Схват промышленного робота работает следующим образом.
При подходе охвата к захватываемой детали со сложным профилем происходит взаимодействие подпружиненных пальцев 3 с участками рельефа детали. При этом пальцы утапливаются в корпусе по резьбе, совершая вместе с магнитом 12 вращатель- но-поступательное движение, вызывая срабатывание магнитоуправляемых контактов горкомов 5.
Информация с датчиков поступает в блок управления 7, в котором определяется истинный образ детали по информации, хранящейся в памяти блока управления. При определении истинного образа детали, сформированного чувствительными элементами, блок управления выдает команду на привод перемещения губок.
Формула изобретения
1. Схват промышленного робота, содержащий корпус с установленными на нем губками, тактильные датчики, выполненные в виде подпружиненных утапливаемых
пальцев, один конец каждого из которых имеет возможность взаимодействия с деталью, а другой - с чувствительными элементами, соединенными с блоком
управления, который в свою очередь соединен с приводом губок, отличающийся тем, что, с целью упрощения конструкции и повышения надежности работы, утапливаемые пальцы установлены на корпусе схвата
между губками, при этом продольные оси пальцев параллельны продольной оси корпуса, причем корпус и каждый палец образуют соединение в виде несамотормозящейся резьбовой пары, а чувствительные
элементы каждого пальца установлены вокруг него на корпусе по винтовой линии.
2. Схват поп.1, отличающийся тем, что чувствительные элементы каждого пальца выполнены в виде герконов, а на пальце
с эксцентриситетом установлен постоянный магнит, имеющий возможность взаимодействия с герконами, при этом герконы имеют возможность переустановки вдоль оси пальца.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительный схват промышленного робота | 1988 |
|
SU1634489A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Схват промышленного робота | 1975 |
|
SU533478A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Адаптивный схват промышленного робота | 1985 |
|
SU1303403A1 |
| Адаптивный схват промышленного робота | 1979 |
|
SU872255A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Устройство для установки многовыводных радиоэлементов,преимущественно микросхем,на печатные платы | 1986 |
|
SU1457186A1 |
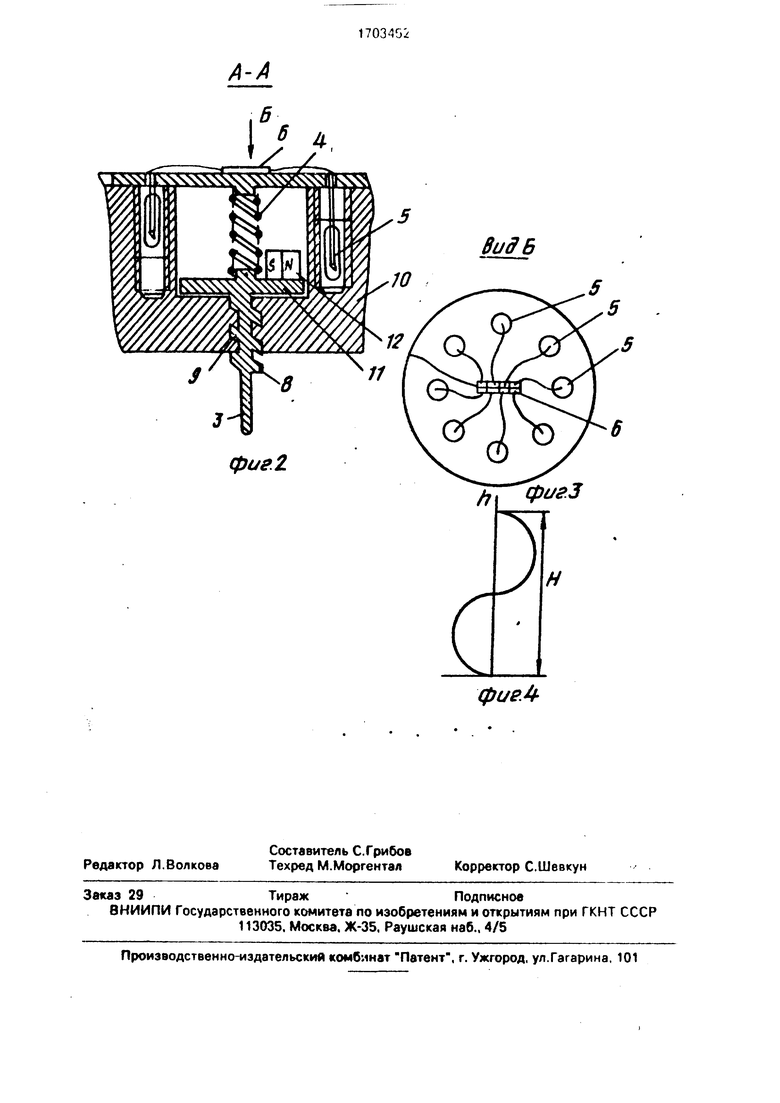
А-А
Вид В
фиеЛ
