13
Изобретение относится к машиностроению и может бить использовано в качестве схватов промыпшениых роботов и манипуляторов.
Цель изобретения - упрощение кон- струкции и повышение точности центрирования захватываемых деталей относительно схвата.
На фиг,1 представлен схват манипу- лятора на фиг,2 - схема, иллюстрирующая закон изменения профиля второй губки.
Схват манипулятора содержит корпус 1, в котором расположен привод, вьс- полненный в виде пневматического ци- линдра 2 с крышкой 3,, во внутренней полости которого расположен подпружиненный пружиной 4 поршень 5 со штоком 6 с внутренней призмой 7 на конце. Полость 8 цилиндра соединена с атмосферой отверстием 9 в корпусе 1, а полость 10 - с электропневмоклапа- ном 11 при помощи линии 12 подачи воздуха. Электропневмоклапан 11 соединен с линией 13 подачи воздуха под давлением и атмосферой Губки 14 и 15 схвата имеют общую ось 16 вращения, закрепленную в корпусе. На концах губок выполнены ролики 17 и 18, взаимодействующие с внутренней приз- мой 7„ Губки подпружинены пружиной 19. Губка 14 выполнена прямолинейной а губка 15 имеет прямолинейный 20 и профилированный 21 участки,
Схват манипулятора работает еле- дующим образом.
После позиционирования руки манипулятора к захватываемой детали подается сигнал управления на электро-- пневмоклапан 1 1, который соединяет подпоршневую полость 10 с линией 13 подачи воздуха под давлением линией 12. Поршень 5 со штоком 6 приходит п движение, сжимая пружины 4 и 19 и
стравливая воздух из надпоршневой по
732
лости 8 через отверстие 9. При этом внутренняя призма 7 взаимодействует с роликами 17 и 18 и придает вращательное движение губкам 14 и 15 вокруг оси 16. Движение осуществляется до контакта губок 14 и 15 с захватываемой деталью.
После снятия управляющего сигнала с злектропневмоклапана 11 подпоршне- вая полость 10 соединяется с атмо- сф«;рой. Под дейстЕ1ием пружины 4 поршень 5 со штоком 6 начинает движение При этом под действием пружины 19 губки 14 и 15 разжимаются, освобожда деталь.
Формула изобретения
Схват манипулятора для цилиндрических деталей, содержащий корпус с пр1тодом, связаиньм с зажимными губками, отличающийся тем, что, с целью упрощения конструкции и повышения точности центрирования захватываемых деталей относительно схвата, губки схвг.та расположены на общей оси вращения, причем одна из губок выполнена прямолинейной, а другая имеет прямолинейный участок, при лежащ1Ш к оси вращения, и следующий за ним участок, спрофилированньй по закону
-5 20
35
45
1 + I V ,sin2A( Yl+cos;( +t 1 - созЛ),
где L - расстояние от оси вращения
губок до пентра позиционирования деталей, равное длине прямолинейного участка про- филировань:ой губки;- Д - угол между прямолинейным участком губки и прямой, соединяющей ось вращения губок и точку профиля, удаленную от оси вращения на величину Н.
в
фие.2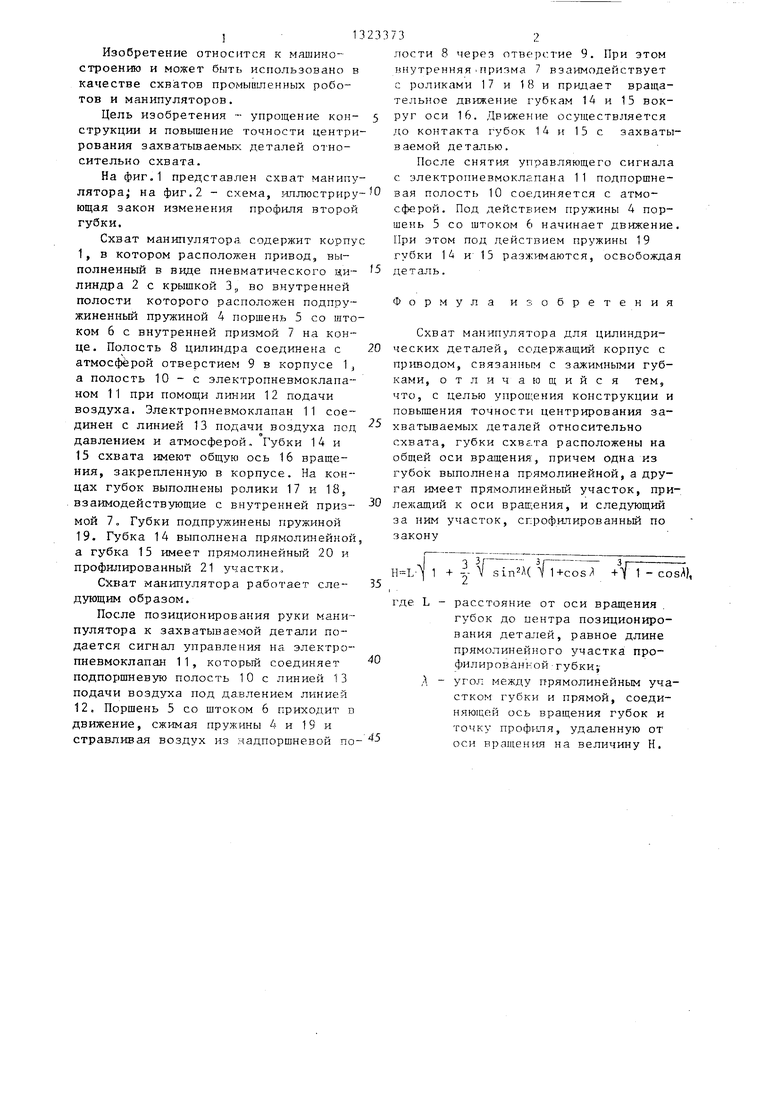
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват робота | 1986 |
|
SU1366392A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Пневматический сборочный схват | 1985 |
|
SU1404230A1 |
| Схват | 1987 |
|
SU1407796A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| Схват манипулятора | 1985 |
|
SU1255427A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1794642A1 |
| Схват манипулятора | 1983 |
|
SU1071421A1 |
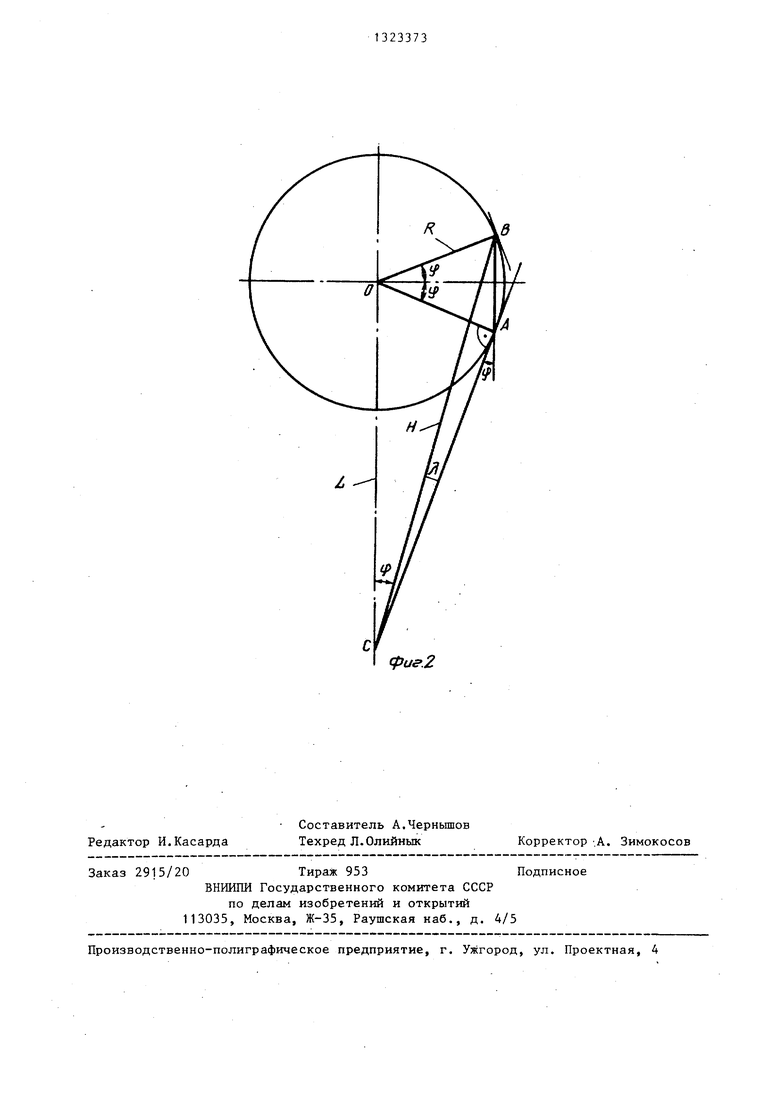
Изобретение относится к области машиностроения и может быть использовано в качестве схватов промышленных роботов и манипуляторов. Цель изобретения - упрощение конструкции и повышение точности центрирования деталей при захвате за счет профилирования поверхностей губок. Схват содержит корпус 1 с расположенным в нем пневмоприводом, на штоке которого выполнена призма 7, взаимодействукзщая с роликами 17 и 18 губок 14 и 15. Губки 14 и 15 расположены на оси вращения 16 и подпружинены между собой пружиной 19. Губка 14 выполнена прямолинейной, а губка 15 имеет прямолинейный участок 20 и профилированный участок 21. 2 ил. / 77 18 7 21 0 15 74 6 9 8 4 Z сл со to со 00 со 7/ ZrR /JФиг. /
Редактор И.Касарда
Составитель А.Чернышев Техред Л.Олийнык
Заказ 2915/20Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А. Зимокосов
| Грузозахватное устройство | 1979 |
|
SU812571A1 |
