Изобретение относится к станкостроению, конкретно к производству высокоточных шпиндельных узлов.
Известен способ дуплексации подшипников качения по схеме 0-дуплекс и X- дуплекс путем установки дистанционных колец разной толщины между наружными и внутренними кольцами подшипников, по которому нагружают одну из пар когец подшипников и дистанционное кольце между ними осевым усилием, равным усилию их монтажного нагружения в узле, смещают другое дистанционное кольцо посредством динамометра последовательно в нескольких радиальных направлениях, расположенных не более чем через 120°, контролируя отклонение величины фактического усилия перемещения кольца от его регламентированного значения, определенного для эталонно сдуплексированных подшипников, и по величине среднего отклонения подбирают дистанционные кольца с разницей по толщине, обеспечивающей регламентированную величину усилия перемещения. При этом при дуплексации по схеме 0-дуплекс нагружают внутреннюю пару колец подшипников и дистанционное кольцо между ними, после чего сдвигают наружное дистанционное кольцо, а по схеме Х-дуплекс нагружают наружную пару колец подшил VIСО
ел о
GJ
никое и дистанционное кольцо между ними, после чего сдвигают внутреннее дистанционное кольцо.
К недостаткам известного способа следует отнести невозможность получения предварительного натяга при комплектации трех и более подшипников качения высокоточных шпиндельных узлов.
Широкое применение в шпинделях токарных, фрезерных и многоцелевых станков нашли комплекты строенных радиально- упорных подшипников по схеме тандем-0. Частоту вращения этих шпиндельных узлов характеризует параметр быстроходности d п (5-7)- 10 мм- мин . Такие высокие показатели удается достигнуть лишь при условии точного распределения нагрузки между телами качения всех подшипников.
Цель изобретения - оптимизация по точности, быстроходности, долговечности и жесткости при комплектации трех и более подшипников.
Поставленная цель достигается тем, что в способе дуплексации подшипников качения по схеме 0-дуплекс и Х-дуплекс. включающем операции установки дистанционных колец разной толщины между наружными и внутренними кольцами подшипников, при котором нагружают одну из пар колец подшипников и дистанционное кольцо между ними осевым усилием, равным усилию их монтажного нагружения в узле, смещают другое дистанционное кольцо посредством динамометра последовательно в нескольких радиальных направлениях, расположенных не более чем через 120°, контролируя отклонение величины фактического усилия перемещения кольца от его регламентированного значения, определенного для эталонно сдуплексирован- ных подшипников, и по величине среднего отклонения подбирают дистанционные кольца с разницей по толщине, обеспечивающей регламентированную величину усилия перемещения, и при этом в случае дуплексации по схеме 0-дуплекс нагружают внутреннюю пару колец подшипников и дистанционное кольцо между ними, а затем сдвигают наружное дистанционное кольцо, а в случае дуплексации по схеме Х-дуплекс нагружают наружную пару колец подшипников и дистанционное кольцо между ними, после чего сдвигают внутреннее дистанционное кольцо.
Сначала дуплексируют подшипники по одной из требуемых упомянутых схем, после чего устанавливают по схеме тандем последующие подшипники и дистанционные кольца между ними и в образованном комплекте нагружают внутренние подшипниковые и дистанционные кольца для схемы 0-дуплекс и наружные-для схемы Х-дуплекс осевым усилием, равным усилию их монтажного нагружения в узле, а затем смещают посредством динамометра другие дистанционные кольца комплекта, входящего в схему тандем, и подбирают разнотол- щинность наружного и внутреннего колец так, что фактическое усилие Р смещения
каждого кольца равняется его расчетному значению, определенному по формуле
15
где Рэ - эталонное усилие смещения дистанционного кольца сдуплексированной пары подшипников.
п - количество подшипников, установ0 ленных по схеме тандем в одну сторону.
Получение предварительного натяга в комплекте подшипников качения с контролем фактического усилия смещения по его расчетному значению, определенному для
5 эталонно натянутых подшипников, позволяет обеспечить работу каждого комплекта в оптимальных условиях и равномерное распределение нагрузки между телами качения подшипников, установленных по схеме
0 тандем.
На прилагаемых чертежах в качестве примера изображен способ получения предварительного натяга в комплекте из пяти подшипников качения по схеме 0-дуп5 леке с установкой с одной стороны 2-х, а с другой стороны 3-х подшипников по схеме тандем .
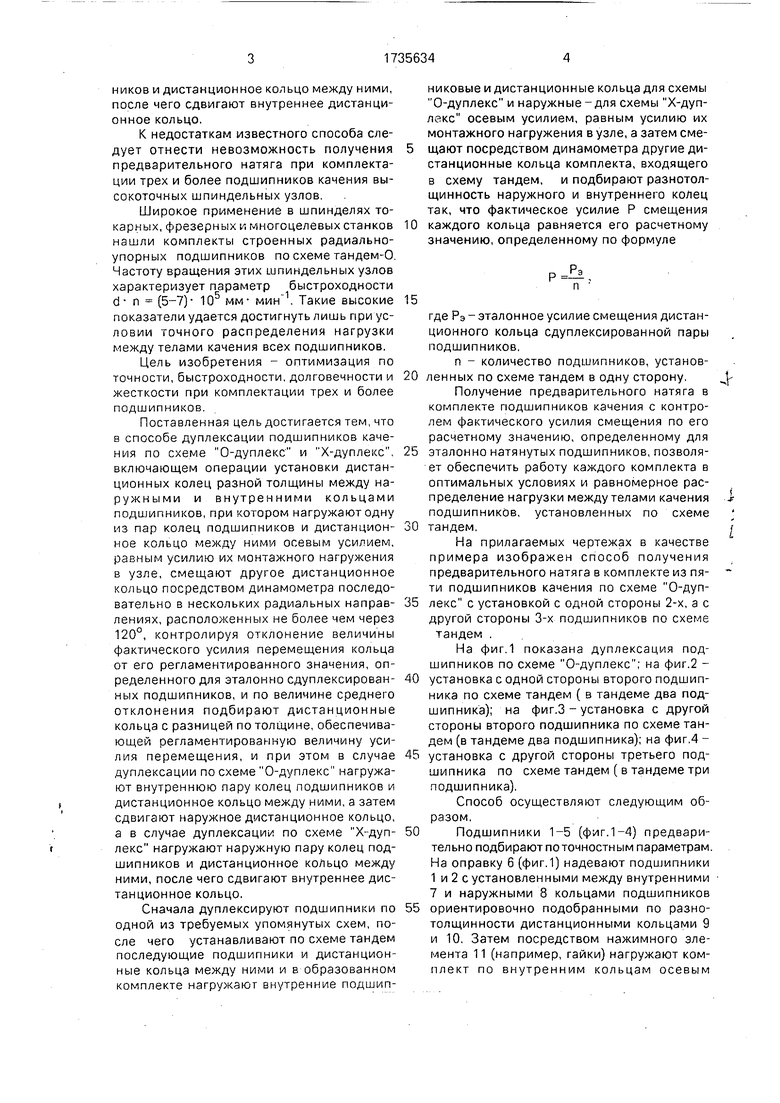
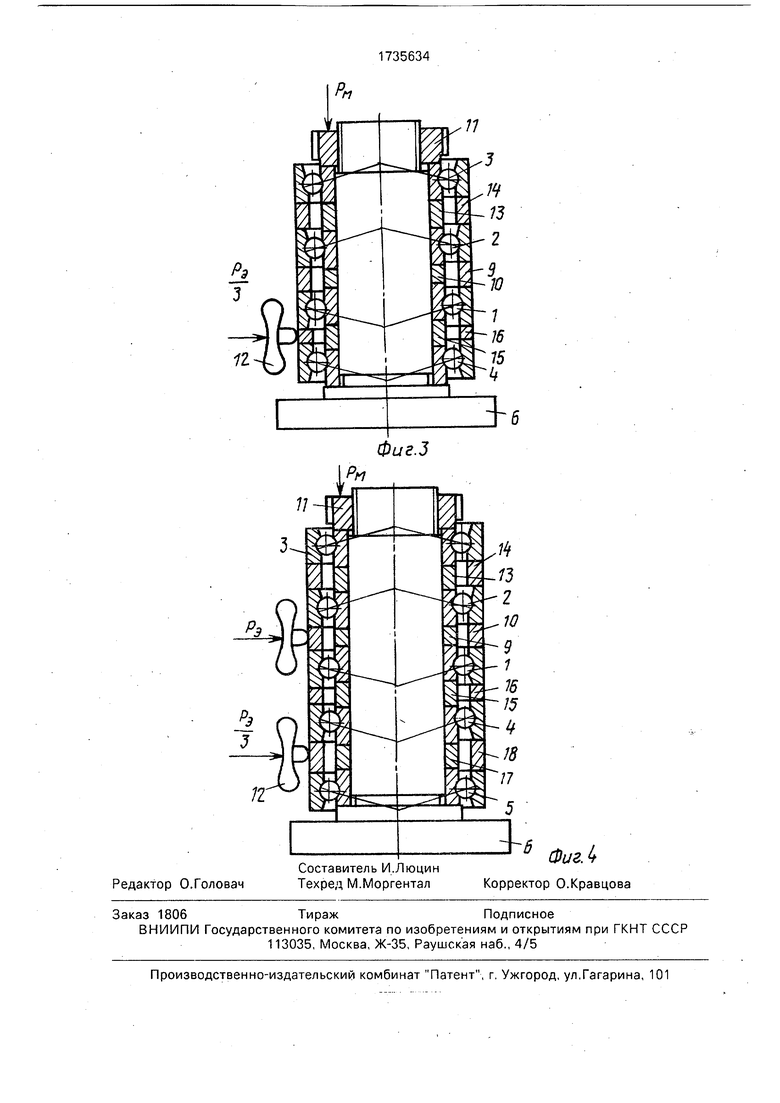
На фиг.1 показана дуплексация подшипников по схеме 0-дуплекс ; на фиг.2 0 установка с одной стороны второго подшипника по схеме тандем ( в тандеме два подшипника); на фиг.3 - установка с другой стороны второго подшипника по схеме тандем (в тандеме два подшипника); на фиг.4 5 установка с другой стороны третьего подшипника по схеме тандем ( в тандеме три подшипника).
Способ осуществляют следующим образом,
0Подшипники 1-5 (фиг.1-4) предварительно подбирают по точностным параметрам. На оправку 6 (фиг.1) надевают подшипники 1 и 2 с установленными между внутренними 7 и наружными 8 кольцами подшипников
5 ориентировочно подобранными по разно- толщинности дистанционными кольцами 9 и 10. Затем посредством нажимного элемента 11 (например, гайки) нагружают комплект по внутренним кольцам осевым
4I
усилием Рм, равным усилию их монтажного нагружения в узле. К наружному дистанционному кольцу с помощью динамометра 12 прикладывают усилие в нескольких радиальных направлениях, расположенных не более чем через 120°, и контролируют отклонение величины фактического усилия, необходимого для начала перемещения кольца 10 от его регламентированного значения Рэ, которое определено для эталонно предварительно натянутого комплекта. Затем по величине среднего отклонения подбирают из аттестованного набора колец дистанционное кольцо по толщине, обеспечивающей регламентированную величину усилия перемещения, равную РЭ.
Затем (фиг.2) устанавливают на оправку 6 с одной стороны подшипник 3 по схеме тандем с второй парой внутренних 13 и наружных 14 дистанционных колец и нагружают комплект по внутреннем кольцам осевым усилием Рм нажимным элементом 11. Далее посредством динамометра 12 смещают кольцо 14 в радиальном направлении и контролируют фактическое усилие, необходимое для начала перемещения, прикладываемое в нескольких радиальных направлениях, расположенных не более чем через 120°. По величине фактического усилия определяют его отклонение от расчетного значения Р, определенного по формуле Р Рэ/п при п 2(количество подшипников, установленных по схеме тандем).
Затем по величине среднего отклонения подбирают из аттестованного набора колец дистанционное кольцо по толщине, обеспечивающей регламентированную величину усилия перемещения, равную Рэ/2.
Для подшипников 4 и 5 (фиг.З и 4) расчетное усилие Р определяют по формуле Р
Рэ , так как с другой стороны по схеме
О
тандем установлены три подшипника 1,4 и 5.
Подбор дистанционных колец 15 и 16 (фиг.З) и 17 и 18 (фиг.4) по разнотолщинно- сти производится аналогично подбору колец 9, 10 и 13, 14.
В окончательно собранном комплекте (фиг.4) усилие перемещения кольца 10 должно оставаться равным Рэ
Эталонно предварительно натянутый комплект подшипников т.е. собранный с
экспериментально найденным оптимальным усилием предварительного натяга, удовлетворяет требованиям по допустимой температуре нагрева и необходимой для
процесса резания жесткости, а также по долговечности сохранения точности и быстроходности.
Технические преимущества предлагаемого способа по сравнению с известным
заключаются в достижении оптимизации по точности, быстроходности, долговечности и жесткости подшипников за счет исключения погрешностей измерения и изготовления дистанционных колец.
Общественно полезные преимущества,
производные от технических, заключаются в повышении точности обработки посредством шпиндельного узла, собранного на подшипниковых опорах согласно способа.
Формула изобретения
Способ создания предварительного натяга в комплекте подшипников качения, включающий дуплексацию подшипников по схеме 0-дуплекс и Х-дуплекс путем установки дистанционных колец разной толщины между кольцами подшипников, нагружения их монтажным усилием и контроля фактического усилия смещения дистанционного кольца, отличающийся
тем, что, с целью повышения быстроходности, жесткости и точности при комплектовании и более подшипников, перед нагружением устанавливают по схеме тандем последующие подшипники и дистанционные кольца между ними и в образованном комплекте нагружают внутренние подшипниковые и дистанционные кольца для схем 0-дуплекс и наружные-для схемы Х-дуплекс осевым усилием, равным усилию их
монтажного нагружения в узле, а затем смещают посредством динамометра другие дистанционные кольца комплекта, входящие в схему, с усилием смещения каждого кольца, равным
п
где Рэ - эталонное усилие смещения дистан- ционного кольца сдуплексированной пары подшипников;
п - количество подшипников, установленных по схеме тандем в одну сторону.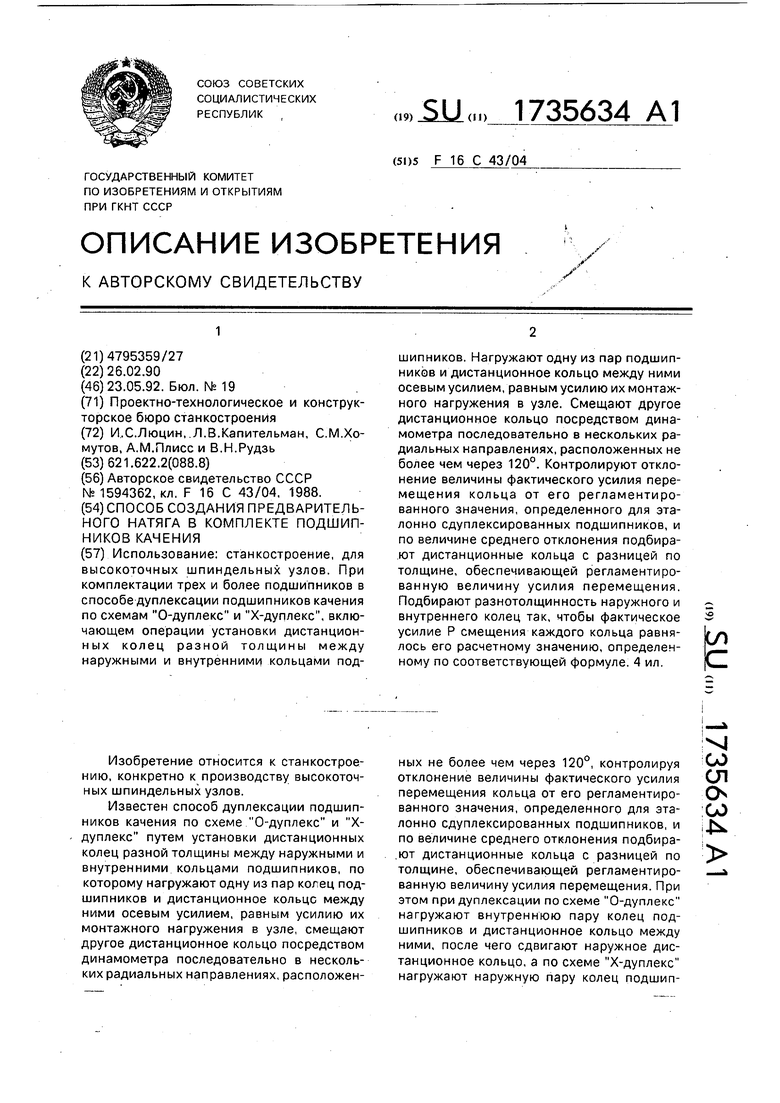
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дуплексации подшипников качения по схемам "О-дуплекс" и "Х-дуплекс | 1988 |
|
SU1594362A1 |
| Способ дуплексации подшипников качения | 1990 |
|
SU1770628A1 |
| Способ контроля правильности подбора подшипников в комплекты | 1990 |
|
SU1775633A1 |
| Способ дуплексации подшипников качения | 1977 |
|
SU838133A1 |
| Устройство для дуплексации подшипников качения | 1989 |
|
SU1698671A1 |
| Способ сборки подшипников качения по схеме Т-дуплекс | 1988 |
|
SU1594304A1 |
| Способ дуплексации шарикоподшипников | 1978 |
|
SU767420A1 |
| Способ комплектования деталей для сборки шарикоподшипников | 1979 |
|
SU855269A1 |
| Устройство для измерения величины осевого смещения торцов колец подшипников при дуплекации | 1981 |
|
SU997517A1 |
| Устройство для контроля подшипников качения | 1990 |
|
SU1751654A1 |
Использование: станкостроение, для высокоточных шпиндельных узлов. При комплектации трех и более подшипников в способе дуплексации подшипников качения по схемам 0-дуплекс и Х-дуплекс, включающем операции установки дистанционных колец разной толщины между наружными и внутренними кольцами подшипников. Нагружают одну из пар подшипников и дистанционное кольцо между ними осевым усилием, равным усилию их монтажного нагружения в узле. Смещают Другое дистанционное кольцо посредством динамометра последовательно в нескольких радиальных направлениях, расположенных не более чем через 120°. Контролируют отклонение величины фактического усилия перемещения кольца от его регламентированного значения, определенного для эталонно сдуплексированных подшипников, и по величине среднего отклонения подбирают дистанционные кольца с разницей по толщине, обеспечивающей регламентированную величину усилия перемещения. Подбирают разнотолщинность наружного и внутреннего колец так, чтобы фактическое усилие Р смещения каждого кольца равнялось его расчетному значению, определенному по соответствующей формуле. 4 ил. ё
Фиг.1
11
Фиг.1
Редактор О.Головач
Составитель И.Люцин Техред М.Моргентал
11
Фиг.З
Фиг.Ь
Корректор О.Кравцова
| Способ дуплексации подшипников качения по схемам "О-дуплекс" и "Х-дуплекс | 1988 |
|
SU1594362A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
