1
Изобретение относится к вычислительной технике, предназначено для стабилизации координат и углов трехмерного вектора пространства и является усовершенствованием технического решения по авт. св. № 1403062. Целью изобретения является расширение класса решаемых задач за счет возможности стабилизации параметров вектора.
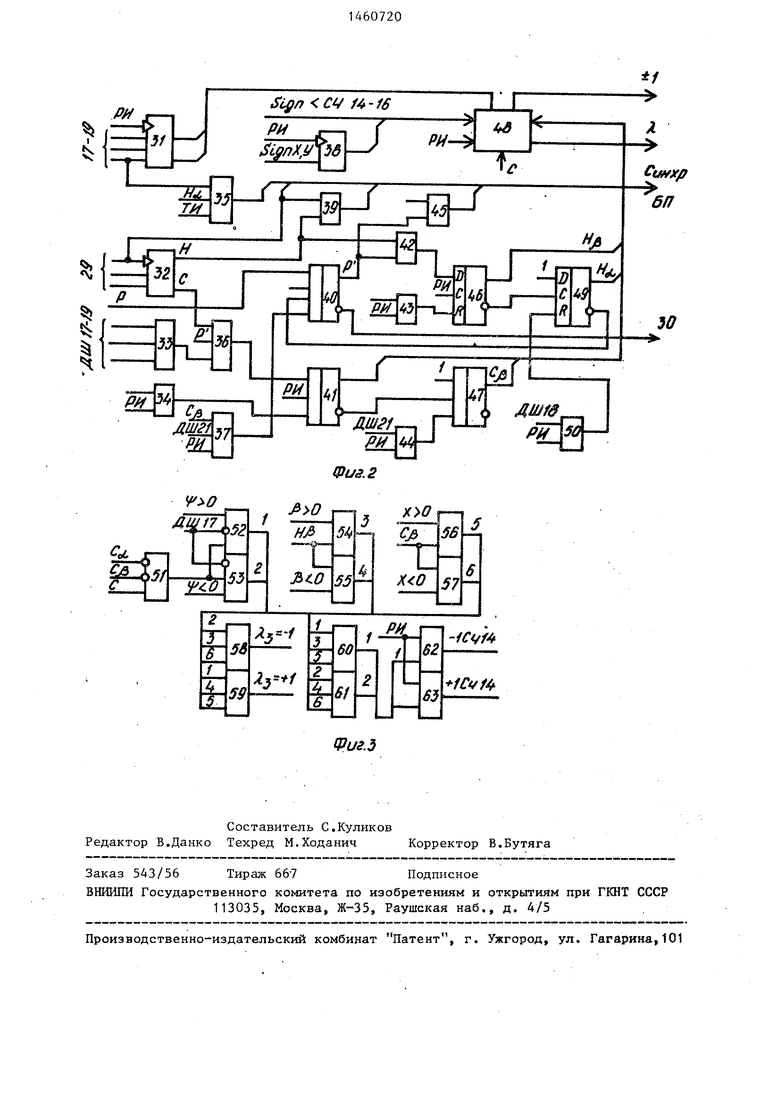
На фиг.1 представлена функциональная схема устройства; на фиг.2 - вариант реализации блока управления { на фиг.З - вариант реализации шифратора управляющих сигналов.
Устройство содержит блок 1 поворота вектора, регистры 2-7 соответственно с первого по шестой, сум- маторы-вычитатели 8-13 соответственно с первого по шестой, счетчики 14- 16 соответственно с первого по третий, дешифраторы 17-21 соответственно с первого по пятьй, блок 22 управления, входы 23-25 соответственно .первого, второго и третьего угла вектора, выходы 26 и 27 стабилизированных углов, вход 28 запуска, вход 29 режима и выход 30 готовности.
Блок управления содержит первый .и второй регистры 31 и 32, с первого . по пятый элементы И 33-37 соответст- звенно,третий регистр 38, шестой элемент И 39, первьй и второй триггеры 40 и 41, элементы И 42-45 соответственно с седьмого по десятьй, третий и четвертый триггеры 46 и 47, шифратор 48 управляющих сигналов, пятьй триггер 49 и одиннадцаТьй элемент И 50.
Шифратор управляющих сигналов содержит элементы И 51-57 соответственно с первого по седьмой, элементы ИЛИ 58-63 соответственно с первого По шестой.
Устройство функционирует следующим образом.
Устройство обеспечивает два режима вычисления:
режим Наведение, в котором по , заданным углам наведения вектора 5 рассчитьшаются проекции х. У вектора в неподвижной системе координат;
режим Стабилизация, в котором по нестабилизированным координатам х , у, 2 и углам разворота под- вижной системы координат q, Q и у рассчитываются стабилизированные
0
0
координаты х , .
и стабилизированные углы наведения ci и /Ь .
Основой всех вычислений является преобразование координат, выполняемое по итерационному алгоритму вращения вектора с шагом ь. 2 .
-к
X,..,, х;-1-7(,2 z;i
25
У,ч, у;- Л,2- х;. + 2- 2
(1)
0
5
0
г. :f +71 2 х- -4 2 V. 1+1 z,-«-n,z X, У J
где kb п/2, п - длина разрядной
сетки.
Операторы направления вращения вектора равны:
в режиме Наведение
присб з О, прИсС 0,
при стабилизации коор динат
fsign q; при qij O, I О при ,
при стабилизации углов
Tsign у- при yjf O, О при у 0,
JC7 : :ч/пл 1«.
.f-signc О
при стабилизации координат
, 1л
sign Q; при , О при ,
шестой. В первом цикле вычислений отрабатываются все итерации только по оператору А, Л(. В последней g итерации при , Д2.0 получаем результаты преобразования
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования координат вектора в трехмерном пространстве | 1986 |
|
SU1403062A1 |
| Вычислительное устройство | 1983 |
|
SU1167604A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МОДУЛЯ ТРЕХМЕРНОГО ВЕКТОРА | 1993 |
|
RU2040039C1 |
| Функциональный преобразователь | 1986 |
|
SU1456951A1 |
| Устройство для цифровой обработки сигналов | 1985 |
|
SU1336028A1 |
| Векторный процессор | 1979 |
|
SU849228A1 |
| Устройство преобразования координат | 1987 |
|
SU1472902A1 |
| Вычислительное устройство | 1988 |
|
SU1522196A1 |
| Функциональный преобразователь | 1983 |
|
SU1136154A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КООРДИНАТ | 1991 |
|
RU2007749C1 |
Изобретение относится к области вычислительной техники и может быть применено для стабилизации углов и координат трехмерного вектора. Целью изобретения является расширение класса решаемых задач за счет возможности стабилизации параметров вектора. Устройство содержит блок 1 поворота вектора, регистры 2-7 со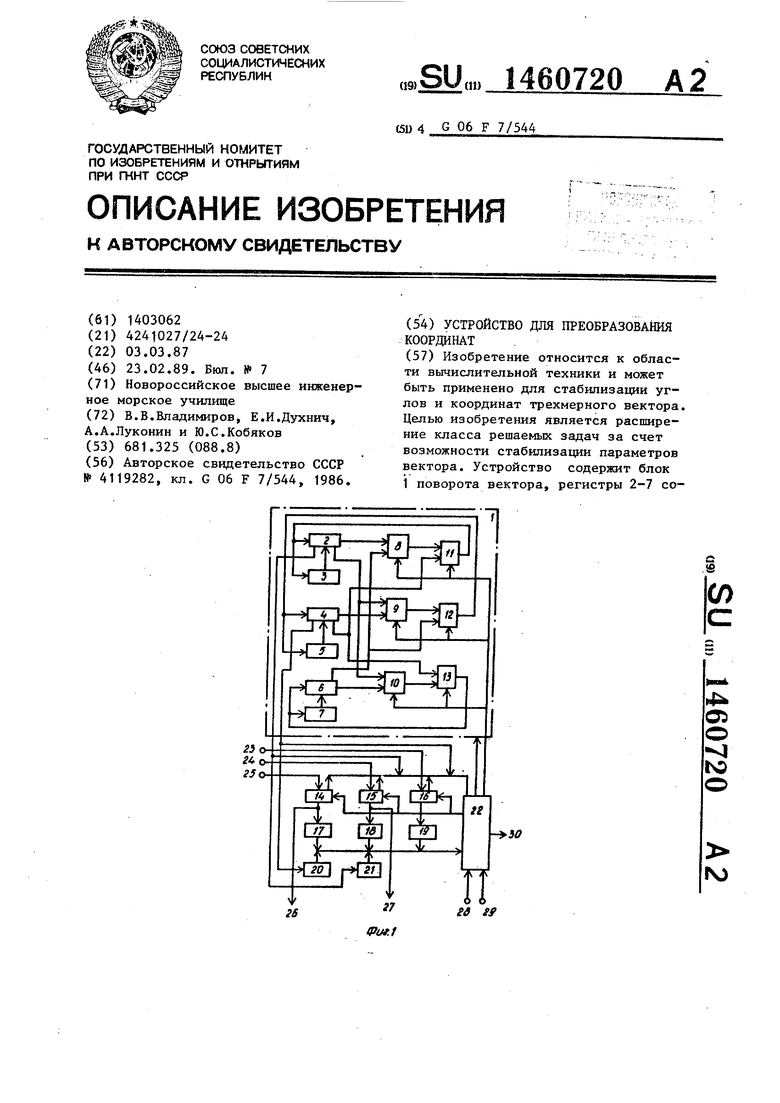
в режиме Наведение и при стабилизации углов
г о;
в режиме Наведение
Г-sign р при) )0, О при 0,
при стабилизации координат
rsignCjJ; ,
1 П гт.т / 1 . П
I О при (; 0
при стабилизации углов
fsign Xj при , I о при X; 0.
Углы, соответствующие вращению вектора, определяются выражениями
u
ч;
Ы.
--л, ,
. п-К
чи.
К.Ч2 %
5u, Q;.
(3)
fl.,.(,.2 .
Vu, 9;- Лу2 ; , режиме Наведение в первый и второй счетчики 14 и 15 по входам 25 и 24 заносятся углы наведения в и ci соответственно. Начальные данные , у О и z 1 записываются в регистры 3, 5 и 7 блока 1 поворота вектора и перезаписываются одновременно в регистры 2, 4 и 6. По входу 29 в блок 22 управления заносится код режима Наведение. По сигналу запуска, поступающему по входу 28, блок 22 управления вьщает сигналы сдвига информации в регистрах 2, 4 и 6, и начинаются вычисления. Операторы Л вырабатываются в блоке 22 управления в соответствии с алгоритмом (2) и вьщаются на сумматоры-вычитатели 8-13 соответственно с первого ito
-Г.,
sin
уГ
У 1 + .
Р
О, 4-, 2 cosfi.
Бо втором цикле отрабатываются все итерации по оператору Л, Л при Aj 3 О- последней итерации получаем результаты преобразования
х
р cosci
0
у;,
г
2 г.,
у р sinoi , -z cos А,
которые записываются в регистры 3, 5 и 7 и являются начальными данными для режима Стабилизация.
Одновременно с преобразованием 25 координат блок 22 управления ввдает на первый счетчик 14 (в первом цикле) и второй счетчик 15 (во втором цикле) счетные импульсы ±2 в соот- ветствии с алгоритмом (3), сводя их содержимое к нулю. Циклы вычислений заканчиваются , 0 по сигналам с первого и второго де-(1 шифраторов 17 и 18 соответственно. Блок 1 поворота вектора независимо от режима вычислений работает по алгоритму (1) следующим образом. В 1-й итерации на первые входы первого, второго,и третьего сумматоров- вычитателей 8-10 с первого, третьего и пятого регистров 2, 4 и 6 соот.0
0
5
ветственно поступают координаты х; , У;, Zj . Умножение координат х-, у, Zj на коэффициент 2.f осуществляется монтажным сдвигом . в связях первого, третьего и пятого регистров 2, 4 и 6с вторыми входами соответствующих сум- маторов-вычитателей.
На первом сумматоре-вычитателе 8
0
вычисляется величина
.,
На четвертом сумматоре-вычитателе. 11 вычисляется величина х-- S,+ Л/2 У| , записываемая в первый регистр 2. Аналогичным образом на втором, пятом, третьем и шестом сум- маторах-вычитателях 9, 12, 10 и 13 вычисляются ,координаты у, +, и z , соответственно, записываемые в третий и пятый регистры 4 и 6. При(-
о
5
О (j 1 2, 3) соответствуюв1ее слагаемое равно нулю и второе слагаемое передается через сумматор- вычитатель без изменения.
В режиме Стабилизация в первьй второй и третий счетчики 14-16 по входам 25, 24 и 23 записываются уг- лы (j), q и Q соответственно. При занесении по входу 29 кода режима начальные данные х , у , z записы
ваются в регистры 2, 4 и 6 из регистров 3, 5 и 7. По сигналу запуска, поступающему по входу 28, блок 22 управления выдает серии сдвига информации в регистрах 2, 4 и 6, и начинается вычисление стабилизированных координат.Операторы направления вращения вектора /, Л
координаты X угла J (J 1
22 управления по алгоритму (2) и выдаются на сумматоры-вычитатели 8-13 Содержимое счетчиков 14 ((), 15 (q; и 16 (QJ) по счетным импульсам с блока -22 сводится к нулю в соответствии с алгоритмом (3).
В блоке 1 поворота вектора в соответствии с алгоритмом (1) аналогично вычисляются стабилизированные , у , Z . При сведении
5 2, 3) к нулю по сигналам с первргр,. Bjroporo и третьего дешифраторов 17-19 прекращается формирование оператора и выдача счетных импульсов на соответствующий счетчик угла. При (f Qi-qi 0 все операторы принимают нулевые значения и. этап стабилизации координат заканчиваются. Стабипизирован- ные координаты остаются в первом, третьем и пятом регистрах 2, 4, 6 и являются начальными данными для этапа стабилизации углов. Этап стабилизации углов выполняется так же, как и режим Наведение, за два цикла.,
В первом цикле блок 22 управ- .ления вьфабатывает оператор Л , ч. и вычисляется с габилизированньй уго aif. ПриЛ1 , 0 координата z;, Js остается без изменения, координата у. при , Ли sign у сводится к нулю и при у;, 0, х,, р. Число итерации, подсчитываемое во втором счетчике 15 (число квантов,-2 ), при у, 0 дает стабилизированный уголЫ. . Во втором цикле оператор , 1 sign X, , О При этом координата , О остается
,г Л, ,,вьфабатываются i блок
5
0
без изменения, а координата х сводится к нулю. Число итерации, подсчитываемое в первом счетчике 14, при х, 0 дает стабилизированный угол fl. Момент окончания отработки координат,х и у опреде- ляется четвертым и пятым дешифраторами 20 и 21, фиксирующими их нулевые значения. Далее процесс повторяется для новых значений углов q, Q, Q) .
На фиг.2 приведены следующие обозначения:
И - потенциал режима Наведение J
С - потенциал режима Стабилизация ;
Н - потенциал наведения по углу oi-,
Нп - потенциал наведения по углу ,
потенциах стабилизации по углу Di;
CQ - потенциал стабилизации по 5 углу PI;
ТИ, Р,. РИ - синхросерия, сигнал запуска и распределенные импульсЫ; соответственно, поступающие в блок управления по входу 29j 0 ДШ 17-21 - сигнапы, поступающие с дешифраторов t7-21j
Синхр БП - группа тактовых выходов;
±1 счетные импульсы, вьщавае- ;. мые на счетчики 14-16;
Л - шина операторов направления вращения.
По выходу Сйнхр. БП в блок 1 поворота векто ра вьдаются сигналы:
строб записи кода операции (режима работы) в регистр 32, по которому производится перезапись начальных данных из регистров 3,.5 и 7 в регистры 2, 4 и 6i
сигнал обнуления регистров 3 и 5 и записи единицы в регистр 7, вьфа- батываемьй на элементе И 39 в подготовительной стадии режима Наве0
5
дение,
У
сигнал записи координат х , z в регистры 3, 5 и 7, вьфабатывае- мьй на элементе И 35 в последней итерации режима Наведение ;
сигнал сдвига информации в регистрах 2, 4 и 6, вьфабатьшаемьй на элементе И 45 по потенциалу Работа (Р).
После занесения кода режима во второй регистр 32 по сигналу Раболяющии первый
ла Р . Режим наведения
та (Р), поступающему по входу 28, включается первый триггер 40, По потенциалу Р в режиме Наведение через седьмой элемент И 42 импульсом РИ, соответствующим началу итерации, включается третий триггер 46, формирующий потенциал hj5. : После отработки угла р по сигналу ДШ 17 в . конце итерации восьмым элементом И 43 выключается третий триггер 46, нулевым выходом которого в пятый триггер 49 потенциала h оС записывается 1, После отработки угла oi по сигналу ДШ 18 в конце итерации одиннадцатым элементом,И 50 выключается пятый триггер 49, обну- триггер 40 потенциа- окончен. На выходе 30 выставляется потенциал Готов.
В режиме Стабилизация вычислительный процесс этапа стабилизации координат управляется cйгнaлa ш Х и ±1, вырабатываемыми в шифраторе в 48 по потенциалам с 1, cct 0 и с в О. После вычисления стабилизированных координат (q,, Q, 0, (.,0) через первый и четвертый элементы И 33, И 36 в начале итерации включается второй триггер 41 потенциала cci. После отработки угла oi по сигналу ДШ 20 (у; 0) в конце итерации выключается через второй элемент И 34 второй триггер 41, включающий четвертьм триггер 47. Потенциал свб снимается, и включается потенциал сВ. В конце последней итерации отработки угла ft (х. 0) через девятьш элемент И 44 выключается четвертьй триггер 47 и через пятый элемент И 37 обнуляется первьй триггер 40. Потенциал Работа (Р ) снимается, вычисления окончены, на выходе 30 выставляется потенциал Готов. По выходам 26 и 27 вьщают- ся углы и d .
Сигналы с первого, второго и тре- тьег6 дешифраторов 17-19 и знаки кО
1460720 8
ординат X, у записываются в первый и третий регистры 31 и 38 соответственно перед началом итерации.
5
0
5
0
5
0
5
Формула изобретения
Устройство для преобразования координат по авт. св. № 1403062, отличающееся тем, что, с целью расширения класса решаемых задач путем обеспечения возможности стабилизации параметров вектора, в него дополнительно введены третий, четвертый и пятьй регистры и четвертый и пятый дешифраторы, причем выходы первого и второго регистров соединены с входами соответственно четвертого и пятого дешифраторов, выходы KOTOpbtx соединены с входом признака нулевых аргументов блока управления, выходы знаковых разрядов первого и второго регистров соединены с входом анализа знака аргумента блока управления, выходы четвертого, пятого, шестого сумма- торов-вычитателей соединены с информационными входами соответственно третьего, четвертого и пятого регистров, выходы которых соединены с информационными входами соответственно первого, второго и третьего регистров, первьй тактовый выход блока управления соединен с входом синхронизации первого, второго, третьего регистров, второй тактовьй выход блока управления соединен с входом синхронизации записи четвертого, пятого и шестого регистров, третий тактовьй выход блока управления соединен с входами сброса четвертого, пятого и шестого регистров, вход режима блока управления соединен с одноименным входом устройства, выходы стабилизированных углов которого соединены с выходами соответственно первого и второго счетчиков.
Sign C f4-f6
r
A Физ.2
Ш17
Ш
1
5J
(7
-I AC
C
4
56
59
5-1
Щиг.З
LI
/ -
УО
X
«««««H
Л
лг
56
57
S2
65
ICvl
| Авторское свидетельство СССР № 4119282, кл | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
