Изобретение относится к машиностроению и может быть использовано в гибких производственных системах.
Целью изобретения является упрощение конструкции и повышение производительности роботизированного технологического комплекса.
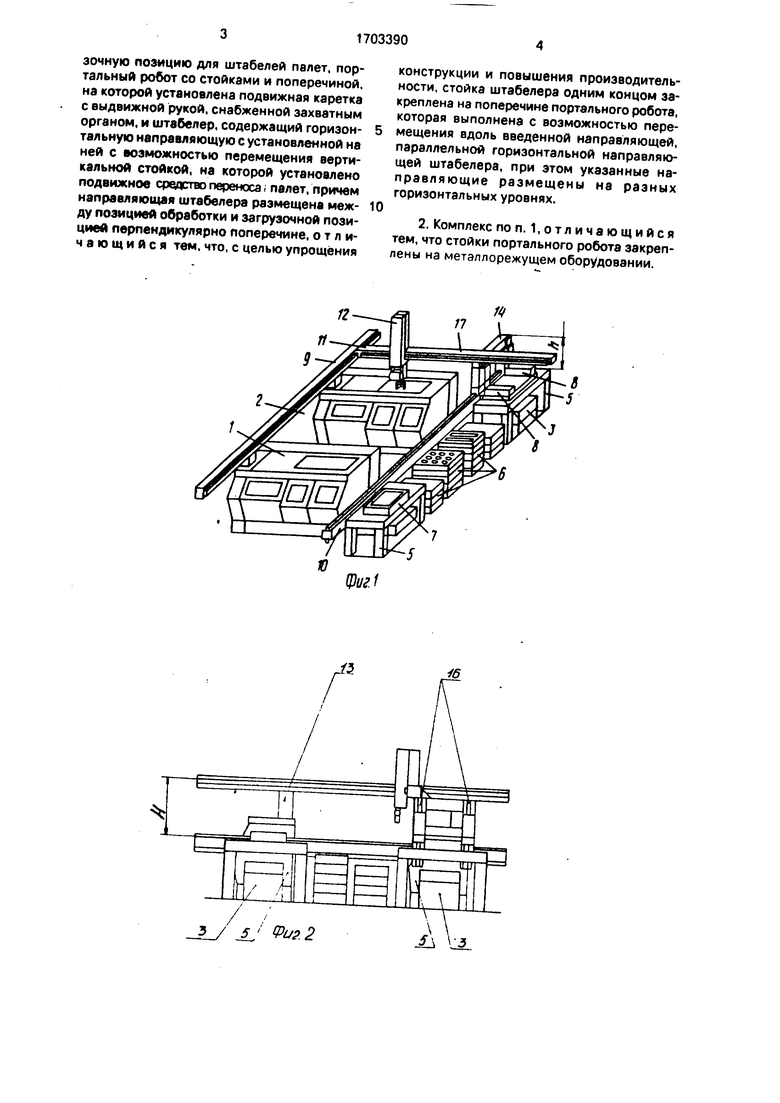
На фиг. 1 показан общий вид комплекса; на фиг. 2 - вид сбоку; на фиг. 3 - вид спереди; на фиг. 4 - сечение А-А на фиг. 3.
Комплекс содержит металлорежущее оборудование 1,установленное на позиции 2 обработки, транспортер 3 для удаления стружки, загрузочную позицию 4 со столами 5 и штабелями 6 палет 7. Штабелер 8 предназначен для разборки штабелей 6 и для переноса палет 7 на столы 5. На направляющих 9, 10 перемещается поперечина 11с выдвижной рукой 12, установленной на поперечине 11 посредством подвижной каретки. Направляющая 9 установлена на стойках 13, которые могут быть закреплены на металлорежущем оборудовании 1. Поперечина 1 1 жестко связана с вертикальной стойкой 14 штабелера 8, которая с помощью каретки 15 перемещается по направляющей 10. Стойка 14 снабжена направляющими 16, на которых установлено подвижное средство переноса палет. Поперечина 11 имеет консольный участок 17, расположенный на загрузочной позиции 4.
Роботизированный комплекс работает следующим образом.
Выдвижная рука 12 своим захватным органом переносит заготовки с загрузочной позиции 4 на позицию 2 обработки и обратно. Установка штабелера 8 на направляющей 10, расположенной между позицией обработки и загрузочной позицией 4, позволяет упростить подачу палет 7 в штабели 6.
Формула изобретения
1. Роботизированный технологический комплекс, содержащий позицию обработки с металлорежущим оборудованием, загруел С
vj О
GO СО Ю О
зочную позицию для штабелей налет, портальный робот со стойками и поперечиной, на которой установлена подвижная каретка с выдвижной рукой, снабженной захватным органон, и штабелер, содержащий горизонтальную направляющую с установленной на ней с возможностью перемещения вертикальной стойкой, на которой установлено подвижное средство переноса; палет, причем направляющая штабелера размещена между позицией обработки и загрузочной позицией перпендикулярно поперечине, отличающийся тем, что, с целью упрощения
конструкции и повышения производительности, стойка штабелера одним концом закреплена на поперечине портального робота, которая выполнена с возможностью перемещения вдоль введенной направляющей, параллельной горизонтальной направляющей штабелера, при этом указанные направляющие размещены на разных горизонтальных уровнях.
2. Комплекс по п. 1, отличающийся тем, что стойки портального робота закреплены на металлорежущем оборудовании.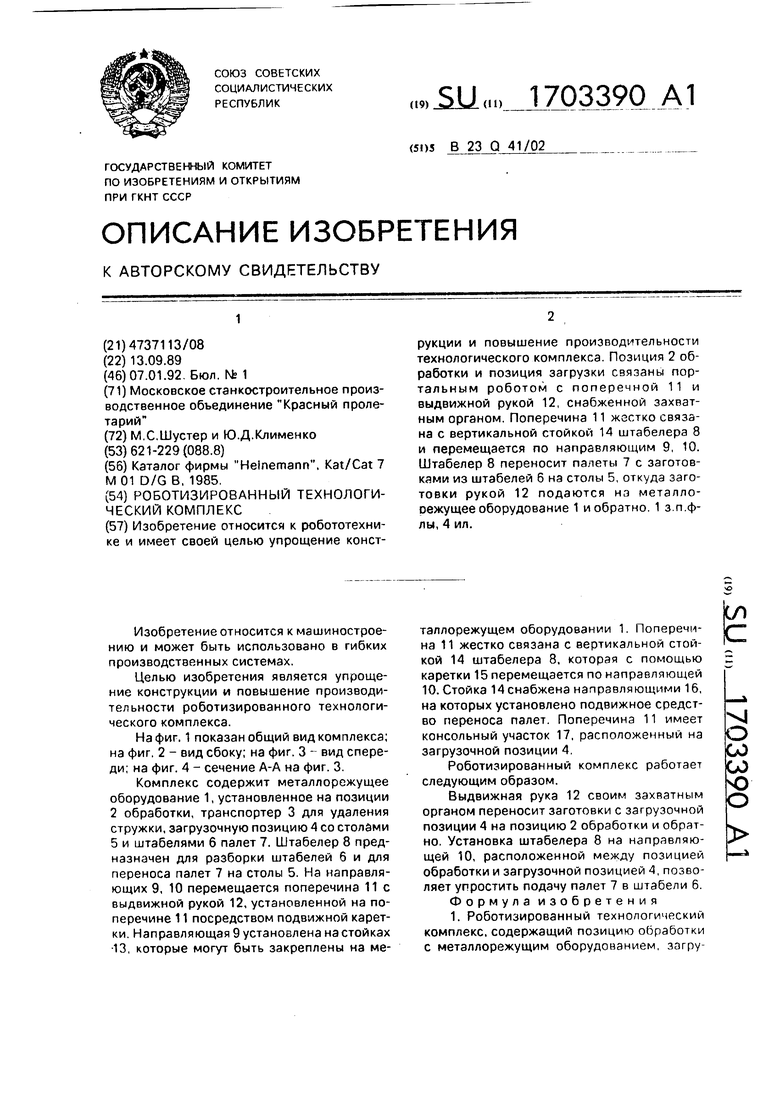
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий автоматизированный участок | 1987 |
|
SU1585118A1 |
| Роботизированный технологический комплекс | 1986 |
|
SU1532148A1 |
| Гибкая производственная система | 1988 |
|
SU1593916A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Гибкий автоматизированный участок | 1990 |
|
SU1812063A1 |
| Гибкий производственный модуль холодной листовой штамповки | 1986 |
|
SU1535665A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1569179A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Робототехнический комплекс | 1986 |
|
SU1458148A1 |

Изобретение относится к робототехнике и имеет своей целью упрощение конструкции и повышение производительности технологического комплекса. Позиция 2 обработки и позиция загрузки связаны портальным роботом с поперечной 11 и выдвижной рукой 12, снабженной захватным органом. Поперечина 11 жестко связана с вертикальной стойкой 14 штабелера 8 и перемещается по направляющим 9, 10. Штабелер 8 переносит налеты 7 с заготовками из штабелей 6 на столы 5, откуда заготовки рукой 12 подаются нэ металлорежущее оборудование 1 и обратно. 1 з.п.ф- лы, 4 ил.
Jti UL
ft10 M 5 Э J /S 4
LJ
Фиг. 4
| Каталог фирмы Heinemann, Kat/Cat 7 М01 D/G В, 1985. |
