Ё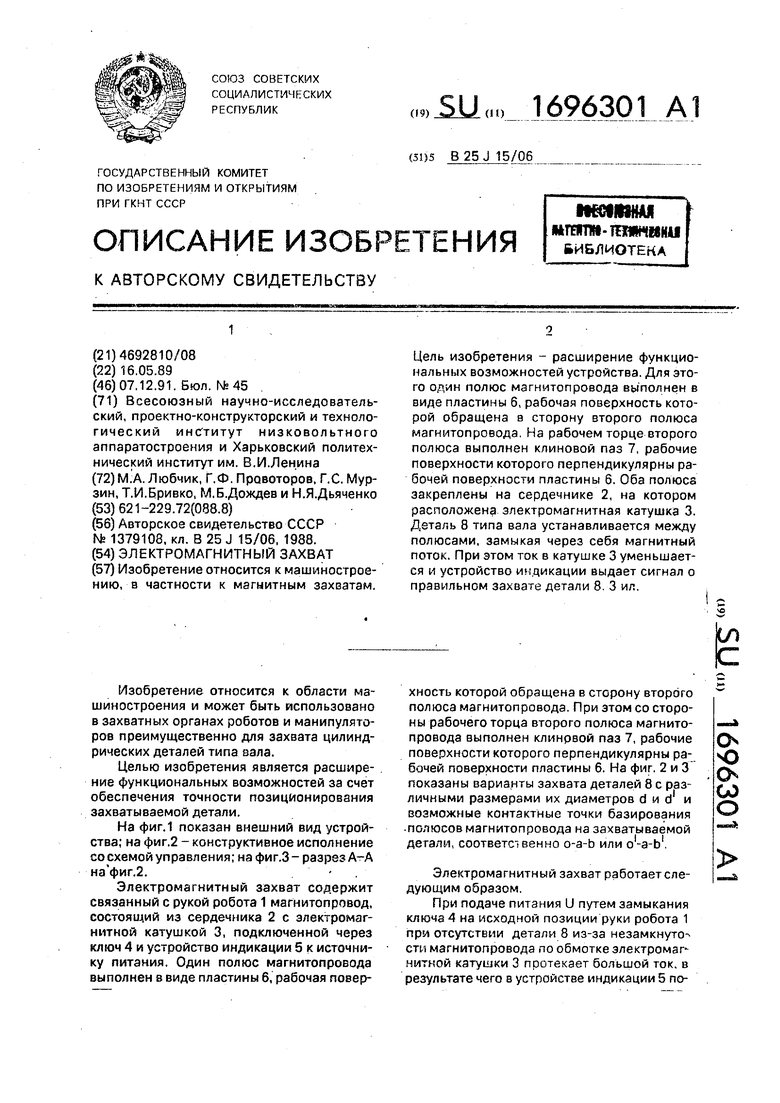
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный самоустанавливающийся схват | 1990 |
|
SU1805033A1 |
| Захватное устройство для мягких деталей | 1990 |
|
SU1811482A3 |
| Электромагнитный захват | 1986 |
|
SU1440708A1 |
| Многопозиционный электромагнитный захват | 1990 |
|
SU1726241A1 |
| Магнитный схват | 1990 |
|
SU1812103A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Магнитный схват | 1990 |
|
SU1811484A3 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| Захватное устройство для мягких деталей | 1991 |
|
SU1779583A1 |
| Схват | 1990 |
|
SU1811477A3 |
Изобретение относится к машиностроению, в частности к магнитным захватам. Цель изобретения - расширение функциональных возможностей устройства Для этого один полюс магнитопровода выполнен в виде пластины 6, рабочая поверхность которой обращена в сторону второго полюса магнитопровода На рабочем торце второго полюса выполнен клиновой паз 7, рабочие поверхности которого перпендикулярны рабочей поверхности пластины 6 Оба полюса закреплены на сердечнике 2, на котором расположен электромагнитная катушка 3 Деталь 8 типа вала устанавливается между полюсами, замыкая через себя магнитный поток. При этом ток в катушке 3 уменьшается и устройство индикации выдает сигнал о правильном захвате детали 8 3 ил
Изобретение относится к области машиностроения и может быть использовано в захватных органах роботов и манипуляторов преимущественно для захвата цилиндрических деталей типа зала.
Целью изобретения является расширение функциональных возможностей за счет обеспечения точности позиционирования захватываемой детали.
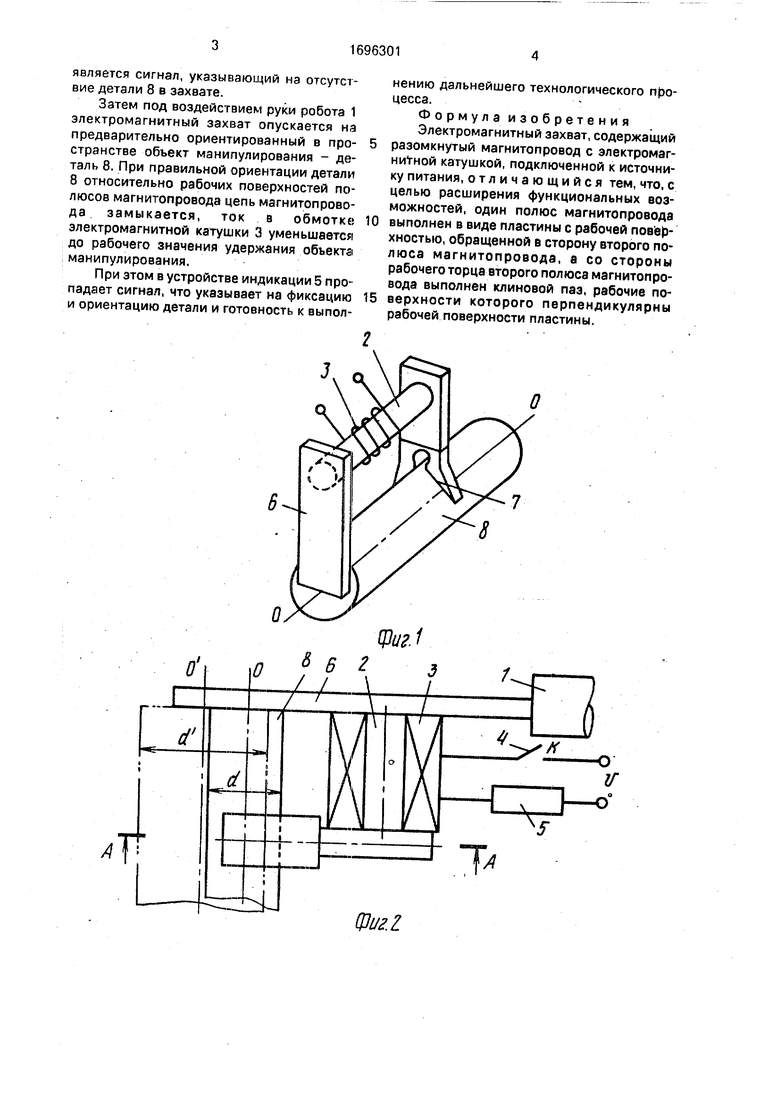
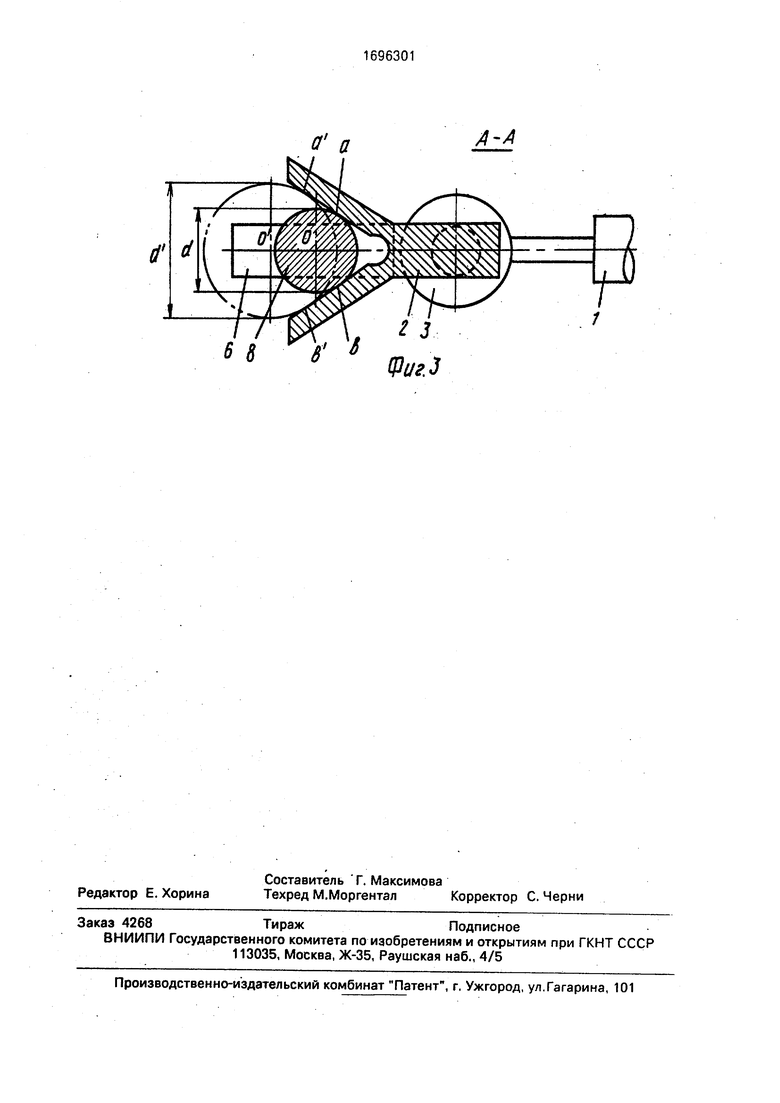
На фиг.1 показан внешний вид устройства, на фиг.2 - конструктивное исполнение со схемой управления; на фиг.З-разрез А-А на фиг.2.
Электромагнитный захват содержит связанный с рукой робота 1 магнитопровод, состоящий из сердечника 2 с электромагнитной катушкой 3, подключенной через ключ 4 и устройство индикации 5 к источнику питания. Один полюс магнитопровода выполнен в виде пластины 6, рабочая поверхность которой обращена в сторону второго полюса магнитопровода При этом со стороны рабочего торца второго полюса магнитопровода выполнен клинрвой паз 7, рабочие поверхности которого перпендикулярны рабочей поверхности пластины 6 На фиг 2 и 3 показаны варианты захвата деталей 8 с различными размерами их диаметров d и d и возможные контактные точки базирования полюсов магнитопровода на захватываемой детали, соответственно о-a-b или o-a-b
Электромагнитный захват работает следующим образом.
При подаче питания U путем замыкания ключа 4 на исходной позиции руки робота 1 при отсутствии детали 8 из-за незамкнуто-- стм магнитопровода по обмотке эле тромаг ниткой катушки 3 протекает большой ток, в результате чего а устройстве индикации 5 поО
ю о со о
является сигнал, указывающий на отсутствие детали 8 в захвате.
Затем под воздействием руки робота 1 электромагнитный захват опускается на предварительно ориентированный в пространстве обьект манипулирования - деталь 8. При правильной ориентации детали 8 относительно рабочих поверхностей полюсов магнитопровода цепь магнитопрово- да замыкается, ток в обмотке электромагнитной катушки 3 уменьшается до рабочего значения удержания объекта манипулирования.
При этом в устройстве индикации 5 пропадает сигнал, что указывает на фиксацию и ориентацию детали и готовность к выпол0
5
нению дальнейшего технологического процесса.
Ф о р м у л а и з о б р е т е н и я Электромагнитный захват, содержащий разомкнутый магнитопровод с электромагнитной катушкой, подключенной к источнику питания, отличающийся тем, что, с целью расширения функциональных возможностей, один полюс магнитопровода выполнен в виде пластины с рабочей поверхностью, обращенной в сторону второго по- люса магнитопровода, а со стороны рабочего торца второго полюса магнитопровода выполнен клиновой паз, рабочие поверхности которого перпендикулярны рабочей поверхности пластины.
Фиг2
А-А
| Электромагнитный захват | 1986 |
|
SU1379108A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
