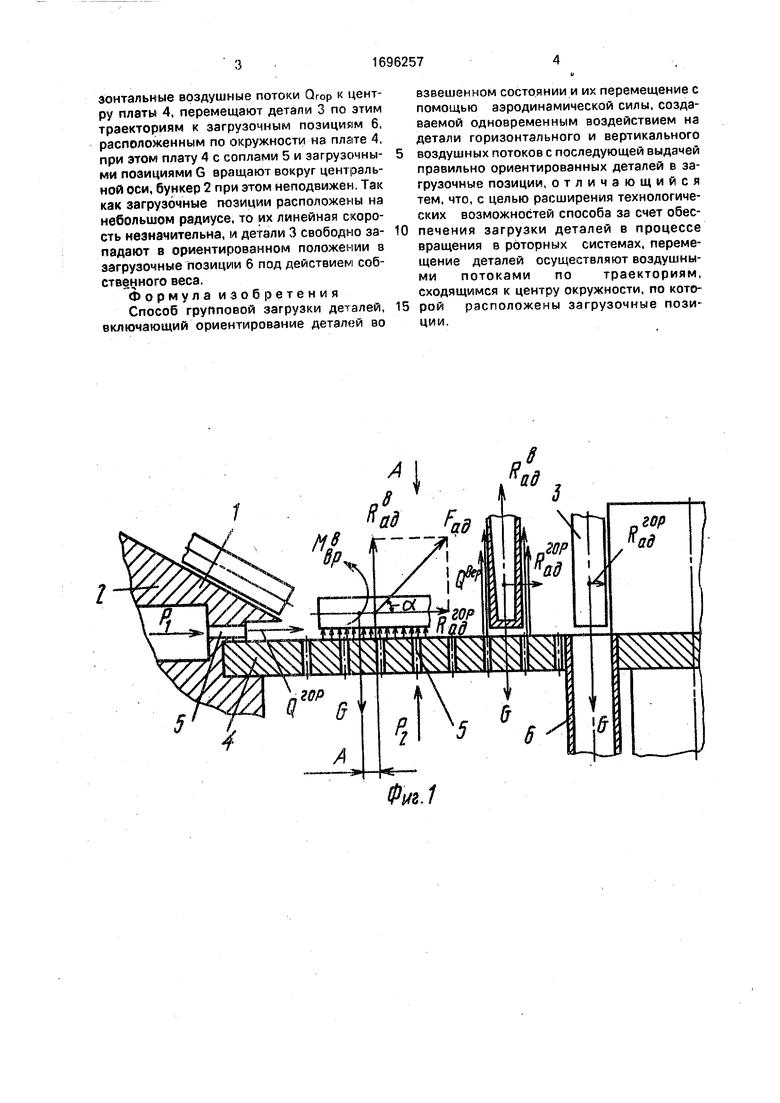
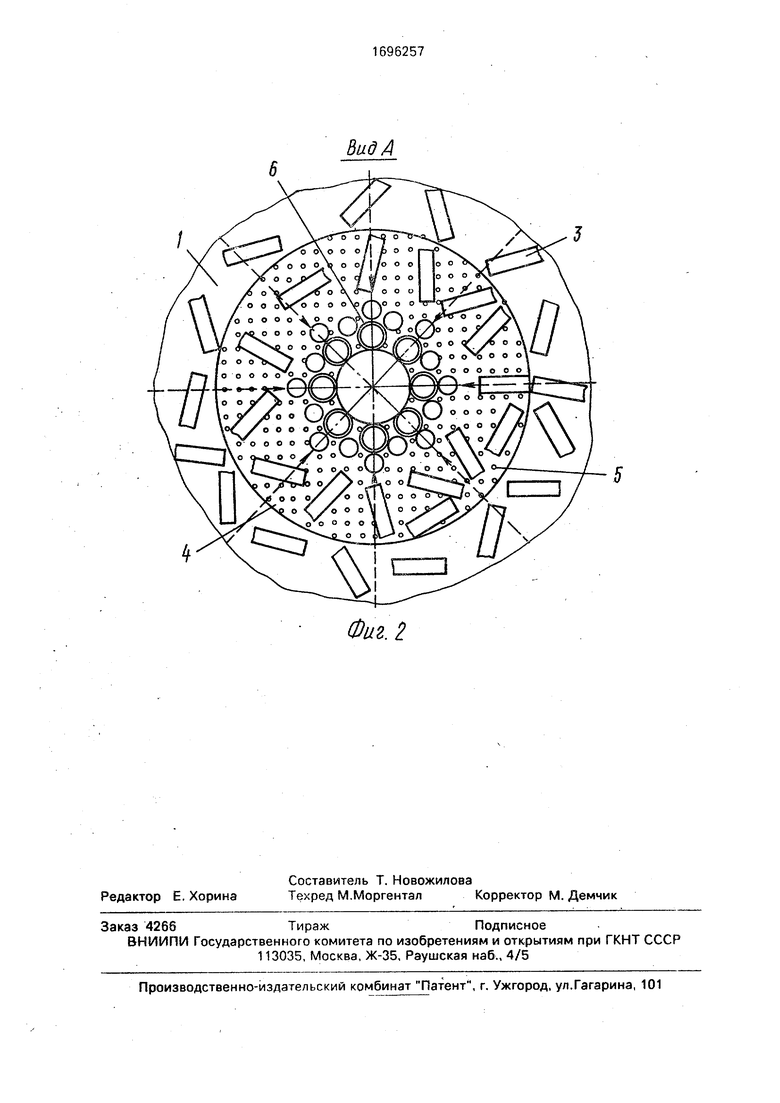
На фиг. 1 показана схема устройства для реализации предлагаемого способа; на фиг.2 -,вид А на фиг.1.
Загрузка деталей предлагаемым способом осуществляется следующим образом.
По наклонному дну 1 бункера 2 детали 3 под действием собственного веса перемещаются на прверхность платы 4, где под действием аэродинамической силы Рад, создаваемой горизонтальным Qr0p и вертикальным Оверт потоками, возникающими при истечении сжатого воздуха из сопел 5, взвешиваются под платой 4 и одновременно перемещаются от наклонного дна 1 к загрузочным позициям 6. Вертикальная составляющая Rafl8 аэродинамической силы
Рад приложена к середине взвешенной детали 3, которая стремится занять устойчивое положение по отношению в струям воздуха, а так как центр тяжести ее смещен на величину А, то возникает вращающий момент МВр., поворачивающий деталь 3 более тяжелым концом вниз, в вертикальное положение. Взвешивание детали 3 осуществляется вертикальным воздушным потоком Овер., а перемещение от дна 1 бункера 2 к загрузочным позициям 6 - горизонтальным воздушным потоком Qrop. При этом угол наклона «результирующей аэродинамической силы Рад будет изменяться и при определенном значении PI и Ра угол наклона а вектора аэродинамической силы Г-ад над загрузочными позициями 6 будет равен 90°.
Независимая регулировка PI и Р2 дает возможность обеспечивать необходимое значение величины и угла наклона а аэродинамической силы Рад в зависимости от параметров детали (вес, длина;диаметр и другие), позволяющее осуществлять ориентацию и загрузку деталей. Направляя горисл
с
ho
зонтальные воздушные потоки drop к центру платы 4, перемещают детали 3 по этим траекториям к загрузочным позициям 6, расположенным по окружности на плате 4, при этом плату 4 с соплами 5 и загрузочными позициями G вращают вокруг центральной оси, бункер 2 при этом неподвижен. Так как загрузочные позиции расположены на небольшом радиусе, то их линейная скорость незначительна, и детали 3 свободно западают в ориентированном положении в загрузочные позиции 6 под действием собственного веса.
Формула изобретения Способ групповой загрузки деталей, включающий ориентирование деталей во
0
взвешенном состоянии и их перемещение с помощью аэродинамической силы, создаваемой одновременным воздействием на детали горизонтального и вертикального воздушных потоков с последующей выдачей правильно ориентированных деталей в загрузочные позиции, отличающийся тем, что, с целью расширения технологических возможностей способа за счет обеспечения загрузки деталей в процессе вращения в роторных системах, перемещение деталей осуществляют воздушными потоками по траекториям, сходящимся к центру окружности, по которой расположены загрузочные позиции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1989 |
|
SU1692808A1 |
| Способ групповой загрузки деталей | 1987 |
|
SU1511049A1 |
| Загрузочное устройство | 1987 |
|
SU1509219A1 |
| Способ групповой загрузки деталей | 1977 |
|
SU701756A1 |
| Устройство для ориентированной пневматической подачи несимметричных деталей | 1989 |
|
SU1676963A2 |
| Струйное загрузочное устройство | 1977 |
|
SU701757A1 |
| РОТОРНАЯ МАШИНА СБОРКИ | 1992 |
|
RU2014195C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЕТАЛЕЙ | 1986 |
|
SU1420773A1 |
| Загрузочный ротор | 1989 |
|
SU1712125A1 |
| Загрузочный ротор | 1989 |
|
SU1602677A1 |
Изобретение относится к автоматизации технологических процессов в машиностроении и может быть применено в роторных системах. Цель изобретения - расширение технологических возможностей способа за счет обеспечения загрузки деталей в процессе вращения в роторных системах. Детали ориентируют в бункере во взвешенном состоянии и перемещают с помощью аэродинамической силы Рад, создаваемой одновременным воздействием на детали воздушных потоков по траекториям, сходящимся к центру окружности, по которой расположены загрузочные позиции, с последующей выдачей правильно ориентированных деталей в загрузочные позиции. 2 ил.
Ф м.1
Вид А
Фиг. 2
| Загрузочное устройство | 1987 |
|
SU1509219A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
