Изобретение относится к позиционным системам числового программного управления (ЧМУ) станками, в частности, к устройствам для измерения линем- ных перемещений подвижного органа станка.
Ивестно устройство, которое является одним из основных узлов измерительном обратной связи станков с ЦПУ.
Известно vcTpo.icTBo для измерения линейных перемещении подвижного органа станка, солер отее роторный датчик, связанный реечной инпня.чричегкоч зубчатой передачей с подвижным органом станка при помоп(и упругой связи н направляющей, контактирующей с установленным на эксцентрике роликом для выборки зазоров в зубчатом зацеплении.
t
Недостатками известных устройств является то, что из-за неизбежных Технологических ошибок, возникаю.-тих при изготовлении и установке элементов устройства, не обеспечивается высокая точность измерения станка. Устройства сложны в изготовлении, наладке и трудС
о
с
N
мо обеспечить надежную за1чнту от строки.
Известно устройство, выбранное Л качестве прототипа, содержащее ро- ор- нын датчик, связаннмн реечной цилиндрической зубчатой передачей с подвнж- ным орг аном станка.
Однако это устройство ввиду зазора п зубчато - зацепле .;1Н и погрешности выставки зубчатой реГпш также не сбес печивает высокую точность. При возникновении смешений подписного оргянл на величину больше, чем зазор в зубчатой реечной передача, происходит не - допустимая деформация ш,и поломка элементов устройства .
Цель изобретения - повышение точности.
Сущность изобретения заключается в том, что в устройстве для измерения линейных перемещений Подвижного органа станка, содержащем роторный датчик связанный реечной цилиндрической зубчатой передачей с подписным органом станка, реечная цилиндрическая зубчатая передача снабжена люфтовыбираю янм механизмом. При этом рейка передачи выполнена косозубон н введена в зацеп10
j
п 2550214
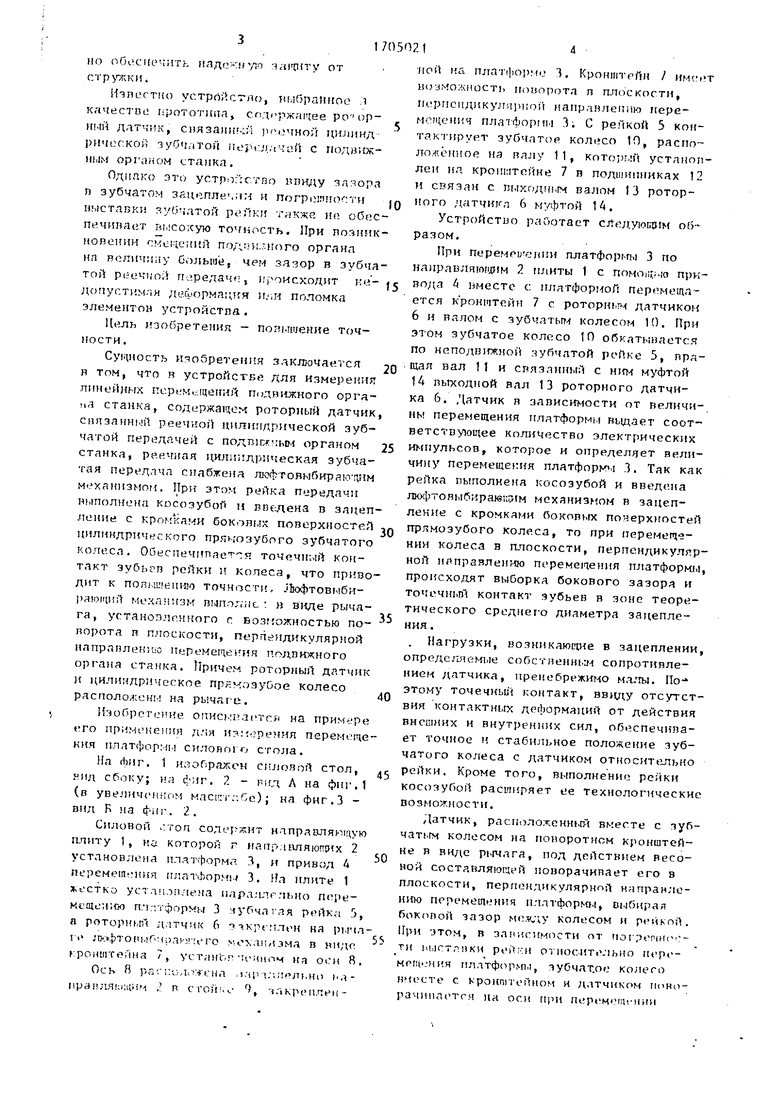
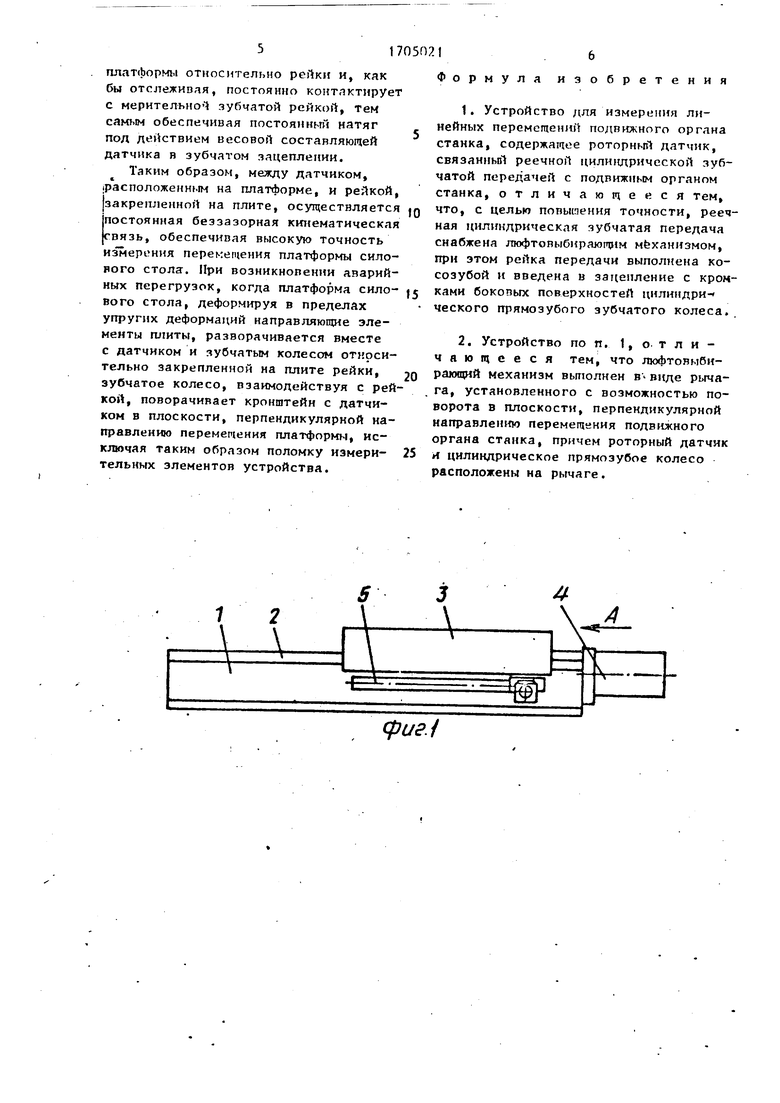
ной на платформе 3. Кронштейн 7 имеет возможность попорота л плоскости, перпендикулярной направлению перемещения платформы 3; С рейкой 5 контактирует зубчатое колесо 10, расположённое на валу 11, который установлен на кронштейне 7 в подшипниках 12 и связан с выходным валом 13 роторного датчика 6 муфтой 14.
Устройство работает следующим образом.
При перемещении платформы 3 по направляющим 2 плиты 1 с помощью привода 4 вместе с платформой перемещается кронштейн 7 с роторным датчиком 6 я валом с зубчатым колесом 10. При этом зубчатое колесо 10 обкатывается по неподвижной зубчатой рейке 5, вращая вал 11 и связанный с ним муфтой 14 выходной вал 13 роторного датчика 6. Латчик в зависимости от величины перемещения платформы выдает соответствующее количество электрических импульсов, которое и определяет величину перемещения платформы 3, Так как рейка выполнена косозубой и введена люфтовыбиракзилим механизмом в зацепление с кромками боковых поверхностей
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Зубчато-реечный привод подачи рабочего органа тяжелого крупногабаритного металлорежущего станка | 2021 |
|
RU2780861C1 |
| Резцовая головка для расточных и подрезных работ | 1981 |
|
SU952452A1 |
| Механизм малых подач | 1979 |
|
SU772747A1 |
| ВИБРОСТЕНД | 2000 |
|
RU2188404C1 |
| Устройство Баранова М.К. к станку для обработки конических зубчатых колес | 1989 |
|
SU1734571A3 |
| Способ шлифования зубчатых колес и станок для его осуществления | 1978 |
|
SU880244A3 |
| Зубодолбежный станок | 1987 |
|
SU1569118A1 |
| Радиально-сверлильный станок | 1982 |
|
SU1013126A1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
Изобретение относится к позиционным системам числового программного управления станками. Целью изобретения является повышение точности. Устройство содержит роторный датчик, связанный цилиндрической зубчатой передачей с подвижным органом станка. Реечная цилиндрическая зубчатая передача снабжена люфтовыбнрающим механизмом, при этом рейка передачи выполнена ко- созубой и введена в зацепление с кромками боковых поверхностей цилиндрического прямозубого зубчатого колеса. Обеспечивается точечный контакт зубьев рейки и колеса, что приводит к повышению точности. Люфтовыбнрающий механизм выполнен в виде рычага, установленного с возможностью поворота в плоскости, перпендикулярной направлению перемещения подвижного органа станка, причем роторный датчик и цилиндрическое прямозубое колесо расположены на рычаге. 1 з.п. ф-лы, 3 ил. С/ с
ление с кромками боковых поверхностей ,Q прямозубого колеса, то при перемещецилиндрического прямозубого зубчатого колеса. Обеспечивается точечный контакт зубьев рейки н колеса, что приводит к повышению точности, Люфтовыби- рающий механизм BUHOJVHC : виде рычага, установленного с возможностью поворота п плоскости, перпендикулярной направлению перемещения подвижного органа станка. Причем роторный датчик и цилиндрическое прямояуОое колесо расположены на рычаге.
Изобретение описывается на примере его применения для измерения перемещения платформы силового стола.
На Лиг. 1 изображен силовой стол, нид сбоку; на фиг. 2 - РИД Л на фнг.1 (в увеличенном масштабе); на фиг.З - вид В на фиг. 2.
Силовой .:тол содержит направляющую плиту 1, на которой г направляюгцмх 2 установлена платформа 3, н привод 4 перемещения платформы 3. На плите 1 жч-стко установлена параллельно перемещению платформы 3 яубчагая рейка 5, а роторный датчик 6 скреплен на рычаге лзофтопыбмраюпего уохапизмд в виде кронштейна 7, устан ог чемном на оси 8.
Ось В ра .т.оложена .чрv.;:onbHi h.i- . п стойко , члкреплек35
40
45
50
55
ним колеса в плоскости, перпендикуляр ной направлению перемещения платформы происходят выборка бокового зазора и точечный контакт эубьев в зоне теоретического среднего диаметра зацепления .
Нагрузки, возникающие в зацеплении определяемые собственным сопротивлением датчика, пренебрежимо малы. По- этому точечный контакт, ввиду отсутст вия контактных деформаций от действия внешних и внутренних сил, обеспечивает точное н стабильное положение зубчатого колеса с датчиком относительно рейки. Кроме того, выполнение рейки косозубой расширяет ее технологически возможности.
Датчик, расположенный вместе с зуб чатьгм колесом на поворотном кронштейне в виде рычага, под действием весо- ной составляющей поворачивает его в плоскости, перпендикулярной напранле- нию перемещения платформы, выбирал боковой эазор между колесом и ренкой При этом, в зависимости от могрогшг :- тн ныстлмкн рейки относительно перемещения платформы, зубчат.ое колесо имеете с кронштейном н датчиком гюво- рачимлетги на оси при перемепи-нин
5
0
5
0
5
ним колеса в плоскости, перпендикулярной направлению перемещения платформы, происходят выборка бокового зазора и точечный контакт эубьев в зоне теоретического среднего диаметра зацепления .
Нагрузки, возникающие в зацеплении, определяемые собственным сопротивлением датчика, пренебрежимо малы. По- этому точечный контакт, ввиду отсутствия контактных деформаций от действия внешних и внутренних сил, обеспечивает точное н стабильное положение зубчатого колеса с датчиком относительно рейки. Кроме того, выполнение рейки косозубой расширяет ее технологические возможности.
Датчик, расположенный вместе с зуб- чатьгм колесом на поворотном кронштейне в виде рычага, под действием весо- ной составляющей поворачивает его в плоскости, перпендикулярной напранле- нию перемещения платформы, выбирал боковой эазор между колесом и ренкой. При этом, в зависимости от могрогшг :- тн ныстлмкн рейки относительно перемещения платформы, зубчат.ое колесо имеете с кронштейном н датчиком гюво- рачимлетги на оси при перемепи-нин
платформы относительно рейки и, как бы отслеживая, постоянно контактирует с мерительной зубчатой рейкой, тем самым обеспечивая постоянный натяг под действием весовой составляющей датчика в зубчатом зацеплении.
Таким образом, между датчиком, расположенным на платформе, и рейкой, закрепленной на плите, осуществляется постоянная беэзазорная кинематическая связь, обеспечивая высокую точность измерения перемещения платформы сило- ного стола. При возникновении аварийных перегрузок, когда платформа сило- вого стола, деформируя в пределах упругих деформаций направляющие элементы плиты, разворачивается вместе с датчиком и зубчатым колесом относительно закрепленной на плите рейки, зубчатое колесо, взаимодействуя с рейкой, поворачивает кронштейн с датчиком в плоскости, перпендикулярной направлению перемещения платформы, исключая таким образом поломку измери- тельных элементов устройства.
Формула изобретения
фиг/
фие.2
Вид А
ВидВ
W/ Б
П &
фигЗ
| Станки с числовом программным управлением | |||
| Под ред | |||
| В.А.Лещенко, М.: Машиностроение, 1979, с | |||
| Устройство для усиления микрофонного тока с применением самоиндукции | 1920 |
|
SU42A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ОТЕНА \ | 0 |
|
SU346035A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Программное управление станками | |||
| Под ред | |||
| В.Л.Сосонкнна, М.: Машиностроение, 1981, с | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
