Аналогично в случае формирования
на выходе шифратора 18 итерационных переменных управляющего сигнала на
выходе 32 производится вычисление
новых координат u
v,4.
а именно
J4( J+1
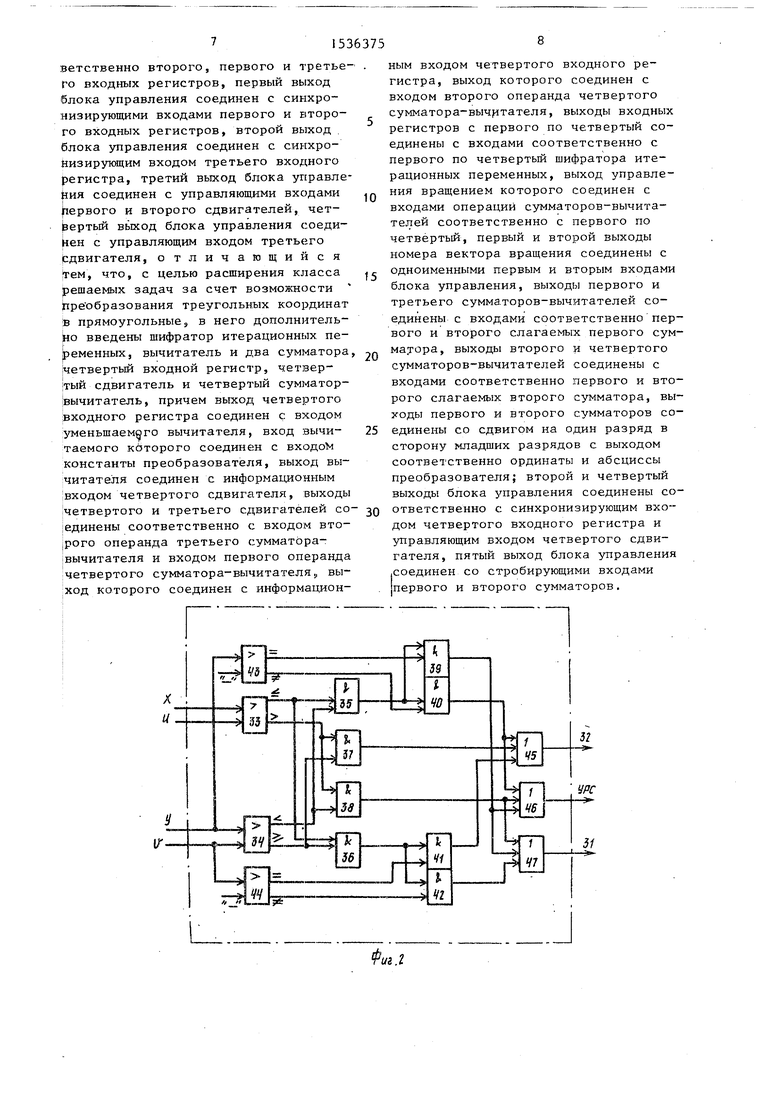
по сигналу выхода 32 и тактовому сигналу Ј в блоке управления производится вычитание 1 в первом счетчике
61и прибавление 1 во втором счетчике 62. С выхода второго счетчика
62сформированная константа сдвига , передается на управляющие входы сдвигателей 17 и 16, на которых реализуются выражения (uj-B) 2 , vj .
На сумматорах-вычитателях 11 и 12 реализуется выражение (2). Результат с выхода сумматоров-вычитателей 11 и 12 пропускается на входные регистры 23 и 24. Содержимое входных регистров 21 и 22 не изменяется.
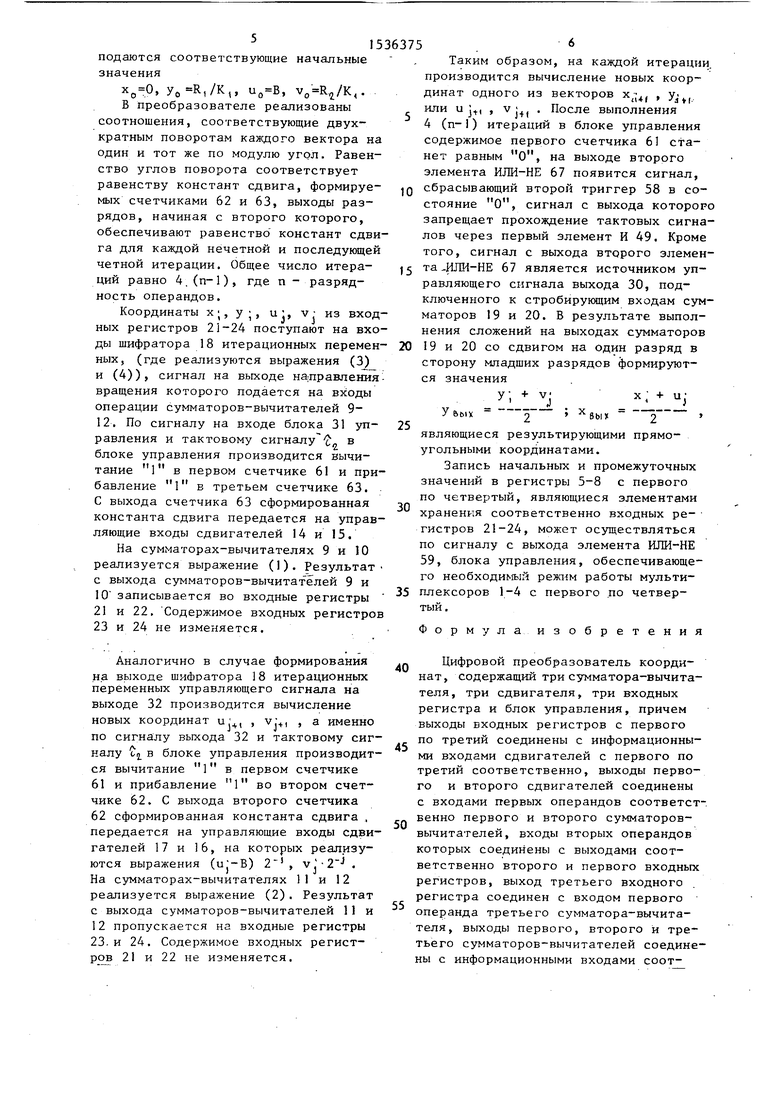
Цифровой преобразователь координат, содержащий три сумматора-вычита- теля, три сдвигателя, три входных регистра и блок управления, причем выходы входных регистров с первого по третий соединены с информационными входами сдвигателей с первого по третий соответственно, выходы первого и второго сдвигателей соединены с входами первых операндов соответственно первого и второго сумматоров- вычитателей, входы вторых операндов которых соединены с выходами соответственно второго и первого входных регистров, выход третьего входного регистра соединен с входом первого операнда третьего сумматора-вычита- теля, выходы первого, второго и третьего сумматоров-вычитателей соединены с информационными входами соот
7153
ветственно второго, первого и третьего входных регистров, первый выход блока управления соединен с синхронизирующими входами первого и второго входных регистров, второй выход блока управления соединен с синхронизирующим входом третьего входного регистра, третий выход блока управления соединен с управляющими входами ервого и второго сдвигателей, чет- (вертый выход блока управления соединен с управляющим входом третьего сдвигателя, о тличагощийся тем, что, с целью расширения класса решаемых задач за счет возможности Преобразования треугольных координат в прямоугольные, в него дополнительно введены шифратор итерационных переменных, вычитатель и два сумматора четвертый входной регистр, четвертый сдвигатель и четвертый сумматор- вычитатель, причем выход четвертого входного регистра соединен с входом уменьшаемого вычитателя, вход вычитаемого которого соединен с входов константы преобразователя, выход вычитателя соединен с информационным входом четвертого сдвигателя, выходы четвертого и третьего сдвигателей со единены соответственно с входом второго операнда третьего сумматора- вычитателя и входом первого операнда четвертого сумматора-вычитателя„ выход которого соединен с информацион
0
15
30
20
25
ным входом четвертого входного регистра, выход которого соединен с входом второго операнда четвертого сумматора-вычитателя, выходы входных регистров с первого по четвертый соединены с входами соответственно с первого по четвертый шифратора итерационных переменных, выход управления вращением которого соединен с входами операции сумматоров-вычита- телей соответственно с первого по четвертый, первый и второй выходы номера вектора вращения соединены с одноименными первым и вторым входами блока управления, выходы первого и третьего сумматоров-вычитателей соединены с входами соответственно первого и второго слагаемых первого сумматора, выходы второго и четвертого сумматоров-вычитателей соединены с входами соответственно первого и второго слагаемых второго сумматора, выходы первого и второго сумматоров соединены со сдвигом на один разряд в сторону младших разрядов с выходом соответственно ординаты и абсциссы преобразователя; второй и четвертый выходы блока управления соединены соответственно с синхронизирующим входом четвертого входного регистра и управляющим входом четвертого сдвигателя, пятый выход блока управления соединен со стробирующими входами первого и второго сумматоров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вычисления тригонометрических функций | 1986 |
|
SU1370653A1 |
| Вычислительное устройство | 1986 |
|
SU1361546A1 |
| Устройство для вычисления тригонометрических функций | 1986 |
|
SU1332313A1 |
| Устройство для вычисления функций | 1986 |
|
SU1374219A1 |
| Арифметическое устройство с плавающей точкой | 1985 |
|
SU1259248A1 |
| Устройство для вычисления модуля и аргумента вектора | 1986 |
|
SU1403063A1 |
| Устройство для вычисления функции | 1986 |
|
SU1348829A1 |
| Матричный преобразователь координат | 1988 |
|
SU1559343A1 |
| Функциональный преобразователь | 1983 |
|
SU1136154A1 |
| Устройство для поиска координат точки экстремума функции двух переменных | 1981 |
|
SU966703A1 |
Изобретение относится к вычислительной технике и может быть использовано в специализированных вычислителях, осуществляющих преобразование координат. Целью изобретения является расширение класса решаемых задач за счет возможности преобразования треугольных координат в прямоугольные. Преобразователь содержит мультиплексоры 1-4, регистры 5-8, сумматоры-вычитатели 9-12, вычитатель 13, двигатели 14-17, шифратор итерационных переменных 18, сумматоры 19-20, входные регистры 21-24, блок 25 управления. Введение шифратора итерационных переменных, вычитателя, сдвигателя, сумматора-вычитателя обеспечивает возможность выполнения преобразования нового типа, реализуемого по принципу "цифра за цифрой". 3 ил.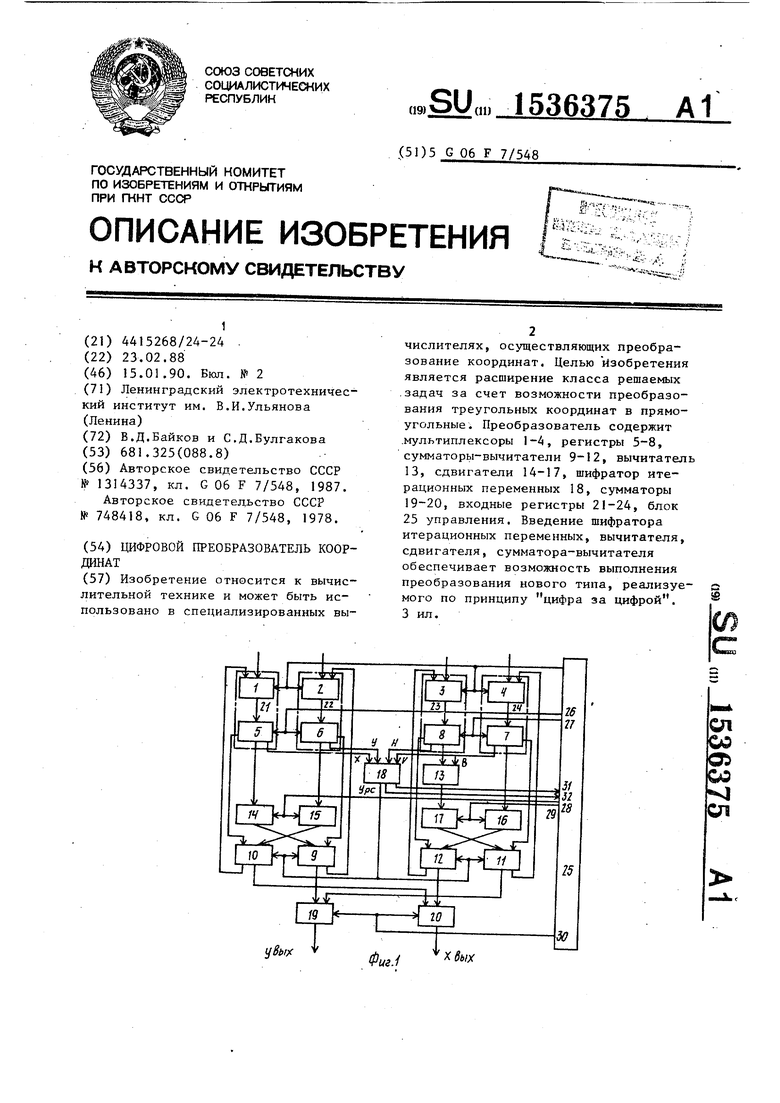
| Устройство для вычисления функций | 1985 |
|
SU1314337A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для вычисления функций | 1978 |
|
SU748418A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
